Problém Apollónia - Problem of Apollonius - Wikipedia
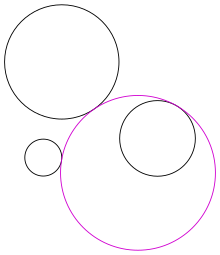

v Geometrie euklidovské roviny, Apolloniův problém je konstruovat kruhy, které jsou tečna do tří daných kruhů v rovině (obrázek 1). Apollonius z Pergy (kolem 262 BC - c. 190 př.nl) položil a vyřešil tento slavný problém ve své práci Ἐπαφαί (Epaphaí, „Tangencies“); tato práce byla ztracený, ale zpráva o jeho výsledcích ze 4. století nl Pappus Alexandrijský přežil. Tři dané kruhy obecně mají osm různých kruhů, které jsou k nim tečné (obrázek 2), dvojice řešení pro každý způsob rozdělení tří daných kruhů na dvě podmnožiny (existují 4 způsoby, jak rozdělit sadu mohutnost 3 ve 2 částech).
V 16. století Adriaan van Roomen vyřešil problém pomocí protínajícího se hyperboly, ale toto řešení nepoužívá pouze pravítko a kompas stavby. François Viète našel takové řešení využíváním omezující případy: kterýkoli ze tří daných kruhů lze zmenšit na nulový poloměr (bod) nebo rozšířit na nekonečný poloměr (čára). Vièteův přístup, který k řešení složitějších případů používá jednodušší omezující případy, je považován za věrohodnou rekonstrukci Apollóniovy metody. Způsob van Roomen byl zjednodušen Isaac Newton, který ukázal, že Apolloniův problém je ekvivalentní nalezení polohy z rozdílů jeho vzdáleností do tří známých bodů. To má aplikace v navigačních a pozičních systémech, jako jsou LORAN.
Později matematici zavedli algebraické metody, které transformují geometrický problém na algebraické rovnice. Tyto metody byly zjednodušeny využíváním symetrie inherentní problému Apollónia: například kruhy řešení se obecně vyskytují ve dvojicích, přičemž jedno řešení obklopuje dané kruhy, které druhé vylučuje (obrázek 2). Joseph Diaz Gergonne použil tuto symetrii k poskytnutí elegantního řešení pravítka a kompasu, zatímco ostatní matematici použili geometrické transformace jako odraz v kruhu zjednodušit konfiguraci daných kruhů. Tento vývoj poskytuje geometrické nastavení pro algebraické metody (pomocí Geometrie sféry lži ) a klasifikace řešení podle 33 zásadně odlišných konfigurací daných kruhů.
Apolloniův problém podnítil mnohem další práci. Zobecnění na tři dimenze - konstrukce koule tečné ke čtyřem daným sférám - a mimo byly studovány. Zvláštní pozornost byla věnována konfiguraci tří vzájemně tečných kruhů. René Descartes dal vzorec vztahující se k poloměrům kruhů řešení a daných kruhů, nyní známých jako Descartova věta. Iterativní řešení Apollóniova problému v tomto případě vede k Apollonian těsnění, což je jeden z prvních fraktály být popsán v tisku a je důležitý v teorie čísel přes Ford kruhy a Hardy – Littlewoodova kruhová metoda.
Prohlášení o problému
Obecným tvrzením o Apollóniově problému je sestrojit jednu nebo více kružnic, které jsou tečné ke třem daným objektům v rovině, kde objektem může být přímka, bod nebo kruh jakékoli velikosti.[1][2][3][4] Tyto objekty mohou být uspořádány jakýmkoli způsobem a mohou se navzájem protínat; obvykle se však považují za odlišné, což znamená, že se neshodují. Někdy se nazývá řešení Apollónova problému Apollonius kruhy, ačkoli termín je také používán pro jiné typy kruhů spojené s Apolloniem.
Vlastnost tečnosti je definována následovně. Nejprve se předpokládá, že bod, čára nebo kružnice jsou tečny k sobě samému; tudíž, pokud je daná kružnice již tečna k dalším dvěma daným objektům, počítá se to jako řešení Apollóniova problému. Říká se, že existují dva odlišné geometrické objekty protínají pokud mají společný bod. Podle definice je bod tečný ke kružnici nebo přímce, pokud je protíná, tj. Leží-li na nich; dva odlišné body tedy nemohou být tečné. Pokud je úhel mezi přímkami nebo kružnicemi v průsečíku nulový, říká se, že jsou tečna; průsečík se nazývá a tečný bod nebo a tečný bod. (Slovo "tangenta" pochází z latinský přítomné příčestí, tangens, což znamená „dotýkat se“.) V praxi jsou dva odlišné kruhy tečné, pokud se protínají pouze v jednom bodě; protínají-li se v nule nebo ve dvou bodech, nejsou tečné. Totéž platí pro úsečku a kružnici. Dvě odlišné čáry nemohou být tečné v rovině, i když dvě paralelní čáry lze považovat za tečnu v a bod v nekonečnu v inverzní geometrie (vidět níže ).[5][6]
Kružnice řešení může být buď interně nebo externě tečná ke každému z daných kruhů. An externí tečnost je ta, kde se dva kruhy ohýbají od sebe v místě dotyku; leží na opačných stranách tečna v tomto bodě a navzájem se vylučují. Vzdálenost mezi jejich středy se rovná součtu jejich poloměrů. Naproti tomu vnitřní tečnost je ta, ve které se oba kruhy křiví stejným způsobem v místě dotyku; dva kruhy leží na stejné straně tečny a jeden kruh uzavírá druhý. V tomto případě se vzdálenost mezi jejich středy rovná rozdílu jejich poloměrů. Pro ilustraci je na obrázku 1 růžový kruh řešení vnitřně tečný k danému černému kruhu střední velikosti vpravo, zatímco z vnější strany je tečný k nejmenším a největším daným kruhům vlevo.
Apolloniův problém lze také formulovat jako problém lokalizace jednoho nebo více bodů tak, že rozdíly jejích vzdáleností do tří daných bodů se rovná třem známým hodnotám. Zvažte kružnici řešení o poloměru rs a tři dané kruhy poloměrů r1, r2 a r3. Pokud je kružnice řešení externě tečná ke všem třem daným kružnicím, vzdálenosti mezi středem kružnice řešení a středy daných kružnic jsou stejné d1 = r1 + rs, d2 = r2 + rs a d3 = r3 + rs, resp. Proto jsou rozdíly v těchto vzdálenostech konstanty, jako např d1 − d2 = r1 − r2; závisí pouze na známých poloměrech daných kruhů, nikoli na poloměru rs kruhu řešení, který se zruší. Tuto druhou formulaci Apollóniova problému lze zobecnit na vnitřně tečné kružnice řešení (pro které se vzdálenost střed-střed rovná rozdílu poloměrů) změnou odpovídajících rozdílů vzdáleností na součty vzdáleností, takže poloměr kružnice řešení rs znovu zruší. Reformulace, pokud jde o vzdálenosti mezi středy, je užitečná v níže uvedená řešení z Adriaan van Roomen a Isaac Newton, a také v hyperbolické umístění nebo trilaterace, což je úkol lokalizovat polohu od rozdílů ve vzdálenostech do tří známých bodů. Například navigační systémy jako LORAN identifikovat polohu přijímače z rozdílů v časech příjezdu signálů ze tří pevných pozic, které odpovídají rozdílům ve vzdálenostech k těmto vysílačům.[7][8]
Dějiny
K vyřešení Apollónova problému byl vyvinut bohatý repertoár geometrických a algebraických metod,[9][10] který byl nazýván „nejslavnějším ze všech“ problémů s geometrií.[3] Originální přístup Apollonius z Pergy byl ztracen, ale rekonstrukce byly nabídnuty François Viète a další, na základě vodítek v popisu od Pappus Alexandrijský.[11][12] První nová metoda řešení byla publikována v roce 1596 autorem Adriaan van Roomen, kteří identifikovali středy kruhů řešení jako průsečíky dvou hyperboly.[13][14] Van Roomenova metoda byla vylepšena v roce 1687 Isaac Newton v jeho Principia,[15][16] a tím John Casey v roce 1881.[17]
Přestože van Roomenova metoda byla úspěšná při řešení Apollóniova problému, měla nevýhodu. Cenná vlastnost v klasice Euklidovská geometrie je schopnost řešit problémy pomocí pouze a kompas a pravítko.[18] Mnoho konstrukcí je nemožné pomocí pouze těchto nástrojů, jako např dělení úhlu na tři stejné části. Mnoho takových „nemožných“ problémů však lze vyřešit protínajícími se křivkami, jako jsou hyperboly, elipsy a paraboly (kuželovité úseky ). Například, zdvojnásobení krychle (problém konstrukce krychle s dvojnásobným objemem dané krychle) nelze provést pouze pomocí pravítka a kompasu, ale Menaechmus ukázal, že problém lze vyřešit pomocí průniků dvou paraboly.[19] Van Roomenovo řešení - které využívá průnik dvou hyperbolas - tedy neurčilo, zda problém uspokojil vlastnost přímky a kompasu.
Van Roomenův přítel François Viète, který naléhal na van Roomen, aby nejprve pracoval na Apolloniusově problému, vyvinul metodu, která používala pouze kompas a pravítko.[20] Před řešením Viète Regiomontanus pochyboval, zda by Apolloniův problém mohl být vyřešen pravítkem a kompasem.[21] Viète nejprve vyřešil několik jednoduchých zvláštních případů Apolloniusova problému, jako je nalezení kruhu, který prochází třemi danými body, který má pouze jedno řešení, pokud jsou body odlišné; poté se začal věnovat řešení složitějších zvláštních případů, v některých případech zmenšením nebo zvětšením daných kruhů.[1] Podle zprávy Pappuse ze 4. století, Apolloniovy vlastní knihy o tomto problému - nazvané Ἐπαφαί (Epaphaí„Tangencies“; Latinský: De tactionibus, De contactibus) - následoval podobný progresivní přístup.[11] Vièteho řešení je proto považováno za věrohodnou rekonstrukci Apollóniova řešení, ačkoli další rekonstrukce byly publikovány samostatně třemi různými autory.[22]
V 19. století bylo vyvinuto několik dalších geometrických řešení Apollóniova problému. Nejpozoruhodnější řešení jsou řešení Jean-Victor Poncelet (1811)[23] a ze dne Joseph Diaz Gergonne (1814).[24] Zatímco Ponceletův důkaz se spoléhá na homotetická centra kruhů a síla bodu věta, Gergonnova metoda využívá konjugovaný vztah mezi řádky a jejich póly v kruhu. Metody využívající inverze kruhu byli průkopníky Julius Petersen v roce 1879;[25] jedním příkladem je prstencová metoda řešení Coxeter HSM.[2] Jiný přístup používá Geometrie sféry lži,[26] který vyvinul Sophus Lie.
Algebraická řešení Apollóniova problému byla průkopníkem v 17. století René Descartes a Princezna Alžběta česká, i když jejich řešení byla poměrně složitá.[9] Praktické algebraické metody byly vyvinuty na konci 18. a 19. století několika matematiky, včetně Leonhard Euler,[27] Nicolas Fuss,[9] Carl Friedrich Gauss,[28] Lazare Carnot,[29] a Augustin Louis Cauchy.[30]
Metody řešení
Protínající se hyperboly

Řešení Adriaan van Roomen (1596) je založen na průsečíku dvou hyperboly.[13][14] Nechť jsou dané kruhy označeny jako C1, C2 a C3. Van Roomen vyřešil obecný problém vyřešením jednoduššího problému, spočívajícího v hledání kruhů, které jsou tečné dva dané kruhy, jako např C1 a C2. Poznamenal, že střed kružnice dotýkající se obou daných kružnic musí ležet na a hyperbola jejichž ohniska jsou středy daných kruhů. Abychom tomu porozuměli, necháme poloměry kruhu řešení a dvou daných kruhů označit jako rs, r1 a r2(Obrázek 3). Vzdálenost d1 mezi středy kruhu řešení a C1 je buď rs + r1 nebo rs − r1, v závislosti na tom, zda jsou tyto kruhy vybrány jako vnější nebo vnitřní tečna. Podobně i vzdálenost d2 mezi středy kruhu řešení a C2 je buď rs + r2 nebo rs − r2, opět v závislosti na zvolené tečnosti. Rozdíl tedy d1 − d2 mezi těmito vzdálenostmi je vždy konstanta, na které nezávisí rs. Tato vlastnost, mít pevný rozdíl mezi vzdálenostmi k ohniska, charakterizuje hyperboly, takže možná centra kruhu řešení leží na hyperbole. Pro dvojici daných kruhů lze nakreslit druhou hyperbolu C2 a C3, kde vnitřní nebo vnější tečnost řešení a C2 by měla být zvolena konzistentně s první hyperbolou. Průsečík těchto dvou hyperbolas (pokud existuje) dává střed kružnice řešení, která má zvolenou vnitřní a vnější tečnost ke třem daným kružnicím. Úplnou sadu řešení Apolloniova problému lze nalézt zvážením všech možných kombinací vnitřní a vnější tečnosti kružnice řešení ke třem daným kružnicím.
Isaac Newton (1687) rafinoval van Roomenovo řešení, takže středy kružnice řešení byly umístěny na křižovatkách přímky s kružnicí.[15] Newton formuluje Apolloniův problém jako problém v trilaterace: k vyhledání bodu Z ze tří daných bodů A, B a C, takže rozdíly ve vzdálenostech od Z do tří daných bodů mají známé hodnoty.[31] Tyto čtyři body odpovídají středu kružnice řešení (Z) a středy tří daných kruhů (A, B a C).

Místo řešení pro dvě hyperboly, Newton konstruuje jejich přímé linie namísto. U jakékoli hyperboly poměr vzdáleností od bodu Z zaměřit se A a k přímé matici je pevná konstanta zvaná excentricita. Tyto dva adresáře se protínají v bodě T, a ze svých dvou známých poměrů vzdáleností Newton sestrojí linii procházející skrz T na kterých Z musí lhát. Poměr vzdáleností TZ / TA je však také známý; proto, Z leží také na známém kruhu, protože Apollonius ukázal, že a kruh může být definovaný jako množina bodů, které mají daný poměr vzdáleností ke dvěma pevným bodům. (Kromě toho je tato definice základem bipolární souřadnice.) Řešení Apolloniovho problému jsou tedy průsečíky přímky s kružnicí.
Rekonstrukce Viète
Jak je popsáno níže, Apolloniův problém má deset zvláštních případů, v závislosti na povaze tří daných objektů, kterými mohou být kruh (C), řádek (L) nebo bod (P). Podle zvyku se těchto deset případů odlišuje třípísmenovými kódy, například CCP.[32] Viète vyřešilo všech deset těchto případů pouze pomocí kompasových a přímkových konstrukcí a k řešení složitějších případů použilo řešení jednodušších případů.[1][20]

Viète začala řešením PPP případ (tři body) podle metody Euklid v jeho Elementy. Z toho odvodil a lemma odpovídající síla bodu věta, kterou použil k řešení LPP případ (čára a dva body). Následující Euclid podruhé, Viète vyřešil JÁ BUDU případ (tři řádky) pomocí úhlové přímky. Poté odvodil lema pro konstrukci přímky kolmé na úhlovou přímku procházející bodem, kterou použil k řešení LLP problém (dvě čáry a bod). To odpovídá za první čtyři případy Apollóniova problému, u těch, které nezahrnují kruhy.
K vyřešení zbývajících problémů Viète využil skutečnosti, že dané kruhy a kruh řešení mohou být v tandemu přehodnoceny při zachování jejich tečnosti (obrázek 4). Pokud se poloměr kružnice řešení změní o částku Δr, poloměr jeho vnitřně dotyčné dané kružnice musí být rovněž změněn o Δr, zatímco poloměr jeho externě dotyčnic daných kruhů musí být změněn o −Δr. Jak se kruh řešení zvětšuje, musí se interně dotyčné dané kruhy bobtnat v tandemu, zatímco externě tangensové dané kruhy se musí zmenšit, aby se zachovala jejich tečnost.
Viète použil tento přístup ke zmenšení jednoho z daných kruhů do bodu, čímž se problém zmenšil na jednodušší, již vyřešený případ. Nejprve vyřešil CLL případ (kruh a dvě čáry) zmenšením kruhu na bod, čímž jej vykreslí a LLP případ. Poté vyřešil CLP případ (kruh, přímka a bod) pomocí tří lemmat. Viète znovu zmenšila jeden kruh na bod a transformovala CCL případ do a CLP případ. Poté vyřešil CPP případ (kruh a dva body) a CCP případ (dva kruhy a bod), druhý případ dvěma lematy. Nakonec Viète vyřešil generála CCC případ (tři kruhy) zmenšením jedné kružnice na bod, čímž se vykreslí a CCP případ.
Algebraická řešení
Apolloniův problém lze formovat jako soustavu tří rovnic pro střed a poloměr kružnice řešení.[33] Jelikož tři dané kružnice a jakákoli kružnice řešení musí ležet ve stejné rovině, lze jejich polohy určit z hlediska (X, y) souřadnice jejich center. Například středové polohy tří daných kruhů lze zapsat jako (X1, y1), (X2, y2) a (X3, y3), zatímco kruh řešení lze zapsat jako (Xs, ys). Podobně lze poloměry daných kruhů a kružnice řešení zapsat jako r1, r2, r3 a rs, resp. Požadavek, že kruh řešení se musí přesně dotknout každého ze tří daných kruhů, lze vyjádřit třemi spojený kvadratické rovnice pro Xs, ys a rs:



Tři čísla s1, s2 a s3 na pravá strana, nazývané znaky, se může rovnat ± 1 a určit, zda by se požadovaný kruh řešení měl interně dotýkat odpovídajícího daného kruhu (s = 1) nebo externě (s = -1). Například na obrázcích 1 a 4 je růžové řešení vnitřně tečné k danému kruhu střední velikosti vpravo a externě tečné k nejmenšímu a největšímu danému kruhu vlevo; pokud jsou dané kruhy seřazeny podle poloměru, jsou znaménka pro toto řešení "− + −". Vzhledem k tomu, že tři znaménka lze zvolit nezávisle, existuje osm možných sad rovnic (2 × 2 × 2 = 8), přičemž každá sada odpovídá jednomu z osmi typů kruhů řešení.
Obecný systém tří rovnic lze vyřešit metodou výslednice. Po vynásobení mají všechny tři rovnice Xs2 + ys2 na levé straně a rs2 na pravé straně. Odečtením jedné rovnice od druhé se tyto kvadratické výrazy vylučují; zbývající lineární členy mohou být znovu uspořádány tak, aby poskytly vzorce pro souřadnice Xs a ys


kde M, N, P a Q jsou známé funkce daných kruhů a volba znaků. Substituce těchto vzorců do jedné z počátečních tří rovnic dává kvadratickou rovnici pro rs, což může vyřešit kvadratický vzorec. Nahrazení číselné hodnoty rs do lineárních vzorců získá odpovídající hodnoty Xs a ys.
Znamení s1, s2 a s3 na pravé straně rovnic lze zvolit osm možných způsobů a každá volba znaménka poskytuje až dvě řešení, protože rovnice pro rs je kvadratický. To by mohlo naznačovat (nesprávně), že existuje až šestnáct řešení Apolloniusova problému. Kvůli symetrii rovnic však platí, že (rs, Xs, ys) je řešení se značkami si, pak je (-rs, Xs, ys), s opačnými znaménky -si, což představuje stejný kruh řešení. Proto má Apollóniový problém nanejvýš osm nezávislých řešení (obrázek 2). Jedním ze způsobů, jak se tomuto dvojímu započítání vyhnout, je uvažovat pouze o kruzích řešení s nezáporným poloměrem.
Dva kořeny jakékoli kvadratické rovnice mohou být ze tří možných typů: dva různé reálná čísla, dvě identická reálná čísla (tj. zdegenerovaný dvojitý kořen) nebo pár komplexní konjugát kořeny. První případ odpovídá obvyklé situaci; každý pár kořenů odpovídá dvojici řešení, která spolu souvisí inverze kruhu, jak je popsáno níže (obrázek 6). V druhém případě jsou oba kořeny identické, což odpovídá kruhu řešení, který se v inverzi transformuje do sebe. V tomto případě je jeden z daných kruhů sám řešením problému Apollonius a počet odlišných řešení je snížen o jednu. Třetí případ komplexních poloměrů konjugátu neodpovídá geometricky možnému řešení Apolloniova problému, protože kruh řešení nemůže mít imaginární poloměr; proto je počet řešení snížen o dvě. Apolloniův problém nemůže mít sedm řešení, i když může mít jakýkoli jiný počet řešení od nuly do osmi.[12][34]
Geometrie sféry lži
Stejné algebraické rovnice lze odvodit v kontextu Geometrie sféry lži.[26] Tato geometrie představuje kruhy, čáry a body jednotným způsobem jako pětidimenzionální vektor X = (proti, CX, Cy, w, sr), kde C = (CX, Cy) je střed kruhu a r je jeho (nezáporný) poloměr. Li r není nula, znaménko s může být pozitivní nebo negativní; pro vizualizaci, s představuje orientace kruhu, přičemž kruhy proti směru hodinových ručiček mají kladnou hodnotu s a kruhy ve směru hodinových ručiček, které mají zápor s. Parametr w je nula pro přímku a jedna jinak.
V tomto pětrozměrném světě existuje bilineární produkt podobný produktu Tečkovaný produkt:

The Lež kvadrik je definován jako vektory, jejichž součin se sebou (jejich čtvercová norma ) je nula, (X|X) = 0. Nechť X1 a X2 být dva vektory patřící do tohoto kvadrika; norma jejich rozdílu se rovná

Produkt distribuuje přes sčítání a odčítání (přesněji řečeno je bilineární ):

Od té doby (X1|X1) = (X2|X2) = 0 (oba patří do Lieova kvadrika) a od té doby w1 = w2 = 1 pro kruhy, součin libovolných dvou takových vektorů na kvadrickém se rovná

kde se svislé pruhy sendvičují C1 − C2 představují délku tohoto rozdílového vektoru, tj Euklidovská norma. Tento vzorec ukazuje, že pokud dva kvadrické vektory X1 a X2 jsou vzájemně kolmé (kolmé) - tj. pokud (X1|X2) = 0 - pak jsou jejich odpovídající kružnice tečné. Protože pokud jsou dvě znamení s1 a s2 jsou stejné (tj. kruhy mají stejnou „orientaci“), kruhy jsou vnitřně tečné; vzdálenost mezi jejich středy se rovná rozdíl v poloměrech

Naopak, pokud se obě znamení s1 a s2 jsou různé (tj. kruhy mají opačnou „orientaci“), kruhy jsou externě tečné; vzdálenost mezi jejich středy se rovná součet poloměrů

Proto může být Apolloniův problém znovu uveden v Lieově geometrii jako problém hledání kolmých vektorů na Lieově kvadriku; konkrétně cílem je identifikovat vektory řešení Xsol které patří do Lieova kvadrika a jsou také kolmé (kolmé) na vektory X1, X2 a X3 odpovídající daným kruhům.

Výhodou tohoto nového tvrzení je, že lze věty využívat lineární algebra o maximálním počtu lineárně nezávislé, současně kolmé vektory. To dává další způsob, jak vypočítat maximální počet řešení a rozšířit teorém do prostorů s vyšší dimenzí.[26][35]
Inverzivní metody

Přirozené prostředí pro problém Apollónia je inverzní geometrie.[4][12] Základní strategií inverzních metod je transformace daného problému Apollonius na jiný problém Apollonius, který je jednodušší vyřešit; řešení původního problému lze najít z řešení transformovaného problému zrušením transformace. Transformace kandidátů musí změnit jeden Apolloniův problém na jiný; proto musí transformovat dané body, kruhy a čáry na jiné body, kruhy a čáry a žádné jiné tvary. Inverze kruhu má tuto vlastnost a umožňuje uvážlivě zvolit střed a poloměr inverzního kruhu. Mezi další kandidáty patří Izometrie euklidovské roviny; problém však nezjednodušují, protože pouze posun, točit se, a zrcadlo původní problém.
Inverze v kruhu se středem Ó a poloměr R Skládá se z následující operace (obrázek 5): každý bod P je mapován do nového bodu P ' takhle Ó, P, a P ' jsou kolineární a součin vzdáleností P a P ' do centra Ó stejný poloměr R na druhou

Pokud tedy P leží tedy mimo kruh P ' leží uvnitř a naopak. Když P je stejné jako Ó, říká se, že inverze posílá P do nekonečna. (V komplexní analýza, "nekonečno" je definováno ve smyslu Riemannova koule.) Inverze má užitečnou vlastnost, že čáry a kruhy se vždy transformují na čáry a kruhy a body se vždy transformují na body. Kruhy jsou obecně transformovány do jiných kruhů pod inverzí; pokud však kruh prochází středem inverzního kruhu, transformuje se na přímku a naopak. Důležité je, že pokud kruh protíná kruh inverze v pravých úhlech (protíná se kolmo), je inverzí ponechán beze změny; transformuje se do sebe.
Inverze kruhu odpovídají podmnožině Möbiovy transformace na Riemannova koule. Rovinný problém Apollonius lze přenést do sféry pomocí inverzní stereografická projekce; tedy řešení rovinného Apollóniového problému se týká i jeho protějšku ve sféře. Kromě níže popsaných běžných řešení rovinného problému jsou možná i další inverzní řešení.[36]
Dvojice řešení inverzí
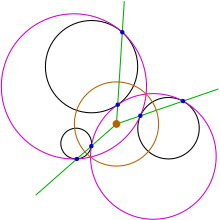
Řešení Apolloniusova problému se obvykle vyskytují ve dvojicích; pro každý kruh řešení je kruh konjugovaného roztoku (obrázek 6).[1] Jeden kruh řešení vylučuje dané kruhy, které jsou uzavřeny jeho konjugovaným řešením, a naopak. Například na obrázku 6 jeden kruh řešení (růžový, vlevo nahoře) obklopuje dva dané kruhy (černý), ale vylučuje třetí; naopak, jeho konjugované řešení (také růžové, vpravo dole) obklopuje tento třetí daný kruh, ale vylučuje další dva. Dva kruhy konjugovaného roztoku jsou spojeny pomocí inverze, následujícím argumentem.
Obecně platí, že jakékoli tři odlišné kruhy mají jedinečný kruh - radikální kruh —Který protíná všechny kolmo; střed tohoto kruhu je radikální centrum ze tří kruhů.[4] Pro ilustraci oranžový kruh na obrázku 6 protíná černé dané kruhy v pravých úhlech. Inverze v radikálním kruhu ponechá dané kruhy beze změny, ale transformuje dva kruhy konjugovaného růžového roztoku do sebe. Při stejné inverzi se odpovídající body tečnosti dvou kruhů řešení transformují do sebe; pro ilustraci na obrázku 6 jsou dva modré body ležící na každé zelené čáře transformovány do sebe. Proto jsou čáry spojující tyto konjugované tečné body invariantní pod inverzí; proto musí projít středem inverze, což je radikální střed (zelené čáry protínající oranžovou tečku na obrázku 6).
Inverze mezikruží
Pokud se dva ze tří daných kruhů neprotínají, lze zvolit střed inverze, aby se tyto dva dané kruhy staly koncentrický.[2][12] Pod touto inverzí musí kruhy řešení spadat do prstenec mezi dvěma soustřednými kruhy. Patří tedy do dvou jednoparametrových rodin. V první rodině (obrázek 7) řešení fungují ne uzavřete vnitřní soustředný kruh, ale spíše se točí jako kuličková ložiska v mezikruží. Ve druhé rodině (obrázek 8) obklopují kruhy řešení vnitřní soustředný kruh. Obecně existují čtyři řešení pro každou rodinu, která poskytují osm možných řešení, shodných s algebraické řešení.


Jsou-li dva z uvedených kruhů soustředné, lze Apolloniův problém snadno vyřešit pomocí metody Gauss.[28] Poloměry tří daných kruhů jsou známé, stejně jako vzdálenost dne ze společného soustředného středu do nekoncentrického kruhu (obrázek 7). Kruh řešení lze určit z jeho poloměru rs, úhel θ a vzdálenosti ds a dT od jeho středu ke společnému soustřednému středu a ke středu nekoncentrického kruhu. Poloměr a vzdálenost ds jsou známy (obrázek 7) a vzdálenost dT = rs ± rne, v závislosti na tom, zda je kružnice řešení interně nebo externě tečná k nekoncentrickému kruhu. Proto by zákon kosinů,

Tady nová konstanta C byl definován pro stručnost, přičemž dolní index udává, zda je řešení externě nebo interně tečné. Jednoduchá trigonometrická změna uspořádání přináší čtyři řešení

Tento vzorec představuje čtyři řešení, která odpovídají dvěma možnostem znaménka θ a dvěma možnostem pro C. Zbývající čtyři řešení lze získat stejnou metodou za použití substitucí za rs a ds indikováno na obrázku 8. Takto lze touto metodou nalézt všech osm řešení obecného problému Apollonius.
Jakékoli počáteční dva nesouvislé dané kruhy lze vykreslit soustředně následovně. The radikální osa ze dvou daných kruhů je vytvořena; výběr dvou libovolných bodů P a Q na této radikální ose lze sestrojit dva kruhy, které jsou vystředěny P a Q a které protínají dva dané kruhy kolmo. Tyto dva vytvořené kruhy se protínají ve dvou bodech. Inverze v jednom takovém průsečíku F vykreslí vytvořené kruhy do přímek vycházejících z F a dva dané kruhy do soustředných kruhů, přičemž třetí daný kruh se stal dalším kruhem (obecně). Toto následuje, protože systém kruhů je ekvivalentní množině Apollonian kruhy, tvořící a bipolární souřadnicový systém.
Změna velikosti a inverze
Užitečnost inverze lze významně zvýšit změnou velikosti.[37][38] Jak je uvedeno v Rekonstrukce Viète, tři dané kružnice a kružnici řešení lze měnit v tandemu při zachování jejich tečnosti. Počáteční problém Apollonius je tedy transformován na jiný problém, který může být snadněji vyřešen. Například lze změnit velikost čtyř kruhů tak, aby se jeden daný kruh zmenšil na bod; alternativně lze často změnit velikost dvou daných kruhů tak, aby byly vzájemně tečné. Za třetí, dané kruhy, které se protínají, lze změnit tak, aby se neprotínají, a poté metoda převrácení na mezikruží lze použít. Ve všech těchto případech se řešení původního problému Apollonius získá z řešení transformovaného problému zrušením změny velikosti a inverze.
Zmenšení jedné dané kružnice na bod
V prvním přístupu jsou dané kruhy zmenšeny nebo zvětšeny (přiměřeně k jejich tečnosti), dokud se jeden daný kruh nezmění na bod P.[37] V takovém případě se Apolloniový problém zvrhl na CCP omezující případ, což je problém najít kružnici řešení tečnou ke dvěma zbývajícím daným kružnicím, které procházejí bodem P. Inverze v kruhu se středem na P transformuje dva dané kruhy na nové kruhy a kruh řešení na čáru. Transformovaným řešením je tedy přímka, která je tečná ke dvěma transformovaným daným kruhům. Existují čtyři takové linie řešení, které mohou být konstruovány z vnějšku a zevnitř homotetická centra ze dvou kruhů. Re-inverze dovnitř P a vrácení změny velikosti transformuje takovou linii řešení do požadovaného kruhu řešení původního problému Apollonius. Všech osm obecných řešení lze získat zmenšením a zvětšením kruhů podle různých vnitřních a vnějších tečností každého řešení; různé dané kruhy však mohou být zmenšeny na bod pro různá řešení.
Změna velikosti dvou daných kruhů na tečnost
Ve druhém přístupu jsou poloměry daných kruhů vhodně upraveny o částku Δr takže dva z nich jsou tangenciální (dotýkají se).[38] Jejich tečný bod je vybrán jako střed inverze v kruhu který protíná každý ze dvou dotýkajících se kruhů na dvou místech. Upon inversion, the touching circles become two parallel lines: Their only point of intersection is sent to infinity under inversion, so they cannot meet. The same inversion transforms the third circle into another circle. The solution of the inverted problem must either be (1) a straight line parallel to the two given parallel lines and tangent to the transformed third given circle; or (2) a circle of constant radius that is tangent to the two given parallel lines and the transformed given circle. Re-inversion and adjusting the radii of all circles by Δr produces a solution circle tangent to the original three circles.
Gergonne's solution

Gergonne's approach is to consider the solution circles in pairs.[1] Let a pair of solution circles be denoted as CA a CB (the pink circles in Figure 6), and let their tangent points with the three given circles be denoted as A1, A2, A3, a B1, B2, B3, resp. Gergonne's solution aims to locate these six points, and thus solve for the two solution circles.
Gergonne's insight was that if a line L1 could be constructed such that A1 a B1 were guaranteed to fall on it, those two points could be identified as the intersection points of L1 with the given circle C1 (Obrázek 6). The remaining four tangent points would be located similarly, by finding lines L2 a L3 který obsahoval A2 a B2, a A3 a B3, resp. To construct a line such as L1, two points must be identified that lie on it; but these points need not be the tangent points. Gergonne was able to identify two other points for each of the three lines. One of the two points has already been identified: the radikální centrum G lies on all three lines (Figure 6).
To locate a second point on the lines L1, L2 a L3, Gergonne noted a reciprocal relationship between those lines and the radikální osa R of the solution circles, CA a CB. To understand this reciprocal relationship, consider the two tangent lines to the circle C1 drawn at its tangent points A1 a B1 with the solution circles; the intersection of these tangent lines is the pól bod L1 v C1. Since the distances from that pole point to the tangent points A1 a B1 are equal, this pole point must also lie on the radical axis R of the solution circles, by definition (Figure 9). The relationship between pole points and their polar lines is reciprocal; if the pole of L1 v C1 leží na R, the pole of R v C1 must conversely lie on L1. Thus, if we can construct R, we can find its pole P1 v C1, giving the needed second point on L1 (Figure 10).

Gergonne found the radical axis R of the unknown solution circles as follows. Any pair of circles has two centers of similarity; these two points are the two possible intersections of two tangent lines to the two circles. Therefore, the three given circles have six centers of similarity, two for each distinct pair of given circles. Remarkably, these six points lie on four lines, three points on each line; moreover, each line corresponds to the radikální osa of a potential pair of solution circles. To show this, Gergonne considered lines through corresponding points of tangency on two of the given circles, e.g., the line defined by A1/A2 and the line defined by B1/B2. Nechat X3 be a center of similitude for the two circles C1 a C2; pak, A1/A2 a B1/B2 are pairs of antihomologous points, and their lines intersect at X3. It follows, therefore, that the products of distances are equal

což z toho vyplývá X3 lies on the radical axis of the two solution circles. The same argument can be applied to the other pairs of circles, so that three centers of similitude for the given three circles must lie on the radical axes of pairs of solution circles.
In summary, the desired line L1 is defined by two points: the radical center G of the three given circles and the pole in C1 of one of the four lines connecting the homothetic centers. Finding the same pole in C2 a C3 dává L2 a L3, v uvedeném pořadí; thus, all six points can be located, from which one pair of solution circles can be found. Repeating this procedure for the remaining three homothetic-center lines yields six more solutions, giving eight solutions in all. However, if a line Lk does not intersect its circle Ck pro některé k, there is no pair of solutions for that homothetic-center line.
Teorie křižovatky
The techniques of modern algebraická geometrie, a zejména teorie průniku, can be used to solve Apollonius's problem. In this approach, the problem is reinterpreted as a statement about circles in the složitá projektivní rovina. Solutions involving complex numbers are allowed and degenerate situations are counted with multiplicity. When this is done, there are always eight solutions to the problem.[39]
Every quadratic equation in X, Y, a Z determines a unique conic, its vanishing locus. Conversely, every conic in the complex projective plane has an equation, and that equation is unique up to an overall scaling factor (because rescaling an equation does not change its vanishing locus). Therefore, the set of all conics may be parametrized by five-dimensional projective space P5, where the correspondence is
![{ displaystyle {[X: Y: Z] v mathbf {P} ^ {2} dvojtečka AX ^ {2} + BXY + CY ^ {2} + DXZ + EYZ + FZ ^ {2} = 0 } leftrightarrow [A: B: C: D: E: F] in mathbf {P} ^ {5}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f3d37635cf40391509ffad6dc73780499a2e540)
A kruh in the complex projective plane is defined to be a conic that passes through the two points Ó+ = [1 : i : 0] a Ó− = [1 : −i : 0], kde i denotes a square root of −1. Body Ó+ a Ó− se nazývají circular points. The projective variety of all circles is the subvariety of P5 consisting of those points which correspond to conics passing through the circular points. Substituting the circular points into the equation for a generic conic yields the two equations


Taking the sum and difference of these equations shows that it is equivalent to impose the conditions
- a .


Therefore, the variety of all circles is a three-dimensional linear subspace of P5. After rescaling and dokončení náměstí, these equations also demonstrate that every conic passing through the circular points has an equation of the form

which is the homogenization of the usual equation of a circle in the affine plane. Therefore, studying circles in the above sense is nearly equivalent to studying circles in the conventional sense. The only difference is that the above sense permits degenerate circles which are the union of two lines. The non-degenerate circles are called smooth circles, while the degenerate ones are called jednotné číslo kruhy. There are two types of singular circles. One is the union of the line at infinity Z = 0 with another line in the projective plane (possibly the line at infinity again), and the other is union of two lines in the projective plane, one through each of the two circular points. These are the limits of smooth circles as the radius r má sklony k +∞ a 0, resp. In the latter case, no point on either of the two lines has real coordinates except for the origin [0 : 0 : 1].
Nechat D be a fixed smooth circle. Li C is any other circle, then, by the definition of a circle, C a D intersect at the circular points Ó+ a Ó−. Protože C a D are conics, Bézoutova věta naznačuje C a D intersect in four points total, when those points are counted with the proper multiplicita křižovatky. That is, there are four points of intersection Ó+, Ó−, P, a Q, but some of these points might collide. Appolonius' problem is concerned with the situation where P = Q, meaning that the intersection multiplicity at that point is 2; -li P is also equal to a circular point, this should be interpreted as the intersection multiplicity being 3.
Nechat ZD be the variety of circles tangent to D. This variety is a quadric cone in the P3 of all circles. To see this, consider the incidence correspondence

For a curve that is the vanishing locus of a single equation F = 0, the condition that the curve meets D na r with multiplicity m znamená, že Taylor série expanze F|D vanishes to order m na r; je to proto m linear conditions on the coefficients of F. This shows that, for each r, vlákno z Φ přes r je P1 cut out by two linear equations in the space of circles. Tudíž, Φ is irreducible of dimension 2. Since it is possible to exhibit a circle that is tangent to D at only a single point, a generic element of ZD must be tangent at only a single point. Therefore, the projection Φ → P2 odesílání (r, C) na C je birational morphism. It follows that the image of Φ, který je ZD, is also irreducible and two dimensional.
To determine the shape of ZD, fix two distinct circles C0 a C∞, not necessarily tangent to D. These two circles determine a tužka, meaning a line L v P3 of circles. If the equations of C0 a C∞ jsou F a G, respectively, then the points on L correspond to the circles whose equations are Sv + Tg, kde [S : T] je bod P1. The points where L splňuje ZD are precisely the circles in the pencil that are tangent to D.
There are two possibilities for the number of points of intersections. One is that either F nebo G, řekněme F, is the equation for D. V tomto případě, L is a line through D. Li C∞ je tangenta k D, then so is every circle in the pencil, and therefore L is contained in ZD. The other possibility is that neither F ani G is the equation for D. In this case, the function (F / G)|D is a quotient of quadratics, neither of which vanishes identically. Therefore, it vanishes at two points and has póly at two points. These are the points in C0 ∩ D a C∞ ∩ D, respectively, counted with multiplicity and with the circular points deducted. The rational function determines a morphism D → P1 of degree two. The fiber over [S : T] ∈ P1 je množina bodů P pro který F(P)T = G(P)S. These are precisely the points at which the circle whose equation is Tf − Sg splňuje D. The odbočné body of this morphism are the circles tangent to D. Podle Riemann – Hurwitzův vzorec, there are precisely two branch points, and therefore L splňuje ZD in two points. Together, these two possibilities for the intersection of L a ZD demonstrate that ZD is a quadric cone. All such cones in P3 are the same up to a change of coordinates, so this completely determines the shape of ZD.
To conclude the argument, let D1, D2, a D3 be three circles. If the intersection ZD1 ∩ ZD2 ∩ ZD3 is finite, then it has degree 23 = 8, and therefore there are eight solutions to the problem of Apollonius, counted with multiplicity. To prove that the intersection is generically finite, consider the incidence correspondence

There is a morphism which projects Ψ onto its final factor of P3. The fiber over C je ZC3. This has dimension 6, tak Ψ má rozměr 9. Protože (P3)3 also has dimension 9, the generic fiber of the projection from Ψ to the first three factors cannot have positive dimension. This proves that generically, there are eight solutions counted with multiplicity. Since it is possible to exhibit a configuration where the eight solutions are distinct, the generic configuration must have all eight solutions distinct.
Poloměry
In the generic problem with eight solution circles, The reciprocals of the radii of four of the solution circles sum to the same value as do the reciprocals of the radii of the other four solution circles [40]
Speciální případy
Ten combinations of points, circles, and lines
Apollonius problem is to construct one or more circles tangent to three given objects in a plane, which may be circles, points, or lines. This gives rise to ten types of Apollonius' problem, one corresponding to each combination of circles, lines and points, which may be labeled with three letters, either C, Lnebo P, to denote whether the given elements are a circle, line or point, respectively (stůl 1 ).[32] As an example, the type of Apollonius problem with a given circle, line, and point is denoted as CLP.
Některé z těchto speciální případy are much easier to solve than the general case of three given circles. The two simplest cases are the problems of drawing a circle through three given points (PPP) or tangent to three lines (JÁ BUDU), which were solved first by Euklid v jeho Elementy. Například PPP problem can be solved as follows. The center of the solution circle is equally distant from all three points, and therefore must lie on the perpendicular bisector line of any two. Hence, the center is the point of intersection of any two perpendicular bisectors. Podobně v JÁ BUDU case, the center must lie on a line bisecting the angle at the three intersection points between the three given lines; hence, the center lies at the intersection point of two such angle bisectors. Since there are two such bisectors at every intersection point of the three given lines, there are four solutions to the general JÁ BUDU problém.
Points and lines may be viewed as special cases of circles; a point can be considered as a circle of infinitely small radius, and a line may be thought of an infinitely large circle whose center is also at infinity. From this perspective, the general Apollonius problem is that of constructing circles tangent to three given circles. The nine other cases involving points and lines may be viewed as omezující případy of the general problem.[32][12] These limiting cases often have fewer solutions than the general problem; for example, the replacement of a given circle by a given point halves the number of solutions, since a point can be construed as an infinitesimal circle that is either internally or externally tangent.
| Index | Kód | Given Elements | Počet řešení (obecně) | Příklad (solution in pink; given objects in black) |
|---|---|---|---|---|
| 1 | PPP | three points | 1 |  |
| 2 | LPP | one line and two points | 2 | |
| 3 | LLP | two lines and a point | 2 | 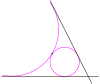 |
| 4 | CPP | one circle and two points | 2 |  |
| 5 | JÁ BUDU | three lines | 4 | 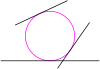 |
| 6 | CLP | one circle, one line, and a point | 4 |  |
| 7 | CCP | two circles and a point | 4 | 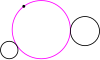 |
| 8 | CLL | one circle and two lines | 8 | 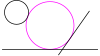 |
| 9 | CCL | two circles and a line | 8 | 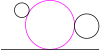 |
| 10 | CCC | three circles (the classic problem) | 8 |  |
Počet řešení

The problem of counting the number of solutions to different types of Apollonius' problem belongs to the field of enumerativní geometrie.[12][41] The general number of solutions for each of the ten types of Apollonius' problem is given in Table 1 above. However, special arrangements of the given elements may change the number of solutions. For illustration, Apollonius' problem has no solution if one circle separates the two (Figure 11); to touch both the solid given circles, the solution circle would have to cross the dashed given circle; but that it cannot do, if it is to touch the dashed circle tangentially. Conversely, if three given circles are all tangent at the same point, then žádný circle tangent at the same point is a solution; such Apollonius problems have an infinite number of solutions. If any of the given circles are identical, there is likewise an infinity of solutions. If only two given circles are identical, there are only two distinct given circles; the centers of the solution circles form a hyperbola, jak se používá v one solution to Apollonius' problem.
An exhaustive enumeration of the number of solutions for all possible configurations of three given circles, points or lines was first undertaken by Muirhead in 1896,[42] although earlier work had been done by Stoll[43] and Study.[44] However, Muirhead's work was incomplete; it was extended in 1974[45] and a definitive enumeration, with 33 distinct cases, was published in 1983.[12] Although solutions to Apollonius' problem generally occur in pairs related by inverze, an odd number of solutions is possible in some cases, e.g., the single solution for PPP, or when one or three of the given circles are themselves solutions. (An example of the latter is given in the sekce na Descartova věta.) However, there are no Apollonius problems with seven solutions.[34][43] Alternative solutions based on the geometry of circles and spheres have been developed and used in higher dimensions.[26][35]
Mutually tangent given circles: Soddy's circles and Descartes' theorem
If the three given circles are mutually tangent, Apollonius' problem has five solutions. Three solutions are the given circles themselves, since each is tangent to itself and to the other two given circles. The remaining two solutions (shown in red in Figure 12) correspond to the napsaný a circumscribed circles a jsou voláni Soddy's circles.[46] This special case of Apollonius' problem is also known as the four coins problem.[47] The three given circles of this Apollonius problem form a Steinerův řetěz tangent to the two Soddy's circles.

Either Soddy circle, when taken together with the three given circles, produces a set of four circles that are mutually tangent at six points. The radii of these four circles are related by an equation known as Descartova věta. In a 1643 letter to Princess Alžběty české,[48] René Descartes to ukázal

kde ks = 1/rs a rs jsou zakřivení and radius of the solution circle, respectively, and similarly for the curvatures k1, k2 a k3 a poloměry r1, r2 a r3 of the three given circles. For every set of four mutually tangent circles, there is a second set of four mutually tangent circles that are tangent at the same six points.[2][49]
Descartes' theorem was rediscovered independently in 1826 by Jakob Steiner,[50] in 1842 by Philip Beecroft,[2][49] and again in 1936 by Frederick Soddy.[51] Soddy published his findings in the scientific journal Příroda as a poem, The Kiss Precise, of which the first two stanzas are reproduced below. The first stanza describes Soddy's circles, whereas the second stanza gives Descartes' theorem. In Soddy's poem, two circles are said to "kiss" if they are tangent, whereas the term "bend" refers to the curvature k of the circle.
|
|
Sundry extensions of Descartes' theorem have been derived by Daniel Pedoe.[52]
Zobecnění
Apollonius' problem can be extended to construct all the circles that intersect three given circles at a precise angle θ, or at three specified crossing angles θ1, θ2 a θ3;[50] the ordinary Apollonius' problem corresponds to a special case in which the crossing angle is zero for all three given circles. Another generalization is the dvojí of the first extension, namely, to construct circles with three specified tangential distances from the three given circles.[26]
Apollonius' problem can be extended from the plane to the koule a další quadratic surfaces. For the sphere, the problem is to construct all the circles (the boundaries of kulové čepice ) that are tangent to three given circles on the sphere.[24][53][54] This spherical problem can be rendered into a corresponding planar problem using stereografická projekce. Once the solutions to the planar problem have been constructed, the corresponding solutions to the spherical problem can be determined by inverting the stereographic projection. Even more generally, one can consider the problem of four tangent curves that result from the intersections of an arbitrary quadratic surface and four planes, a problem first considered by Charles Dupin.[9]
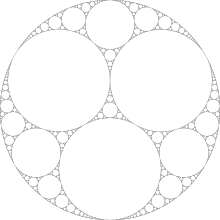
By solving Apollonius' problem repeatedly to find the inscribed circle, the interstices between mutually tangential circles can be filled arbitrarily finely, forming an Apollonian těsnění, také známý jako a Leibniz packing nebo Apollonian packing.[55] This gasket is a fraktální, being self-similar and having a dimenze d that is not known exactly but is roughly 1.3,[56] which is higher than that of a pravidelný (nebo napravitelný ) curve (d = 1) but less than that of a plane (d = 2). The Apollonian gasket was first described by Gottfried Leibniz in the 17th century, and is a curved precursor of the 20th-century Sierpiński triangle.[57] The Apollonian gasket also has deep connections to other fields of mathematics; for example, it is the limit set of Kleinianské skupiny.[58]
The configuration of a circle tangent to čtyři circles in the plane has special properties, which have been elucidated by Larmor (1891)[59] and Lachlan (1893).[60] Such a configuration is also the basis for Caseyho věta,[17] itself a generalization of Ptolemaiova věta.[37]
The extension of Apollonius' problem to three dimensions, namely, the problem of finding a fifth sphere that is tangent to four given spheres, can be solved by analogous methods.[9] For example, the given and solution spheres can be resized so that one given sphere is shrunk to point while maintaining tangency.[38] Inversion in this point reduces Apollonius' problem to finding a plane that is tangent to three given spheres. There are in general eight such planes, which become the solutions to the original problem by reversing the inversion and the resizing. This problem was first considered by Pierre de Fermat,[61] and many alternative solution methods have been developed over the centuries.[62]
Apollonius' problem can even be extended to d dimensions, to construct the hypersféry tangent to a given set of d + 1 hyperspheres.[41] Following the publication of Frederick Soddy 's re-derivation of the Descartes theorem in 1936, several people solved (independently) the mutually tangent case corresponding to Soddy's circles in d rozměry.[63]
Aplikace
The principal application of Apollonius' problem, as formulated by Isaac Newton, is hyperbolic trilateration, which seeks to determine a position from the rozdíly in distances to at least three points.[8] For example, a ship may seek to determine its position from the differences in arrival times of signals from three synchronized transmitters. Solutions to Apollonius' problem were used in první světová válka to determine the location of an artillery piece from the time a gunshot was heard at three different positions,[9] and hyperbolic trilateration is the principle used by the Systém Decca Navigator a LORAN.[7] Similarly, the location of an aircraft may be determined from the difference in arrival times of its transpondér signal at four receiving stations. Tento multilaterace problem is equivalent to the three-dimensional generalization of Apollonius' problem and applies to globální navigační satelitní systémy (vidět GPS#Geometric interpretation ).[31] It is also used to determine the position of calling animals (such as birds and whales), although Apollonius' problem does not pertain if the rychlost zvuku varies with direction (i.e., the přenosové médium ne izotropní ).[64]
Apollonius' problem has other applications. In Book 1, Proposition 21 in his Principia, Isaac Newton used his solution of Apollonius' problem to construct an orbit in nebeská mechanika from the center of attraction and observations of tangent lines to the orbit corresponding to instantaneous rychlost.[9] The special case of the problem of Apollonius when all three circles are tangent is used in the Hardy – Littlewoodova kruhová metoda z analytická teorie čísel konstruovat Hans Rademacher 's contour for complex integration, given by the boundaries of an nekonečná sada z Ford circles each of which touches several others.[65] Finally, Apollonius' problem has been applied to some types of problémy s balením, which arise in disparate fields such as the kódy opravující chyby použitý na DVD and the design of pharmaceuticals that bind in a particular enzym of a pathogenic bakterie.[66]
Viz také
- Apolloniův bod
- Apollóniova věta
- Isodynamic point trojúhelníku
Reference
- ^ A b C d E Dörrie H (1965). "The Tangency Problem of Apollonius". 100 velkých problémů elementární matematiky: jejich historie a řešení. New York: Dover. pp. 154–160 (§32).
- ^ A b C d E Coxeter HSM (1 January 1968). "The Problem of Apollonius". Americký matematický měsíčník. 75 (1): 5–15. doi:10.2307/2315097. ISSN 0002-9890. JSTOR 2315097.
- ^ A b Coolidge JL (1916). Pojednání o kruhu a sféře. Oxford: Clarendon Press. str.167 –172.
- ^ A b C Coxeter HSM, Greitzer SL (1967). Geometrie Revisited. Washington: MAA. ISBN 978-0-88385-619-2.
- ^ Coxeter, HSM (1969). Úvod do geometrie (2. vyd.). New York: Wiley. ISBN 978-0-471-50458-0.
- ^ Needham, T (2007). Vizuální komplexní analýza. New York: Oxford University Press. str.140 –141. ISBN 978-0-19-853446-4.
- ^ A b Hofmann-Wellenhof B, Legat K, Wieser M, Lichtenegger H (2003). Navigation: Principles of Positioning and Guidance. Springer. ISBN 978-3-211-00828-7.
- ^ A b Schmidt, RO (1972). "A new approach to geometry of range difference location". Transakce IEEE na letectví a elektronických systémech. AES-8 (6): 821–835. Bibcode:1972ITAES...8..821S. doi:10.1109/TAES.1972.309614. S2CID 51648067.
- ^ A b C d E F G Althiller-Court N (1961). "The problem of Apollonius". Učitel matematiky. 54: 444–452.
- ^ Gabriel-Marie F (1912). Exercices de géométrie, comprenant l'exposé des méthodes géométriques et 2000 questions résolues (francouzsky). Prohlídky: Maison A. Mame et Fils. str.cc=umhistmath, rgn=full%20text, idno=ACV3924.0001.001, didno=ACV3924.0001.001, view=pdf, seq=00000048 18–20, cc=umhistmath, rgn=full%20text, idno=ACV3924.0001.001, didno=ACV3924.0001.001, view=pdf, seq=00000703 673–677.
- ^ A b Pappus (1876). F Hultsch (ed.). Pappi Alexandrini collectionis quae supersunt (in Latin) (3 volumes ed.).
- ^ A b C d E F G Bruen A, Fisher JC, Wilker JB (1983). "Apollonius by Inversion". Matematický časopis. 56 (2): 97–103. doi:10.2307/2690380. JSTOR 2690380.
- ^ A b van Roomen A (1596). Problema Apolloniacum quo datis tribus circulis, quaeritur quartus eos contingens, antea a…Francisco Vieta…omnibus mathematicis…ad construendum propositum, jam vero per Belgam…constructum (v latině). Würzburg: Typis Georgii Fleischmanni. (v latině)
- ^ A b Newton I (1974). DT Whiteside (ed.). Matematické noviny Isaaca Newtona, svazek VI: 1684–1691. Cambridge: Cambridge University Press. p. 164. ISBN 0-521-08719-8.
- ^ A b Newton I. (1687). Philosophiæ Naturalis Principia Mathematica. Kniha I, Oddíl IV, Lemma 16.
- ^ Newton I. (1974). DT Whiteside (ed.). Matematické noviny Isaaca Newtona, svazek VI: 1684–1691. Cambridge: Cambridge University Press. 162–165, 238–241. ISBN 0-521-08719-8.
- ^ A b Casey J (1886) [1881]. Pokračování prvních šesti knih Prvků Euklida. Hodges, Figgis & spol. p. 122. ISBN 978-1-4181-6609-0.
- ^ Courant R, Robbins H (1943). Co je to matematika? Základní přístup k myšlenkám a metodám. London: Oxford University Press. str. 125–127, 161–162. ISBN 0-19-510519-2.
- ^ Bold B (1982). Slavné problémy geometrie a jejich řešení. Dover Publications. str.29–30. ISBN 0-486-24297-8.
- ^ A b Viète F. (1600). „Apollonius Gallus. Seu, Exsuscitata Apolloni Pergæi Περι Επαφων Geometria“. In Frans van Schooten (ed.). Francisci Vietae Opera mathematica (v latině). ex officina B. et A. Elzeviriorum (Lugduni Batavorum) (zveřejněno 1646). 325–346. (v latině)
- ^ Boyer CB, Merzbach UC (1991). „Apollonius z Pergy“. Dějiny matematiky (2. vyd.). John Wiley & Sons, Inc. str.322. ISBN 0-471-54397-7.
- ^ Simson R. (1734) Matematická sbírka, svazek VII, s. 117.
Zeuthen HG (1886). Die Lehre von den Kegelschnitten im Altertum (v němčině). Kodaň: Neznámý. 381–383.
Heath TL. A History of Greek Mathematics, Volume II: From Aristarchus to Diophantus. Oxford: Clarendon Press. 181–185, 416–417. - ^ Poncelet J-V (Leden 1811). Msgstr "Řešení problémů plusieurs géométrie et mécanique". Korespondence sur l'École Impériale Polytechnique (francouzsky). 2 (3): 271–273.
- ^ A b Gergonne J. (1813–1814). „Recherche du cercle qui en touche trois autres sur une sphère“. Ann. Matematika. Pures Appl. (francouzsky). 4.
- ^ Petersen J. (1879). Metody a teorie řešení problémů geometrických konstrukcí aplikované na 410 problémů. Londýn: Sampson Low, Marston, Searle & Rivington. str. 94–95 (příklad 403).
- ^ A b C d E Zlobec BJ, Kosta NM (2001). „Konfigurace cyklů a Apollónův problém“. Rocky Mountain Journal of Mathematics. 31 (2): 725–744. doi:10.1216 / rmjm / 1020171586.
- ^ Euler L. (1790). „Solutio facilis problematis, quo quaeritur circulus, qui datos tres circlos tangat“ (PDF). Nova Acta Academiae Scientiarum Imperialis Petropolitinae (v latině). 6: 95–101. Přetištěno v Eulerově Opera Omnia, řada 1, svazek 26, str. 270–275.
- ^ A b Gauss CF (1873). Werke, 4. pásmo (v němčině) (dotisk v roce 1973 Georg Olms Verlag (Hildesheim) ed.). Göttingen: Königlichen Gesellschaft der Wissenschaften. 399–400. ISBN 3-487-04636-9.
- ^ Carnot L. (1801). De la corrélation dans les Figures de géométrie (francouzsky). Paříž: Neznámý vydavatel. str. č. 158–159.
Carnot L. (1803). Géométrie de position (francouzsky). Paříž: Neznámý vydavatel. 390, § 334. - ^ Cauchy AL (Červenec 1806). "Du cercle tangent à trois cercles donnés". Korespondence sur l'École Polytechnique (francouzsky). 1 (6): 193–195.
- ^ A b Hoshen J (1996). „Rovnice GPS a problém Apollónia“. Transakce IEEE na letectví a elektronických systémech. 32 (3): 1116–1124. Bibcode:1996ITAES..32.1116H. doi:10.1109/7.532270. S2CID 30190437.
- ^ A b C Altshiller-Court N (1952). College Geometry: An Introduction to the Modern Geometry of the Triangle and the Circle (2. vydání, přepracované a rozšířené vydání). New York: Barnes a Noble. str. 222–227. ISBN 978-0-486-45805-2.
Hartshorne, Robine (2000). Geometry: Euclid and Beyond. New York: Springer Verlag. str.346 –355, 496, 499. ISBN 978-0-387-98650-0.
Rouché, Eugène; Ch de Comberousse (1883). Traité de géométrie (ve francouzštině) (5. vydání, přepracované a rozšířené vydání). Paříž: Gauthier-Villars. str. 252–256. OCLC 252013267. - ^ Coaklay GW (1860). „Analytické řešení deseti problémů v tangenciách kruhů; a také patnáct problémů v tangenciách sfér“. Matematický měsíčník. 2: 116–126.
- ^ A b Pedoe D (1970). "Chybějící sedmý kruh". Elemente der Mathematik. 25: 14–15.
- ^ A b Knight RD (2005). "Apolloniův kontaktní problém a ležova geometrie kontaktu". Journal of Geometry. 83 (1–2): 137–152. doi:10.1007 / s00022-005-0009-x. S2CID 122228528.
- ^ Losos G (1879). Pojednání o kónických řezech, obsahující popis nejdůležitějších moderních algebraických a geometrických metod. London: Longmans, Green and Co., str. 110–115, 291–292. ISBN 0-8284-0098-9.
- ^ A b C Johnson RA (1960). Advanced Euclidean Geometry: Elementární pojednání o geometrii trojúhelníku a kruhu (dotisk vydání z roku 1929 Houghton Mifflin ed.). New York: Dover Publications. str. 117–121 (Apolloniův problém), 121–128 (Caseyho a Hartovy věty). ISBN 978-0-486-46237-0.
- ^ A b C Ogilvy, C. S. (1990). Exkurze v geometrii. Doveru. str.48–51 (Apolloniův problém), 60 (rozšíření k tečnám). ISBN 0-486-26530-7.
- ^ Eisenbud, David a Harris, Joe, 3264 a All That: Druhý kurz v algebraické geometrii. Cambridge University Press, 2016. ISBN 978-1107602724. str. 66–68.
- ^ Milorad R. Stevanovic, Predrag B. Petrovic a Marina M. Stevanovic, „Poloměry kruhů v Apollóniově problému“, Fórum Geometricorum 17 (2017), 359–372: Theorem 1. http://forumgeom.fau.edu/FG2017volume17/FG201735.pdf
- ^ A b Dreschler K, Sterz U (1999). „Apolloniův kontaktní problém v n-prostor s ohledem na výčtovou geometrii ". Acta Mathematica Universitatis Comenianae. 68 (1): 37–47.
- ^ Muirhead RF (1896). „O počtu a povaze řešení problému Apollonian Contact“. Proceedings of the Edinburgh Mathematical Society. 14: 135–147, přiložené obrázky 44–114. doi:10.1017 / S0013091500031898.
- ^ A b Stoll V (1876). „Zum Problem des Apollonius“. Mathematische Annalen (v němčině). 6 (4): 613–632. doi:10.1007 / BF01443201. S2CID 120097802.
- ^ Studie E (1897). „Das Apollonische Problem“. Mathematische Annalen (v němčině). 49 (3–4): 497–542. doi:10.1007 / BF01444366. S2CID 120984176.
- ^ Fitz-Gerald JM (1974). „Poznámka k problému Apollónia“. Journal of Geometry. 5: 15–26. doi:10.1007 / BF01954533. S2CID 59444157.
- ^ Eppstein D (1. ledna 2001). "Tangens Spheres and Triangle Centers". Americký matematický měsíčník. 108 (1): 63–66. arXiv:matematika / 9909152. doi:10.2307/2695679. ISSN 0002-9890. JSTOR 2695679. S2CID 14002377.
- ^ Oldknow A (1. dubna 1996). „Euler – Gergonne – Soddyův trojúhelník trojúhelníku“. Americký matematický měsíčník. 103 (4): 319–329. doi:10.2307/2975188. ISSN 0002-9890. JSTOR 2975188.
Weisstein, EW. „Problém se čtyřmi mincemi“. MathWorld. Citováno 2008-10-06. - ^ Descartes R., Œuvres de Descartes, korespondence IV, (C. Adam and P. Tannery, Eds.), Paříž: Leopold Cert 1901. (francouzsky)
- ^ A b Beecroft H (1842). "Vlastnosti kruhů ve vzájemném kontaktu". Dámský a džentlmenský deník. 139: 91–96.
Beecroft H (1846). "Neznámý název". Dámský a džentlmenský deník: 51. (MathWords online článek Archivováno 2008-01-18 na Wayback Machine ) - ^ A b Steiner J (1826). „Einige geometrische Betrachtungen“. Journal für die reine und angewandte Mathematik. 1: 161–184, 252–288. doi:10.1515 / crll.1826.1.161. S2CID 122065577.
- ^ Soddy F (20. června 1936). „The Kiss Precise“. Příroda. 137 (3477): 1021. Bibcode:1936Natur.137.1021S. doi:10.1038 / 1371021a0.
- ^ Pedoe D (1. června 1967). "O větě o geometrii". Amer. Matematika. Měsíční. 74 (6): 627–640. doi:10.2307/2314247. ISSN 0002-9890. JSTOR 2314247.
- ^ Carnot L. (1803). Géométrie de position. Paříž: Neznámý vydavatel. 415, § 356.
- ^ Vannson (1855). „Contact des cercles sur la sphère, par la geométrie“. Nouvelles Annales de Mathématiques (francouzsky). XIV: 55–71.
- ^ Kasner E, Supnick F (prosinec 1943). „Apollonian Packing of Circles“. Proc. Natl. Acad. Sci. USA. 29 (11): 378–384. Bibcode:1943PNAS ... 29..378K. doi:10.1073 / pnas.29.11.378. ISSN 0027-8424. PMC 1078636. PMID 16588629.
- ^ Boyd DW (1973). "Vylepšené hranice pro konstanty balení disku". Aequationes Mathematicae. 9: 99–106. doi:10.1007 / BF01838194. S2CID 121089590.
Boyd DW (1973). „Zbytková dimenze apollonského obalu“. Mathematika. 20 (2): 170–174. doi:10.1112 / S0025579300004745.
McMullen, Curtis T (1998). „Hausdorffova dimenze a konformní dynamika III: Výpočet dimenze“ (PDF). American Journal of Mathematics. 120 (4): 691–721. doi:10.1353 / ajm.1998.0031. S2CID 15928775. - ^ Mandelbrot B (1983). Fraktální geometrie přírody. New York: W. H. Freeman. p.170. ISBN 978-0-7167-1186-5.
Aste T, Weaire D (2008). Snaha o dokonalé zabalení (2. vyd.). New York: Taylor a Francis. str. 131–138. ISBN 978-1-4200-6817-7. - ^ Mumford D, Series C, Wright D (2002). Indra's Pearls: The Vision of Felix Klein. Cambridge: Cambridge University Press. str.196 –223. ISBN 0-521-35253-3.
- ^ Larmor A (1891). „Kontakty soustav kruhů“. Proceedings of the London Mathematical Society. 23: 136–157. doi:10.1112 / plms / s1-23.1.135.
- ^ Lachlan R (1893). Základní pojednání o moderní čisté geometrii. Londýn: Macmillan. s. § 383–396, s. 244–251. ISBN 1-4297-0050-5.
- ^ de Fermat P, Varia opera mathematica, str. 74, Tolos, 1679.
- ^ Euler L. (1810). „Solutio facilis problematis, quo quaeritur sphaera, quae datas quatuor sphaeras utcunque dispositas contingat“ (PDF). Mémoires de l'Académie des Sciences de St.-Pétersbourg (v latině). 2: 17–28. Přetištěno v Eulerově Opera Omnia, řada 1, svazek 26, s. 334–343.
Carnot L. (1803). Géométrie de position (francouzsky). Paris: Imprimerie de Crapelet, chez J. B. M. Duprat. str.357, §416.
Hachette JNP (Září 1808). „Sur le contact des sphères; sur la sphère tangente à quatre sphères données; sur le cercle tangent à trois cercles donnés“. Korespondence sur l'École Polytechnique (francouzsky). 1 (2): 27–28.
Français J (leden 1810). „De la sphère tangente à quatre sphères données“. Korespondence sur l'École Impériale Polytechnique (francouzsky). 2 (2): 63–66.
Français J (leden 1813). „Řešení analytických problémů při řešení problémů se čtyřmi způsoby řešení“. Korespondence sur l'École Impériale Polytechnique (francouzsky). 2 (5): 409–410.
Dupin C. (Leden 1813). „Mémoire sur les sphères“. Korespondence sur l'École Impériale Polytechnique (francouzsky). 2 (5): 423.
Reye T (1879). Synthetische Geometrie der Kugeln (PDF) (v němčině). Lipsko: B. G. Teubner.
Serret JA (1848). „De la sphère tangente à quatre sphères donnèes“. Journal für die reine und angewandte Mathematik. 37: 51–57. doi:10.1515 / crelle-1848-18483704. S2CID 201061558.
Coaklay GW (1859–1860). „Analytické řešení deseti problémů v tangenciách kruhů; a také patnáct problémů v tangenciách sfér“. Matematický měsíčník. 2: 116–126.
Alvord B (1. ledna 1882). "Průnik kruhů a průnik koulí". American Journal of Mathematics. 5 (1): 25–44, se čtyřmi stránkami obrázků. doi:10.2307/2369532. ISSN 0002-9327. JSTOR 2369532. - ^ Gossett T (1937). „The Kiss Precise“. Příroda. 139 (3506): 62. Bibcode:1937Natur.139Q..62.. doi:10.1038 / 139062a0.
- ^ Spiesberger, JL (2004). "Geometrie lokalizace zvuků z rozdílů v době cestování: Isodiachrony". Journal of Acoustical Society of America. 116 (5): 3168–3177. Bibcode:2004ASAJ..116,3168S. doi:10.1121/1.1804625. PMID 15603162.
- ^ Apostol TM (1990). Modulární funkce a Dirichletovy řady v teorii čísel (2. vyd.). New York: Springer-Verlag. ISBN 978-0-387-97127-8.
- ^ Lewis RH, Bridgett S (2003). "Kónické tangenciální rovnice a Apollóniovy problémy v biochemii a farmakologii". Matematika a počítače v simulaci. 61 (2): 101–114. CiteSeerX 10.1.1.106.6518. doi:10.1016 / S0378-4754 (02) 00122-2.
Další čtení
- Boyd, DW (1973). "Oscilační obal trojrozměrné koule". Kanadský žurnál matematiky. 25 (2): 303–322. doi:10.4153 / CJM-1973-030-5.
- Callandreau, Édouard (1949). Célèbres problèmes mathématiques (francouzsky). Paříž: Albin Michel. 219–226. OCLC 61042170.
- Camerer, JG (1795). Apollonii de Tactionibus, quae supersunt, ac maxime lemmata Pappi, in hos libros Graece nunc primum edita, e codicibus manuscriptis, cum Vietae librorum Apollonii restitutione, adjectis Pozorováníibus, computationibus, ac problematis Apolloniani historia (v latině). Gothae: Ettinger.
- Gisch D, Ribando JM (2004). „Apollónův problém: Studie řešení a jejich spojení“ (PDF). Americký žurnál vysokoškoláckého výzkumu. 3: 15–25. doi:10.33697 / ajur.2004.010.
- Pappus Alexandrijský (1933). Pappus d'Alexandrie: La collection mathématique (francouzsky). Paříž. OCLC 67245614. Trans., Introd. A poznámky Paula Ver Eecke.
- Simon, M (1906). Über die Entwicklung der Elementargeometrie im XIX. Jahrhundert (v němčině). Berlín: Teubner. 97–105.
- Wells, D (1991). Slovník tučňáků zvědavé a zajímavé geometrie. New York: Penguin Books. str.3–5. ISBN 0-14-011813-6.
externí odkazy
- „Zeptejte se řešení Dr.. Mathforum. Citováno 2008-05-05.
- Weisstein, Eric W. „Apollónův problém“. MathWorld.
- „Apollónův problém“. Cut The Knot. Citováno 2008-05-05.
- Kunkel, Paul. "Tangens Circles". Whistler Alley. Citováno 2008-05-05.
- Austin, David (březen 2006). „Když líbání zahrnuje trigonometrii“. Sloupec prvků na webových stránkách Americké matematické společnosti. Citováno 2008-05-05.