Rovnoběžník síly - Parallelogram of force
The rovnoběžník sil je metoda pro řešení (nebo vizualizaci) výsledků aplikace dvou síly k objektu.

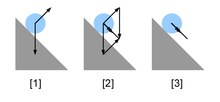
Jsou-li zapojeny více než dvě síly, geometrie již není rovnoběžníková, ale platí stejné zásady. Síly, bytí vektory jsou dodržovány zákony vektorové přidání, a tak lze celkovou (výslednou) sílu způsobenou působením řady sil najít geometricky nakreslením vektorových šipek pro každou sílu. Například viz obrázek 1. Tato konstrukce má stejný výsledek jako pohyb F2 takže jeho ocas se shoduje s hlavou F1a vezmeme čistou sílu jako vektor spojující ocas F1 do čela F2. Tento postup lze pro přidání opakovat F3 k výslednici F1 + F2, a tak dále.
Newtonův důkaz

Předběžné: paralelogram rychlosti
Předpokládejme, že částice pohybuje se rovnoměrnou rychlostí podél čáry z A do B (obrázek 2) v daném čase (řekněme jeden) druhý ), zatímco ve stejnou dobu se čára AB pohybuje rovnoměrně ze své polohy v AB do polohy v DC, přičemž zůstává po celou dobu rovnoběžná s původní orientací. Podle obou pohybů sleduje částice přímku AC. Protože posunutí v daném čase je měřítkem rychlost, délka AB je míra rychlosti částice podél AB, délka AD je míra rychlosti čáry podél AD a délka AC je míra rychlosti částice podél AC. Pohyb částice je stejný, jako kdyby se pohybovala jedinou rychlostí podél AC.[1]
Newtonův důkaz paralelogramu síly
Předpokládejme dva síly jednat o částice u původu ("ocasy" vektory ) na obrázku 1. Nechte délky vektorů F1 a F2 představují rychlosti tyto dvě síly mohly v částici působením působit po danou dobu a nechat směr každé z nich představovat směr, ve kterém působí. Každá síla působí nezávisle a bude produkovat svoji konkrétní rychlost bez ohledu na to, zda druhá síla působí nebo ne. Na konci daného času má částice oba rychlosti. Podle výše uvedeného důkazu jsou ekvivalentní jediné rychlosti, Fsíť. Podle Newtonův druhý zákon, tento vektor je také měřítkem síly, která by produkovala tuto rychlost, takže tyto dvě síly jsou ekvivalentní jediné síle.[2]
Bernoulliho důkaz pro kolmé vektory
Modelujeme síly jako euklidovské vektory nebo členy . Náš první předpoklad je, že výslednice dvou sil je ve skutečnosti další síla, takže pro jakékoli dvě síly existuje další síla Náš konečný předpoklad je, že výslednice dvou sil se při otáčení nemění. Li je libovolná rotace (libovolná ortogonální mapa pro obvyklou strukturu vektorového prostoru z s ), pak pro všechny síly






Uvažujme dvě kolmé síly délky a délky , s je délka .Nechat a , kde je rotace mezi a , tak . Pod invariancí rotace dostaneme











Podobně zvažte další dvě síly a . Nechat být rotací z na : , který inspekcí dělá .







Použití těchto dvou rovnic

Od té doby a oba leží vedle sebe , jejich délky jsou stejné




což z toho vyplývá má délku , což je délka . Tedy pro případ, kdy a jsou kolmé, . Při kombinaci našich dvou sad pomocných sil jsme však použili asociativitu . Pomocí tohoto dalšího předpokladu vytvoříme další důkaz níže.[3][4]





Algebraický důkaz paralelogramu síly
Modelujeme síly jako euklidovské vektory nebo členy . Náš první předpoklad je, že výslednice dvou sil je ve skutečnosti další síla, takže pro jakékoli dvě síly existuje další síla . Předpokládáme komutativitu, protože to jsou síly aplikované současně, takže na pořadí by nemělo záležet .

Zvažte mapu

Li je asociativní, pak bude tato mapa lineární. Protože také posílá na a na , musí to být také mapa identity. Tím pádem musí být ekvivalentní normálnímu operátoru přidání vektoru.[3][5]


Kontroverze
Matematický důkaz paralelogramu síly není obecně přijímán jako matematicky platný. Byly vyvinuty různé důkazy (hlavně Duchayla a Poissonovo ), a to také způsobilo námitky. Že paralelogram síly byl pravdivý, nebylo zpochybňováno, ale proč byla to pravda. Paralelogram síly je dnes přijímán jako empirický fakt, který nelze redukovat na Newtonovy první principy.[3] [6]
Viz také
- Newton Matematické principy přírodní filozofie„Axiomy nebo zákony pohybu, dodatek I, na Wikisource
- Vektor (geometrický)
- Čistá síla
Reference
- ^ Routh, Edward John (1896). Pojednání o analytické statice. Cambridge University Press. p.6., na Knihy Google
- ^ Routh (1896), str. 14
- ^ A b C Spivak, Michael (2010). Mechanika I. Fyzika pro matematiky. Publish nebo Perish, Inc. str. 278–282. ISBN 0-914098-32-2.
- ^ Bernoulli, Daniel (1728). Zkoumat principiorum mechanicae et demonstrationes geometricae depositione et Resolutione virium.
- ^ Mach, Ernest (1974). Věda o mechanice. Open Court Publishing Co. str. 55–57.
- ^ Lange, Marc (2009). „Příběh dvou vektorů“ (PDF). Dialectica, 63. 397–431.