Systém Lorenz - Lorenz system

The Systém Lorenz je systém obyčejné diferenciální rovnice nejprve studoval Edward Lorenz a Ellen Fetter. Je pozoruhodné mít chaotický řešení pro určité hodnoty parametrů a počáteční podmínky. Zejména Lorenzův atraktor je soubor chaotických řešení Lorenzova systému. V populárních médiíchefekt motýlích křídel „pramení ze skutečných důsledků Lorenzova atraktoru, tj. z toho, že v jakémkoli fyzickém systému, při absenci dokonalé znalosti počátečních podmínek (dokonce i nepatrného narušení vzduchu v důsledku motýla mávajícího křídly), naše schopnost předpovídat jeho budoucí směr vždy selže. To podtrhuje, že fyzické systémy mohou být zcela deterministické a přesto mohou být ze své podstaty nepředvídatelné i při absenci kvantových efektů. Tvar samotného Lorenzova atraktoru, když je vykreslen graficky, může také vypadat, že připomíná motýla.
Přehled
V roce 1963 Edward Lorenz, s pomocí Ellen Fetter, vyvinul zjednodušený matematický model pro atmosférická konvekce.[1] Model je systém tří obyčejných diferenciálních rovnic, nyní známých jako Lorenzovy rovnice:
![{displaystyle {egin {aligned} {frac {mathrm {d} x} {mathrm {d} t}} & = sigma (yx), [6pt] {frac {mathrm {d} y} {mathrm {d} t }} & = x (ho -z) -y, [6pt] {frac {mathrm {d} z} {mathrm {d} t}} & = xy- eta z.end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7928004d58943529a7be774575a62ca436a82a7f)
Rovnice se týkají vlastností dvourozměrné fluidní vrstvy rovnoměrně ohřáté zespodu a ochlazené shora. Rovnice zejména popisují rychlost změny tří veličin s ohledem na čas: je úměrná rychlosti proudění, - vodorovnému kolísání teploty a - na vertikální teplotní výkyvy.[2] Konstanty , , a jsou parametry systému úměrné Prandtl číslo, Rayleighovo číslo a určité fyzické rozměry samotné vrstvy.[2]






Lorenzovy rovnice také vznikají ve zjednodušených modelech pro lasery,[3] dynama,[4] termosyfony,[5] bezkartáčový Stejnosměrné motory,[6] elektrické obvody,[7] chemické reakce[8] a dopředná osmóza.[9] Lorenzovy rovnice jsou také řídící rovnice ve Fourierově prostoru pro Malkus vodní kolo.[10][11] Vodní kolo Malkus vykazuje chaotický pohyb, kdy místo otáčení v jednom směru při konstantní rychlosti se jeho rotace zrychlí, zpomalí, zastaví, změní směr a bude nepředvídatelným způsobem oscilovat tam a zpět mezi kombinacemi takového chování.
Z technického hlediska je to systém Lorenz nelineární, neperiodické, trojrozměrné a deterministický. Lorenzovy rovnice byly předmětem stovek výzkumných článků a alespoň jedné knihy trvající studie.[2]
Analýza
Jeden normálně předpokládá, že parametry , , a jsou pozitivní. Lorenz použil hodnoty , a . Systém vykazuje chaotické chování pro tyto (a blízké) hodnoty.[12]



Li pak existuje pouze jeden rovnovážný bod, který je v počátku. Tento bod odpovídá žádné konvekci. Všechny dráhy se sbíhají k počátku, což je globální atraktor, když .[13]

A rozdvojení vidle dochází v , a pro dva další kritické body se objeví na: a To odpovídá stálé konvekci. Tato dvojice rovnovážných bodů je stabilní, pouze pokud





který může platit pouze pro pozitivní -li . Při kritické hodnotě ztratí oba rovnovážné body stabilitu subkritickým Hopf rozdvojení.[14]

Když , , a , Lorenzův systém má chaotická řešení (ale ne všechna řešení jsou chaotická). Téměř všechny počáteční body budou mít sklon k neměnné množině - Lorenzův atraktor - a podivný atraktor, a fraktální a samo-vzrušený atraktor s ohledem na všechny tři rovnováhy. Své Hausdorffova dimenze odhaduje seshora Lyapunovova dimenze (Kaplan-Yorkeova dimenze) jako 2,06 ± 0,01,[15] a korelační dimenze se odhaduje na 2,05 ± 0,01.[16]Přesný vzorec Lyapunovovy dimenze globálního atraktoru lze analyticky najít za klasických omezení parametrů:[17][15][18]

Lorenzův atraktor je obtížné analyzovat, ale působení diferenciální rovnice na atraktor je popsáno poměrně jednoduchým geometrickým modelem.[19] Čtrnáctý problém na seznamu prokazuje, že tomu tak skutečně je Smaleovy problémy. Tento problém byl vyřešen jako první Warwick Tucker v roce 2002.[20]
Pro ostatní hodnoty , systém zobrazuje vázané periodické dráhy. Například s stává se T(3,2) uzel torus.

| Příklad řešení systému Lorenz pro různé hodnoty ρ | |
|---|---|
 |  |
| ρ = 14, σ = 10, β = 8/3 (Zvětšit) | ρ = 13, σ = 10, β = 8/3 (Zvětšit) |
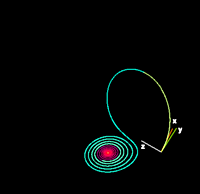 |  |
| ρ = 15, σ = 10, β = 8/3 (Zvětšit) | ρ = 28, σ = 10, β = 8/3 (Zvětšit) |
| Pro malé hodnoty ρ, systém je stabilní a vyvíjí se do jednoho ze dvou přitahovačů s pevným bodem. Když je ρ větší než 24,74, stanou se pevné body repulzory a trajektorie je odrazena velmi složitým způsobem. | |
| Citlivá závislost na počátečním stavu | ||
|---|---|---|
| Čas t = 1 (Zvětšit) | Čas t = 2 (Zvětšit) | Čas t = 3 (Zvětšit) |
 |  | 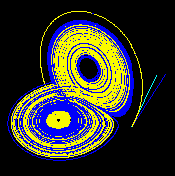 |
| Tyto údaje - vyrobené pomocí ρ = 28, σ = 10 a β = 8/3 - zobrazit tři časové úseky 3-D vývoje dvou trajektorií (jedna v modré, druhá ve žluté) v Lorenzově atraktoru začínající ve dvou počátečních bodech, které se liší pouze o 10−5 v X-koordinovat. Zpočátku se obě trajektorie zdají shodné (je vidět pouze žlutá, protože je nakreslena přes modrou), ale po nějaké době je divergence zřejmá. | ||
Simulace
Simulace MATLABu
% Řešení v časovém intervalu [0,100] s počátečními podmínkami [1,1,1]% '' f '' je sada diferenciálních rovnic% '' a '' je pole obsahující proměnné x, yaz% '' t '' je časová proměnnásigma = 10;beta = 8/3;rho = 28;F = @(t,A) [-sigma*A(1) + sigma*A(2); rho*A(1) - A(2) - A(1)*A(3); -beta*A(3) + A(1)*A(2)];[t,A] = ode45(F,[0 100],[1 1 1]); % Runge-Kutta řešitel ODE 4. / 5. řáduplot3(A(:,1),A(:,2),A(:,3))Simulace Mathematica
Standardní způsob:
tendence=50;ekv={X'[t]==σ(y[t]-X[t]),y'[t]==X[t](ρ-z[t])-y[t],z'[t]==X[t]y[t]-βz[t]};inic={X[0]==10,y[0]==10,z[0]==10};pars={σ->10,ρ->28,β->8/3};{xs,ys,zs}=NDSolveValue[{ekv/.pars,inic},{X,y,z},{t,0,tendence}];ParametricPlot3D[{xs[t],ys[t],zs[t]},{t,0,tendence}]Méně podrobné:
Lorenz=NonlinearStateSpaceModel[{{σ(y-X),X(ρ-z)-y,Xy-βz},{}},{X,y,z},{σ,ρ,β}];soln[t_]=StateResponse[{Lorenz,{10,10,10}},{10,28,8/3},{t,0,50}];ParametricPlot3D[soln[t],{t,0,50}]Dynamicky interaktivní řešení:
ekv={X'[t]==σ(y[t]-X[t]),y'[t]==X[t](ρ-z[t])-y[t],z'[t]==X[t]y[t]-βz[t],X[0]==10,y[0]==10,z[0]==10};tmax=50;sol=ParametricNDSolveValue[ekv,Funkce[t,{X[t],y[t],z[t]}],{t,0,tmax},{σ,ρ,β}];Manipulovat[zábava=sol[σ,ρ,β];spiknutí=ParametricPlot3D[zábava[t],{t,0,tmax},PlotRange->Všechno,PerformanceGoal->"Kvalitní"];Animovat[Ukázat[spiknutí,Graphics3D[{PointSize[0.05],Červené,Směřovat[zábava[t]]}]],{t,0,tmax},Animace Běh->Skutečný,AnimationRate->1],{{σ,10},0,100},{{ρ,28},0,100},{{β,8/3},0,100},Pásové symboly:>{σ,ρ,β}]Simulace Pythonu
import numpy tak jako npimport matplotlib.pyplot tak jako pltz scipy.integrovat import odeintz mpl_toolkits.mplot3d import Sekery3Drho = 28.0sigma = 10.0beta = 8.0 / 3.0def F(Stát, t): X, y, z = Stát # Rozbalte stavový vektor vrátit se sigma * (y - X), X * (rho - z) - y, X * y - beta * z # Derivátystav0 = [1.0, 1.0, 1.0]t = np.divný(0.0, 40.0, 0.01)státy = odeint(F, stav0, t)obr = plt.postava()sekera = obr.gca(projekce="3d")sekera.spiknutí(státy[:, 0], státy[:, 1], státy[:, 2])plt.kreslit()plt.ukázat()Simulace Modelica
Modelka LorenzSystem parametr Nemovitý sigma = 10; parametr Nemovitý rho = 28; parametr Nemovitý beta = 8/3; parametr Nemovitý x_start = 1 "Počáteční souřadnice x"; parametr Nemovitý y_start = 1 "Počáteční souřadnice y"; parametr Nemovitý z_start = 1 "Počáteční souřadnice Z"; Nemovitý X "souřadnice x"; Nemovitý y "souřadnice y"; Nemovitý z "souřadnice z";počáteční rovnice X = x_start; y = y_start; z = z_start;rovnice der(X) = sigma*(y-X); der(y) = rho*X - y - X*z; der(z) = X*y - beta*z;konec LorenzSystem;Simulace Julie
použitím Diferenciální rovnice, Parametrizované funkce, PozemkyLorenz = @de_def začít # definujte systém dx = σ * (y - X) dy = X * (ρ - z) - y dz = X * y - β*zkonec σ ρ βu0 = [1.0,0.0,0.0] # počáteční podmínkytspan = (0.0,100.0) # časové rozpětíp = [10.0,28.0,8/3] # parametrůprob = ODEProblém(Lorenz, u0, tspan, p) # definujte problémsol = řešit(prob) # vyřešitspiknutí(sol, vars = (1, 2, 3)) # řešení plotru ve fázovém prostoru - proměnné seřazené s 1 založenou indexacíSimulace maxima
zatížení(dynamika)$zatížení(kreslit)$/ * Parametry systému * /A: 10; b: 8/3; r: 28;lorenzSystem: [A*(y-X), -X*z+r*X-y, X*y-b*z];závislé proměnné: [X, y, z]$initialValues: [1, 1, 1]$časový rozsah: [t, 0, 50, 0.01]$/ * řešení metodou Runge-Kutta 4. řádu * /systemSolution: rk(lorenzSystem, závislé proměnné, initialValues, časový rozsah)$solutionPoints: mapa(lambda([X], odpočinek(X)), systemSolution)$draw3d(point_type=žádný, points_joined=skutečný, barva=modrý, xlabel=„x (t)“, ylabel=„y (t)“, zlabel=„z (t)“, bodů(solutionPoints));Odvození Lorenzových rovnic jako modelu atmosférické konvekce
Lorenzovy rovnice jsou odvozeny z Oberbeck – Boussinesqova aproximace k rovnicím popisujícím cirkulaci tekutiny v mělké vrstvě tekutiny, rovnoměrně zahřívané zespodu a rovnoměrně chlazené shora.[1] Tato cirkulace tekutin je známá jako Rayleigh – Bénardova konvekce. Předpokládá se, že tekutina cirkuluje ve dvou rozměrech (vertikální a horizontální) s periodickými obdélníkovými okrajovými podmínkami.
Parciální diferenciální rovnice modelování systému funkce streamu a teplota jsou vystaveny spektrálnímu Galerkinova aproximace: hydrodynamická pole se rozšiřují ve Fourierových řadách, které se pak silně zkracují na jeden člen pro funkci proudu a dva členy pro teplotu. To redukuje modelové rovnice na sadu tří spojených nelineárních obyčejných diferenciálních rovnic. Podrobnou derivaci lze nalézt například v textech nelineární dynamiky.[21] Systém Lorenz je zmenšená verze většího systému, který dříve studoval Barry Saltzman.[22]
Řešení 14. problému Smale
Smaleův 14. problém říká: „Vykazují vlastnosti Lorenzova atraktoru vlastnosti zvláštního atraktoru?“, Odpověděla kladně Warwick Tucker v roce 2002.[20] K prokázání tohoto výsledku použil Tucker přísné numerické metody jako aritmetika intervalu a normální formy. Nejprve Tucker definoval průřez který je příčně řezán trajektoriemi toku. Z toho lze definovat mapu prvního návratu , který každému přiřadí bod kde trajektorie první protíná .





Poté je důkaz rozdělen do tří hlavních bodů, které jsou prokázány a naznačují existenci podivného atraktoru.[23] Tři body jsou:
- Existuje region invariant pod mapou prvního návratu, což znamená
- Zpětná mapa připouští vpřed invariantní kuželové pole
- Vektory uvnitř tohoto invariantního kuželového pole jsou derivací rovnoměrně rozšířeny zpáteční mapy.



Abychom dokázali první bod, všimli jsme si, že průřez je řez o dva oblouky tvořené (vidět [23]). Tucker pokrývá umístění těchto dvou oblouků malými obdélníky , spojení těchto obdélníků dává . Nyní je cílem dokázat, že pro všechny body v , tok přinese zpět body dovnitř , v . Abychom to mohli udělat, vezmeme plán níže na dálku malé, pak tím, že centrum z a pomocí Eulerovy integrační metody lze odhadnout, kam tok přinese v což nám dává nový bod . Potom lze odhadnout, kde jsou body bude mapováno v pomocí Taylorovy expanze nám to dá nový obdélník soustředěný na . Víme tedy, že všechny body v bude mapováno v . Cílem je provést tuto metodu rekurzivně, dokud se tok nevrátí a získáme obdélník v tak, že to víme . Problém je v tom, že náš odhad může být po několika iteracích nepřesný, takže Tucker dělá rozdělení do menších obdélníků a poté aplikujte postup rekurzivně. Dalším problémem je, že při aplikaci tohoto algoritmu se tok stává více „horizontálním“ (viz [23]), což vedlo k dramatickému nárůstu nepřesností. Aby se tomu zabránilo, algoritmus změní orientaci průřezů na vodorovnou nebo svislou.











Příspěvky
Lorenz bere na vědomí příspěvky od Ellen Fetter ve svém příspěvku, který je zodpovědný za numerické simulace a čísla.[1] Taky, Margaret Hamilton pomohl při počátečních numerických výpočtech, které vedly k nálezům Lorenzova modelu.[24]
Galerie

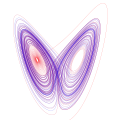
Řešení v Lorenzově atraktoru vynesené ve vysokém rozlišení do roviny x-z.
Řešení v Lorenzově atraktoru vykreslené jako SVG.
Animace ukazující trajektorie více řešení v systému Lorenz.

Řešení v Lorenzově atraktoru vykreslené jako kovový drát, který ukazuje směr a 3D struktura.
Animace ukazující divergenci blízkých řešení systému Lorenz.

Vizualizace Lorenzova atraktoru v blízkosti přerušovaného cyklu.

Dvě proudnice v systému Lorenz, od rho = 0 do rho = 28 (sigma = 10, beta = 8/3)







Viz také
- Edenova domněnka na Lyapunovu dimenzi
- Model Lorenz 96
- Seznam chaotických map
- Věta o převzetí
Poznámky
- ^ A b C Lorenz (1963)
- ^ A b C Sparrow (1982)
- ^ Haken (1975)
- ^ Knobloch (1981)
- ^ Gorman, Widmann a Robbins (1986)
- ^ Hemati (1994)
- ^ Cuomo & Oppenheim (1993)
- ^ Polsko (1993)
- ^ Tzenov (2014)[Citace je zapotřebí ]
- ^ Kolář & Gumbs (1992)
- ^ Mishra & Sanghi (2006)
- ^ Hirsch, Smale & Devaney (2003), str. 303–305
- ^ Hirsch, Smale & Devaney (2003), str. 306 + 307
- ^ Hirsch, Smale & Devaney (2003), str. 307 + 308
- ^ A b Kuznetsov, N.V .; Mokaev, T.N .; Kuzněcovová, O.A .; Kudryashova, E.V. (2020). „Lorenzův systém: skrytá hranice praktické stability a Lyapunovova dimenze“. Nelineární dynamika. doi:10.1007 / s11071-020-05856-4.
- ^ Grassberger a Procaccia (1983)
- ^ Leonov a kol. (2016)
- ^ Kuzněcov, Nikolay; Reitmann, Volker (2020). Odhady dimenze atraktoru pro dynamické systémy: teorie a výpočet. Cham: Springer.
- ^ Guckenheimer, John; Williams, R. F. (01.12.1979). „Strukturální stabilita Lorenzových atraktorů“. Publikace Mathématiques de l'Institut des Hautes Études Scientifiques. 50 (1): 59–72. doi:10.1007 / BF02684769. ISSN 0073-8301.
- ^ A b Tucker (2002)
- ^ Hilborn (2000), Dodatek C; Bergé, Pomeau a Vidal (1984), Příloha D
- ^ Saltzman (1962)
- ^ A b C Viana (2000)
- ^ Lorenz (1960)
Reference
- Bergé, Pierre; Pomeau, Yves; Vidal, Christian (1984). Řád v chaosu: Směrem k deterministickému přístupu k turbulencím. New York: John Wiley & Sons. ISBN 978-0-471-84967-4.
- Cuomo, Kevin M .; Oppenheim, Alan V. (1993). "Okruhová implementace synchronizovaného chaosu s aplikacemi na komunikaci". Dopisy o fyzické kontrole. 71 (1): 65–68. Bibcode:1993PhRvL..71 ... 65C. doi:10.1103 / PhysRevLett.71.65. ISSN 0031-9007. PMID 10054374.
- Gorman, M .; Widmann, P.J .; Robbins, K.A. (1986). „Nelineární dynamika konvekční smyčky: Kvantitativní srovnání experimentu s teorií“. Physica D. 19 (2): 255–267. Bibcode:1986PhyD ... 19..255G. doi:10.1016/0167-2789(86)90022-9.
- Grassberger, P .; Procaccia, I. (1983). "Měření podivnosti podivných atraktorů". Physica D. 9 (1–2): 189–208. Bibcode:1983PhyD .... 9..189G. doi:10.1016/0167-2789(83)90298-1.
- Haken, H. (1975). "Analogie mezi vyššími nestabilitami tekutin a laserů". Fyzikální písmena A. 53 (1): 77–78. Bibcode:1975PhLA ... 53 ... 77H. doi:10.1016/0375-9601(75)90353-9.
- Hemati, N. (1994). "Zvláštní atraktory v střídavých stejnosměrných motorech". Transakce IEEE na obvodech a systémech I: Základní teorie a aplikace. 41 (1): 40–45. doi:10.1109/81.260218. ISSN 1057-7122.
- Hilborn, Robert C. (2000). Chaos a nelineární dynamika: Úvod pro vědce a inženýry (druhé vydání). Oxford University Press. ISBN 978-0-19-850723-9.
- Hirsch, Morris W.; Smale, Stephen; Devaney, Robert (2003). Diferenciální rovnice, dynamické systémy a úvod do chaosu (Druhé vydání.). Boston, MA: Akademický tisk. ISBN 978-0-12-349703-1.
- Knobloch, Edgar (1981). "Chaos v segmentovaném kotoučovém dynamu". Fyzikální písmena A. 82 (9): 439–440. Bibcode:1981PhLA ... 82..439K. doi:10.1016/0375-9601(81)90274-7.
- Kolář, Miroslav; Gumbs, Godfrey (1992). "Teorie experimentálního pozorování chaosu na rotujícím vodním kole". Fyzický přehled A. 45 (2): 626–637. doi:10.1103 / PhysRevA.45.626. PMID 9907027.
- Leonov, GA; Kuznetsov, N.V .; Korzhemanova, N.A .; Kusakin, D.V. (2016). "Lyapunovův dimenzní vzorec pro globální přitažlivost systému Lorenz". Komunikace v nelineární vědě a numerická simulace. 41: 84–103. arXiv:1508.07498. Bibcode:2016CNSNS..41 ... 84L. doi:10.1016 / j.cnsns.2016.04.032.
- Lorenz, Edward Norton (1963). „Deterministický neperiodický tok“. Journal of the Atmospheric Sciences. 20 (2): 130–141. Bibcode:1963JAtS ... 20..130L. doi:10.1175 / 1520-0469 (1963) 020 <0130: DNF> 2,0.CO; 2.
- Mishra, Aashwin; Sanghi, Sanjeev (2006). „Studie asymetrického vodního kola Malkus: zkreslené Lorenzovy rovnice“. Chaos: Interdisciplinární žurnál nelineárních věd. 16 (1): 013114. Bibcode:2006Chaos..16a3114M. doi:10.1063/1.2154792. PMID 16599745.
- Pchelintsev, A.N. (2014). "Numerické a fyzikální modelování dynamiky Lorenzova systému". Numerická analýza a aplikace. 7 (2): 159–167. doi:10.1134 / S1995423914020098.
- Polsko, Douglas (1993). „Kooperativní katalýza a chemický chaos: chemický model pro Lorenzovy rovnice“. Physica D. 65 (1): 86–99. Bibcode:1993PhyD ... 65 ... 86P. doi:10.1016 / 0167-2789 (93) 90006-M.
- Saltzman, Barry (1962). „Konvekce bez konvekce bez amplitudy jako problém počáteční hodnoty - já“. Journal of the Atmospheric Sciences. 19 (4): 329–341. Bibcode:1962JAtS ... 19..329S. doi:10.1175 / 1520-0469 (1962) 019 <0329: FAFCAA> 2.0.CO; 2.
- Sparrow, Colin (1982). Lorenzovy rovnice: bifurkace, chaos a podivné atraktory. Springer.
- Tucker, Warwick (2002). „Rigorózní řešení ODE a 14. problém Smallova“ (PDF). Základy výpočetní matematiky. 2 (1): 53–117. CiteSeerX 10.1.1.545.3996. doi:10,1007 / s002080010018.
- Tzenov, Stephan (2014). "Zvláštní atraktory charakterizující osmotickou nestabilitu". arXiv:1406.0979v1 [fyzika. flu-dyn ].
- Viana, Marcelo (2000). „Co je nového na podivných atraktorech Lorenza?“. Matematický zpravodaj. 22 (3): 6–19. doi:10.1007 / BF03025276.
- Lorenz, Edward N. (1960). "Statistická predikce řešení dynamických rovnic" (PDF). Sympozium o numerické předpovědi počasí v Tokiu.
Další čtení
- G.A. Leonov & N.V. Kuznetsov (2015). „O rozdílech a podobnostech v analýze systémů Lorenz, Chen a Lu“ (PDF). Aplikovaná matematika a výpočet. 256: 334–343. doi:10.1016 / j.amc.2014.12.132.
externí odkazy
- „Lorenzův atraktor“, Encyclopedia of Mathematics, Stiskněte EMS, 2001 [1994]
- Weisstein, Eric W. „Lorenzův atraktor“. MathWorld.
- Lorenzův atraktor Rob Morris, Demonstrační projekt Wolfram.
- Lorenzova rovnice na planetmath.org
- Synchronizovaný chaos a soukromá komunikace s Kevinem Cuomo. Implementace Lorenzova atraktoru v elektronickém obvodu.
- Interaktivní animace Lorenzova atraktora (potřebujete plugin Adobe Shockwave)
- 3D Attractors: Program Mac pro vizualizaci a prozkoumání Lorenzova atraktoru ve 3 dimenzích
- Lorenz Attractor implementován v analogové elektronické podobě
- Interaktivní animace Lorenz Attractor (implementováno v Adě s GTK +. Zdroje a spustitelné soubory)
- Webový Lorenz Attractor (implementováno v JavaScriptu / HTML / CSS)
- Interaktivní webový Lorenz Attractor vyrobeno s Jodidem


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}