Dva různé 3d
ortonormální základy: každý základ se skládá z jednotkových vektorů, které jsou vzájemně kolmé.
v geometrie a lineární algebra, a Kartézský tenzor používá ortonormální základ na zastupovat A tenzor v Euklidovský prostor ve formě komponent. Konverze tenzorových komponent z jednoho takového základu na jiný se provádí pomocí ortogonální transformace.
Nejznámějšími souřadnicovými systémy jsou dvourozměrný a trojrozměrný Kartézská souřadnice systémy. Kartézské tenzory lze použít s jakýmkoli euklidovským prostorem, nebo techničtěji s jakýmkoli konečným rozměrem vektorový prostor přes pole z reálná čísla který má vnitřní produkt.
K použití kartézských tenzorů dochází v fyzika a inženýrství, například s Cauchyho tenzor napětí a moment setrvačnosti tenzor dovnitř tuhá dynamika těla. Někdy obecné křivočaré souřadnice jsou pohodlné, jako při vysoké deformaci mechanika kontinua, nebo dokonce nezbytné, jako v obecná relativita. Zatímco u některých takových souřadnicových systémů (např. tečna na sférické souřadnice ), Kartézské tenzory mohou poskytnout značné zjednodušení pro aplikace, ve kterých stačí rotace přímých souřadnicových os. Transformace je a pasivní transformace, protože se mění souřadnice a ne fyzický systém.
Kartézský základ a související terminologie
Vektory ve třech rozměrech
v 3d Euklidovský prostor, ℝ3, standardní základ je EX, Ey, Ez. Každý základní vektor ukazuje podél os x, y a z a vektory jsou všechny jednotkové vektory (nebo normalizováno), takže základ je ortonormální.
Skrz, když se odkazuje na Kartézské souřadnice v tři rozměry, předpokládá se pravostranný systém, což je v praxi mnohem častější než levostranný systém, viz orientace (vektorový prostor) pro detaily.
Pro kartézské tenzory řádu 1 je kartézský vektor A lze zapsat algebraicky jako a lineární kombinace základních vektorů EX, Ey, Ez:

Kde souřadnice vektoru vzhledem k karteziánské bázi jsou označeny AX, Ay, Az. Je běžné a užitečné zobrazovat základní vektory jako vektory sloupců

když máme vektor souřadnic ve vektorové reprezentaci sloupce:

A řádek vektor reprezentace je také legitimní, i když v kontextu obecných křivočarých souřadnicových systémů se vektorová reprezentace řádků a sloupců používá ze zvláštních důvodů samostatně - viz Einsteinova notace a kovariance a kontravariance vektorů proč.
Termín „složka“ vektoru je nejednoznačný: může odkazovat na:
- konkrétní souřadnice vektoru, jako je Az (skalární) a podobně pro X a ynebo
- souřadnice skalárního násobení odpovídajícího základního vektoru, v tomto případě "y-složka" z A je AyEy (vektor) a podobně pro X a z.
Obecnější notace je notace tenzorového indexu, který má flexibilitu číselných hodnot spíše než pevné popisky souřadnic. Kartézské štítky jsou nahrazeny tenzorovými indexy v základních vektorech EX ↦ E1, Ey ↦ E2, Ez ↦ E3 a souřadnice AX ↦ A1, Ay ↦ A2, Az ↦ A3. Obecně platí, že notace E1, E2, E3 odkazuje na žádný základ, a A1, A2, A3 odkazuje na odpovídající souřadnicový systém; i když zde jsou omezeny na kartézský systém. Pak:

Je standardní používat Einsteinova notace —Známka součtu pro součet nad indexem, který je v termínu přítomen přesně dvakrát, může být kvůli notační stručnosti potlačena:

Výhodou indexové notace oproti specifickým souřadnicím je nezávislost dimenze podkladového vektorového prostoru, tj. Stejný výraz na pravé straně má stejnou formu ve vyšších dimenzích (viz níže). Dříve byly kartézské štítky x, y, z pouze štítky a ne indexy. (Je neformální říkat „i = x, y, z ").
Tenzory druhého řádu ve třech rozměrech
A dyadický tenzor T je tenzor řádu 2 tvořený tenzorový produkt ⊗ dvou kartézských vektorů A a b, psaný T = A ⊗ b. Analogicky k vektorům jej lze zapsat jako lineární kombinaci tenzorové báze EX ⊗ EX ≡ Exx, EX ⊗ Ey ≡ Exy, ..., Ez ⊗ Ez ≡ Ezz (pravá strana každé identity je pouze zkratka, nic víc):

Představující každý základní tenzor jako matici:

pak T lze systematičtěji reprezentovat jako matici:

Vidět násobení matic pro notační korespondenci mezi maticemi a tečkovými a tenzorovými produkty.
Obecněji, ať už či nikoli T je tenzorový produkt dvou vektorů, je to vždy lineární kombinace základních tenzorů se souřadnicemi Txx, Txy, ... Tzz:

zatímco z hlediska tenzorových indexů:

a v maticové formě:

Tenzory druhého řádu se přirozeně vyskytují ve fyzice a inženýrství, když mají fyzikální veličiny v systému směrovou závislost, často způsobem „stimul-odezva“. To lze matematicky vidět prostřednictvím jednoho aspektu tenzorů - jsou multilineární funkce. Tenzor druhého řádu T který přijímá vektor u nějaké velikosti a směru vrátí vektor proti; jiné velikosti a jiným směrem u, obecně. Použitá notace pro funkce v matematická analýza nás vede k psaní proti = T(u),[1] zatímco stejnou myšlenku lze vyjádřit v maticových a indexových zápisech[2] (včetně konvence sčítání):

„Lineárním“, pokud u = ρr + σs pro dva skaláry ρ a σ a vektory r a s, pak ve funkčních a indexových notacích:


a podobně pro maticovou notaci. Funkce, matice a indexové zápisy znamenají totéž. Formuláře matice poskytují jasné zobrazení komponent, zatímco indexová forma umožňuje snadnější tenzor-algebraickou manipulaci se vzorci kompaktním způsobem. Oba poskytují fyzickou interpretaci Pokyny; vektory mají jeden směr, zatímco tenzory druhého řádu spojují dva směry dohromady. Lze spojit tenzorový index nebo souřadnicový štítek se základním vektorovým směrem.
Použití tenzorů druhého řádu je minimální pro popis změn ve velikostech a směrech vektorů, jako Tečkovaný produkt dvou vektorů je vždy skalární, zatímco křížový produkt dvou vektorů je vždy pseudovektor kolmý na rovinu definovanou vektory, takže tyto produkty vektorů samy o sobě nemohou získat nový vektor jakékoli velikosti v žádném směru. (Další informace o bodových a křížových produktech najdete níže.) Tenzorový produkt dvou vektorů je tenzor druhého řádu, i když to samo o sobě nemá zjevnou směrovou interpretaci.
Předchozí myšlenka může pokračovat: pokud T vezme dva vektory p a q, vrátí skalární r. V zápisu funkcí píšeme r = T(p, q), zatímco v maticovém a indexovém zápisu (včetně konvence sčítání):

Tenzor T je lineární v obou vstupních vektorech. Když jsou vektory a tenzory psány bez odkazu na komponenty a indexy se nepoužívají, někdy se umístí tečka · tam, kde součty nad indexy (známé jako tenzorové kontrakce ) jsou převzaty. Pro výše uvedené případy:[1][2]


motivováno notací produktu:

Obecněji tenzor řádu m který přijímá n vektory (kde n je mezi 0 a m včetně) vrátí tenzor objednávky m − nviz Tensor: Jako multilineární mapy pro další zobecnění a podrobnosti. Výše uvedené pojmy platí také pro pseudovektory stejným způsobem jako pro vektory. Samotné vektory a tenzory se mohou v celém prostoru lišit, v takovém případě máme vektorová pole a tenzorová pole, a může také záviset na čase.
Následuje několik příkladů:
Pro příklad elektrického vedení by indexové a maticové notace byly:


zatímco pro kinetickou energii rotace T:


Viz také konstitutivní rovnice pro více specializované příklady.
Vektory a tenzory v n rozměry
v n-dimenzionální euklidovský prostor nad reálnými čísly, ℝn, je označen standardní základ E1, E2, E3, ... En. Každý základní vektor Ei body podél pozitivního Xi osa, přičemž základem je ortonormální. Součástka j z Ei je dán Kroneckerova delta:

Vektor v ℝn má formu:

Podobně pro řád 2 tensor výše, pro každý vektor A a b v ℝn:

nebo obecněji:

Transformace kartézských vektorů (libovolný počet rozměrů)
Význam "invariance" pod transformacemi souřadnic
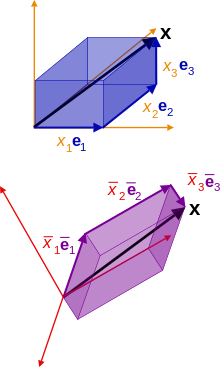
The vektor polohy X v ℝn je jednoduchý a běžný příklad vektoru a lze jej reprezentovat v žádný souřadnicový systém. Zvažte případ pravoúhlé souřadnicové systémy pouze s ortonormálními základy. Je možné mít souřadný systém s obdélníkovou geometrií, pokud jsou základní vektory vzájemně kolmé a nejsou normalizovány, v takovém případě je základna ortogonal ale ne orthonormální. S ortonormálními bázemi se však manipuluje snadněji a v praxi se často používají. Následující výsledky platí pro ortonormální báze, ne pro ortogonální.
V jednom pravoúhlém souřadnicovém systému X protože kontraktor má souřadnice Xi a základní vektory Ei, zatímco jako covector má souřadnice Xi a základní vektory Eia máme:

V jiném pravoúhlém souřadnicovém systému X protože kontraktor má souřadnice Xi a základny Ei, zatímco jako covector má souřadnice Xi a základny Eia máme:

Každá nová souřadnice je funkcí všech těch starých a naopak pro inverzní funkce:


a podobně každý nový základový vektor je funkcí všech starých a naopak pro inverzní funkci:


pro všechny i, j.
Vektor je neměnný při jakékoli změně základny, takže pokud se souřadnice transformují podle a transformační matice Lse základy transformují podle inverzní matice L−1, a naopak, pokud se souřadnice transformují podle inverze L−1se základy transformují podle matice L. Rozdíl mezi každou z těchto transformací je konvenčně zobrazen prostřednictvím indexů jako horních indexů pro kontrarariance a dolních indexů pro kovarianci a souřadnice a báze jsou lineárně transformovány podle následujících pravidel:
| Vektorové prvky | Protikladný zákon transformace | Kovovariantní transformační zákon |
|---|
| Souřadnice |  |  |
|---|
| Základ |  |  |
|---|
| Libovolný vektor |  |  |
|---|
kde Lij představuje položky transformační matice (číslo řádku je i a číslo sloupce je j) a (L−1)ik označuje položky inverzní matice matice Lik.
Li L je ortogonální transformace (ortogonální matice ), jsou ním transformované objekty definovány jako Kartézské tenzory. Toto geometricky má interpretaci, že obdélníkový souřadný systém je mapován na jiný obdélníkový souřadný systém, ve kterém norma vektoru X je zachována (a vzdálenosti jsou zachovány).
The určující z L je det (L) = ± 1, což odpovídá dvěma typům ortogonální transformace: (+1) pro rotace a (-1) pro nesprávné otáčení (počítaje v to odrazy ).
Existují značná algebraická zjednodušení maticová transpozice je inverzní z definice ortogonální transformace:

Z předchozí tabulky jsou ortogonální transformace covektorů a kontravektorů identické. Není třeba se mezi nimi lišit zvyšování a snižování indexů a v této souvislosti a aplikacích pro fyziku a inženýrství jsou indexy obvykle všechny indexovány, aby se odstranila záměna exponenty. Ve zbývající části tohoto článku budou všechny indexy sníženy. Skutečné zvýšené a snížené indexy lze určit podle toho, které veličiny jsou covektory nebo kontraktory, a podle příslušných pravidel transformace.
Přesně stejná pravidla transformace platí pro jakýkoli vektor A, nejen poziční vektor. Pokud jeho součásti Ai netransformujte podle pravidel, A není vektor.
I přes podobnost mezi výše uvedenými výrazy, pro změnu souřadnic jako např Xj = LijXia působení tenzoru na vektor jako bi = TijAj, L není tenzor, ale T je. Při změně souřadnic L je matice, sloužící k propojení dvou pravoúhlých souřadnicových systémů s ortonormálními bázemi dohromady. U tenzoru vztahujícího se k vektoru k vektoru patří vektory a tenzory v celé rovnici ke stejnému souřadnicovému systému a základně.
Deriváty a prvky Jacobovy matice
Záznamy z L jsou částečné derivace nových nebo starých souřadnic s ohledem na staré nebo nové souřadnice.
Diferenciace Xi s ohledem na Xk:

tak

je prvkem Jacobian matrix. Mezi pozicemi indexu je připojena (částečně mnemotechnická) korespondence L a v parciální derivaci: i nahoře a j dole, v každém případě, i když u kartézských tenzorů lze indexy snížit.
Naopak rozlišování Xj s ohledem na Xi:

tak

je prvek inverzní jakobiánské matice s podobnou indexovou korespondencí.
Mnoho zdrojů uvádí transformace z hlediska dílčích derivací:

a explicitní maticové rovnice v 3d jsou:


podobně pro

Projekce podél souřadnicových os

Horní: Úhly z Xi osy do Xi sekery. Dno: Naopak.
Stejně jako u všech lineárních transformací L záleží na zvoleném základě. Pro dva ortonormální základy

- promítání X do X sekery:

- promítání X do X sekery:

Proto se komponenty redukují na směrové kosiny mezi Xi a Xj sekery:


kde θij a θji jsou úhly mezi Xi a Xj sekery. Obecně, θij se nerovná θji, protože například θ12 a θ21 jsou dva různé úhly.
Transformaci souřadnic lze zapsat:

a rovnice explicitní matice v 3d jsou:

podobně pro
Geometrický výklad je Xi složky rovnající se součtu promítání Xj komponenty na Xj sekery.
Čísla Ei⋅Ej uspořádané do matice by vytvořilo a symetrická matice (matice rovnající se vlastní transpozici) kvůli symetrii v bodových produktech, ve skutečnosti je to metrický tenzor G. Naproti tomu Ei⋅Ej nebo Ei⋅Ej dělat ne tvoří symetrické matice obecně, jak je zobrazeno výše. Proto, zatímco L matice jsou stále ortogonální, nejsou symetrické.
Kromě rotace kolem kterékoli jedné osy, ve které Xi a Xi pro některé i shodovat, úhly nejsou stejné jako Eulerovy úhly, a tak L matice nejsou stejné jako rotační matice.
Transformace produktů tečka a kříž (pouze tři rozměry)
The Tečkovaný produkt a křížový produkt vyskytují se velmi často, například v aplikacích vektorové analýzy ve fyzice a inženýrství:
- Napájení přestoupil P objektem vyvíjejícím sílu F s rychlostí proti podél přímočaré cesty:






Jak se tyto produkty transformují při ortogonálních transformacích, je znázorněno níže.
Dotový produkt, delta Kronecker a metrický tenzor
The Tečkovaný produkt ⋅ každého možného párování základních vektorů vyplývá z toho, že základ je ortonormální. Pro kolmé páry máme

zatímco pro paralelní páry máme

Výměna kartézských štítků indexovou notací, jak je znázorněno výše, tyto výsledky lze shrnout do

kde δij jsou komponenty Kroneckerova delta. K reprezentaci lze použít kartézský základ δ Takto.
Kromě toho každý metrický tenzor součástka Gij s ohledem na jakýkoli základ je bodový produkt párování bazických vektorů:

Pro kartézský základ jsou komponenty uspořádané do matice:

tak jsou pro metrický tenzor nejjednodušší možné, jmenovitě δ:

Tohle je ne platí pro obecné základy: ortogonální souřadnice mít úhlopříčka metriky obsahující různé měřítkové faktory (tj. ne nutně 1), zatímco obecné křivočaré souřadnice může mít také nenulové hodnoty pro součásti mimo diagonální.
Tečkový produkt dvou vektorů A a b transformuje podle

což je intuitivní, protože bodový součin dvou vektorů je jeden skalární nezávisle na jakýchkoli souřadnicích. To platí obecněji pro všechny souřadnicové systémy, nejen pro pravoúhlé; bodový produkt v jednom souřadnicovém systému je stejný v jakémkoli jiném.
Kříž a produkt, symbol Levi-Civita a pseudovektory
Cyklické permutace hodnot indexu a pozitivně orientovaný kubický objem.
Anticyklické permutace hodnot indexu a záporně orientovaného kubického objemu.
Nenulové hodnoty parametru
Symbol Levi-Civita εijk jako hlasitost
Ei · Ej × Ek krychle překlenuté 3d ortonormálním základem.
Pro křížový produkt × dvou vektorů jsou výsledky (téměř) opačné. Opět, za předpokladu pravotočivého 3d kartézského souřadnicového systému, cyklické permutace v kolmých směrech se získá další vektor v cyklické sbírce vektorů:


zatímco paralelní vektory jasně zmizí:

a nahrazení kartézských štítků indexovou notací jako výše, lze je shrnout:

kde i, j, k jsou indexy, které nabývají hodnot 1, 2, 3. Z toho vyplývá, že:

Tyto permutační vztahy a jejich odpovídající hodnoty jsou důležité a existuje objekt shodující se s touto vlastností: Symbol Levi-Civita, označeno ε. Položky symbolu Levi-Civita mohou být reprezentovány kartézským základem:

který geometricky odpovídá objem a krychle překlenuto ortonormálními bazálními vektory se znaménkem orientace (a ne „kladný nebo záporný objem“). Zde je orientace fixována pomocí ε123 = +1, pro systém pro praváky. Systém pro leváky by to napravil ε123 = -1 nebo ekvivalentně ε321 = +1.
The skalární trojitý produkt nyní lze napsat:

with the geometric interpretation of volume (of the rovnoběžnostěn překlenul A, b, C) and algebraically is a určující:[3]

This in turn can be used to rewrite the křížový produkt of two vectors as follows:

Contrary to its appearance, the Levi-Civita symbol is not a tensor, ale a pseudotensor, the components transform according to:

Therefore, the transformation of the cross product of A a b je:

a tak A × b transforms as a pseudovector, because of the determinant factor.
The tensor index notation applies to any object which has entities that form vícerozměrná pole – not everything with indices is a tensor by default. Instead, tensors are defined by how their coordinates and basis elements change under a transformation from one coordinate system to another.
Note the cross product of two vectors is a pseudovector, while the cross product of a pseudovector with a vector is another vector.
Applications of the δ tensor and ε pseudotensor
Other identities can be formed from the δ tensor and ε pseudotensor, a notable and very useful identity is one that converts two Levi-Civita symbols adjacently contracted over two indices into an antisymmetrized combination of Kronecker deltas:

The index forms of the dot and cross products, together with this identity, greatly facilitate the manipulation and derivation of other identities in vector calculus and algebra, which in turn are used extensively in physics and engineering. For instance, it is clear the dot and cross products are distributive over vector addition:


without resort to any geometric constructions - the derivation in each case is a quick line of algebra. Although the procedure is less obvious, the vector triple product can also be derived. Rewriting in index notation:
![left[{mathbf {a}} imes ({mathbf {b}} imes {mathbf {c}})
ight]_{i}=varepsilon _{{ijk}}a_{j}(varepsilon _{{kell m}}b_{ell }c_{m})=(varepsilon _{{ijk}}varepsilon _{{kell m}})a_{j}b_{ell }c_{m}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4b9cde24704b0895884d8c931caa33fc38e87de0)
and because cyclic permutations of indices in the ε symbol does not change its value, cyclically permuting indices in εkℓm získat εℓmk allows us to use the above δ-ε identity to convert the ε symbols into δ tenzory:
![{�egin{aligned}left[{mathbf {a}} imes ({mathbf {b}} imes {mathbf {c}})
ight]_{i}&=(delta _{{iell }}delta _{{jm}}-delta _{{im}}delta _{{jell }})a_{j}b_{ell }c_{m}&=delta _{{iell }}delta _{{jm}}a_{j}b_{ell }c_{m}-delta _{{im}}delta _{{jell }}a_{j}b_{ell }c_{m}&=a_{j}b_{i}c_{j}-a_{j}b_{j}c_{i}end{aligned}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a402e5ff4d16ae175abb184095cc01b4576d5e79)
thusly:

Note this is antisymmetric in b a C, as expected from the left hand side. Similarly, via index notation or even just cyclically relabelling A, b, a C in the previous result and taking the negative:

and the difference in results show that the cross product is not associative. More complex identities, like quadruple products;

and so on, can be derived in a similar manner.
Transformations of Cartesian tensors (any number of dimensions)
Tensors are defined as quantities which transform in a certain way under linear transformations of coordinates.
Second order
Nechat A = AiEi a b = biEi be two vectors, so that they transform according to Aj = AiLij, bj = biLij.
Taking the tensor product gives:

then applying the transformation to the components

and to the bases

gives the transformation law of an order-2 tensor. The tensor A⊗b is invariant under this transformation:

More generally, for any order-2 tensor

the components transform according to;
 ,
,
and the basis transforms by:

Li R does not transform according to this rule - whatever quantity R may be - it is not an order 2 tensor.
Any order
More generally, for any order p tenzor

the components transform according to;

and the basis transforms by:

Pro pseudotensor S řádu p, the components transform according to;

Pseudovektory jako antisymetrické tenzory druhého řádu
Antisymetrickou povahu křížového produktu lze přepracovat do tenzorické formy následovně.[4] Nechat C být vektorem, A být pseudovektorem, b být dalším vektorem a T být tenzorem druhého řádu takovým, že:

Protože křížový produkt je lineární A a b, součásti T lze je najít kontrolou a jsou to:

takže pseudovektor A lze psát jako antisymetrický tenzor. To se transformuje jako tenzor, ne jako pseudotenzor. U výše uvedeného mechanického příkladu pro tangenciální rychlost tuhého tělesa, danou vztahem proti = ω × X, toto lze přepsat jako proti = Ω · X kde Ω je tenzor odpovídající pseudovektoru ω:

Například v elektromagnetismus, zatímco elektrické pole E je vektorové pole, magnetické pole B je pseudovektorové pole. Tato pole jsou definována z Lorentzova síla pro částice elektrický náboj q cestování rychlostí proti:

a vzhledem k druhému členu obsahujícímu křížový produkt pseudovektoru B a rychlostní vektor proti, lze jej napsat v maticové formě, s F, E, a proti jako vektory sloupců a B jako antisymetrická matice:

Pokud je pseudovektor výslovně dán křížovým produktem dvou vektorů (na rozdíl od vstupu do křížového produktu s jiným vektorem), lze takové pseudovektory také zapsat jako antisymetrické tenzory druhého řádu, přičemž každý vstup je složkou křížového produktu. Moment hybnosti klasické bodové částice obíhající kolem osy, definovaný J = X × p, je dalším příkladem pseudovektoru s odpovídajícím antisymetrickým tenzorem:

Ačkoli v teorii relativity se karteziánské tenzory nevyskytují; tenzorová forma orbitálního momentu hybnosti J vstupuje do vesmírné části relativistická moment hybnosti tenzor a výše uvedená tenzorová forma magnetického pole B vstupuje do vesmírné části elektromagnetický tenzor.
Vektorový a tenzorový počet
Následující vzorce jsou v kartézských souřadnicích jen tak jednoduché - obecně křivočaré souřadnice existují faktory metriky a její determinanty - viz tenzory v křivočarých souřadnicích pro obecnější analýzu.
Vektorový počet
Následují diferenciální operátoři vektorový počet. Po celou dobu vlevo Φ (r, t) být a skalární pole, a


být vektorová pole, ve kterém jsou všechna skalární a vektorová pole funkcí vektor polohy r a čas t.
The spád operátor v kartézských souřadnicích je dán vztahem:

a v indexové notaci se to obvykle zkracuje různými způsoby:

Tento operátor působí na skalární pole Φ, aby získal vektorové pole směrované v maximální rychlosti nárůstu Φ:

Zápis indexu pro tečkovaný a křížový produkt se přenáší na diferenciální operátory vektorového počtu.[5]
The směrový derivát skalárního pole Φ je rychlost změny Φ podél nějakého směrového vektoru A (ne nutně a jednotkový vektor ), vytvořený ze složek A a gradient:

The divergence vektorového pole A je:

Všimněte si, že výměna složek gradientu a vektorového pole poskytuje odlišný diferenciální operátor

které by mohly působit na skalární nebo vektorová pole. Ve skutečnosti, pokud A se nahrazuje rychlostní pole u(r, t) kapaliny, toto je termín v materiálový derivát (s mnoha jinými jmény) z mechanika kontinua, přičemž dalším termínem je derivace částečného času:

které obvykle působí na rychlostní pole vedoucí k nelinearitě v Navier-Stokesovy rovnice.
jako pro kučera vektorového pole A, toto lze definovat jako pole pseudovektoru pomocí ε symbol:

který je platný pouze ve třech rozměrech, nebo antisymetrické tenzorové pole druhého řádu prostřednictvím antisymetrizace indexů, indikovaných ohraničením antisymetrizovaných indexů hranatými závorkami (viz Ricciho počet ):
![left ( nabla times { mathbf {A}} right) _ {{ij}} = nabla _ {i} A_ {j} - nabla _ {j} A_ {i} = 2 nabla _ {{[i}} A _ {{j]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/486f801d7a7b979c2d973950cb58fa83e3ccae75)
který je platný v libovolném počtu rozměrů. V každém případě by se pořadí složek gradientu a vektorového pole nemělo zaměňovat, protože by to vedlo k jinému diferenciálnímu operátoru:

![A_ {i} nabla _ {j} -A_ {j} nabla _ {i} = 2A _ {{[i}} nabla _ {{j]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78166cd177c54365a6c04f460e9a4ff15072ac6f)
které by mohly působit na skalární nebo vektorová pole.
Nakonec Laplaciánský operátor je definována dvěma způsoby, divergencí gradientu skalárního pole Φ:

nebo čtverec operátoru přechodu, který působí na skalární pole Φ nebo na vektorové pole A:


Ve fyzice a inženýrství, gradient, divergence, zvlnění a laplaciánský operátor nevyhnutelně vznikají v mechanika tekutin, Newtonova gravitace, elektromagnetismus, vedení tepla, a dokonce kvantová mechanika.
Identity vektorového počtu lze odvodit podobným způsobem jako u vektorových teček a křížových produktů a kombinací. Například ve třech rozměrech je zvlnění křížového produktu dvou vektorových polí A a B:
![{ begin {aligned} left [ nabla times ({ mathbf {A}} times { mathbf {B}}) right] _ {i} & = varepsilon _ {{ijk}} nabla _ {j} ( varepsilon _ {{k ell m}} A _ { ell} B_ {m}) & = ( varepsilon _ {{ijk}} varepsilon _ {{ ell mk}}) nabla _ {j} (A _ { ell} B_ {m}) & = ( delta _ {{i ell}} delta _ {{jm}} - delta _ {{im}} delta _ {{j ell}}) (B_ {m} nabla _ {j} A _ { ell} + A _ { ell} nabla _ {j} B_ {m}) & = (B_ { j} nabla _ {j} A_ {i} + A_ {i} nabla _ {j} B_ {j}) - (B_ {i} nabla _ {j} A_ {j} + A_ {j} nabla _ {j} B_ {i}) & = (B_ {j} nabla _ {j}) A_ {i} + A_ {i} ( nabla _ {j} B_ {j}) - B_ { i} ( nabla _ {j} A_ {j}) - (A_ {j} nabla _ {j}) B_ {i} & = left [({ mathbf {B}} cdot nabla ) { mathbf {A}} + { mathbf {A}} ( nabla cdot { mathbf {B}}) - { mathbf {B}} ( nabla cdot { mathbf {A}}) - ({ mathbf {A}} cdot nabla) { mathbf {B}} vpravo] _ {i} konec {zarovnáno}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/924093866d35e5f1252bad687ca8a1b886043174)
Kde produktové pravidlo byl použit a v celém diferenciálním operátoru nebyl zaměněn s A nebo B. Tím pádem:

Tenzorový počet
Jeden může pokračovat v operacích na tenzorech vyššího řádu. Nechat T = T(r, t) označují tenzorové pole druhého řádu, opět závislé na vektoru polohy r a čas t.
Například gradient vektorového pole ve dvou ekvivalentních notacích („dyadický“ a „tenzor“) je:

což je tenzorové pole druhého řádu.
Divergence tenzoru je:

což je vektorové pole. To vyvstává v mechanice kontinua v Cauchyho zákony pohybu - divergence Cauchyho tenzoru napětí σ je vektorové pole související s tělesné síly působící na tekutinu.
Rozdíl od standardního tenzorového počtu
Kartézské tenzory jsou jako v tenzorová algebra, ale Euklidovská struktura a omezení základny přináší ve srovnání s obecnou teorií některá zjednodušení.
Obecná tenzorová algebra se skládá z obecné smíšené tenzory typu (p, q):

se základními prvky:

komponenty se transformují podle:

pokud jde o základy:

U kartézských tenzorů pouze objednávka p + q tenzorových záležitostí v euklidovském prostoru s ortonormálním základem a vše p + q indexy lze snížit. Kartézský základ neexistuje, pokud vektorový prostor nemá kladně definitivní metriku, a proto jej nelze použít v relativistické kontexty.
Dějiny
Dyadické tenzory byly historicky prvním přístupem k formulování tenzorů druhého řádu, podobně triadické tenzory pro tenzory třetího řádu atd. Kartézské tenzory používají notace tenzorového indexu, ve kterém rozptyl může být přehlíženo a je často ignorováno, protože komponenty zůstávají nezměněny pomocí zvyšování a snižování indexů.
Viz také
Reference
Poznámky
Další čtení a aplikace
externí odkazy