Lambertova azimutální projekce na stejnou plochu - Lambert azimuthal equal-area projection - Wikipedia

The Lambertova azimutální projekce na stejnou plochu je konkrétní mapování z koule do a disk. Přesně to představuje plocha ve všech oblastech sféry, ale nepředstavuje to přesně úhly. Je pojmenován pro švýcarský matematik Johann Heinrich Lambert, který to oznámil v roce 1772.[1] "Zenithal" je synonymem pro "azimuthal" a projekce je také známá jako Lambert zenitální projekce na stejnou plochu.[2]
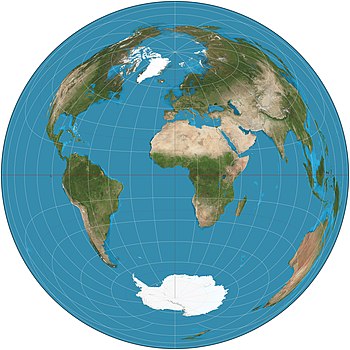
Lambertova azimutální projekce se používá jako a mapová projekce v kartografie. Například Národní atlas USA používá Lambertovu azimutální projekci stejné oblasti k zobrazení informací v online aplikaci Map Maker,[3] a Evropská agentura pro životní prostředí doporučuje jeho použití pro evropské mapování pro statistickou analýzu a zobrazování.[4] Používá se také ve vědeckých oborech, jako je geologie pro zakreslení orientací čar v trojrozměrném prostoru. Tomuto vykreslování napomáhá speciální druh milimetrový papír volal a Schmidtova síť.[5]
Definice

Chcete-li definovat Lambertovu azimutální projekci, představte si rovinu nastavenou tečně ke kouli v určitém bodě S na kouli. Nechat P být jakýkoli jiný bod na kouli než antipod z S. Nechat d být vzdálenost mezi S a P v trojrozměrném prostoru (ne vzdálenost podél povrchu koule). Pak se projekce odešle P do bodu P ′ v rovině, která je vzdáleností d z S.
Abychom to zpřesnili, existuje jedinečný kruh se středem na S, procházející Pa kolmo k rovině. Protíná rovinu ve dvou bodech; nechat P′ Být tím, komu je bližší P. Toto je promítaný bod. Viz obrázek. Antipod z S je vyloučen z projekce, protože požadovaný kruh není jedinečný. Případ S je zdegenerovaný; S se promítá na sebe v kruhu o poloměru 0.[6]
Pro provedení projekce na a. Jsou nutné explicitní vzorce počítač. Zvažte projekci se středem na S = (0, 0, −1) na jednotková koule, což je množina bodů (X, y, z) v trojrozměrném prostoru R3 takhle X2 + y2 + z2 = 1. v Kartézské souřadnice (X, y, z) na kouli a (X, Y) v rovině pak projekce a její inverze jsou popsány pomocí

v sférické souřadnice (φ, θ) na kouli (s φ the zenit a θ the azimut ) a polární souřadnice (R, Θ) na disku je mapa a její inverzní funkce dána vztahem [6]

v válcové souřadnice (r, θ, z) na kouli a polárních souřadnicích (R, Θ) v letadle je mapa a její inverzní funkce dána vztahem

Projekce může být vycentrována v jiných bodech a definována na sférách o poloměru jiném než 1 pomocí podobných vzorců.[7]
Vlastnosti
Jak je definováno v předchozí části, Lambertova azimutální projekce sféry jednotek není definována na (0, 0, 1). Posílá zbytek koule na otevřený disk o poloměru 2 se středem v počátku (0, 0) v rovině. Posílá bod (0, 0, −1) na (0, 0), rovník z = 0 do kruhu poloměru √2 se středem na (0, 0) a dolní polokouli z <0 na otevřený disk obsažený v tomto kruhu.
Projekce je a difeomorfismus (A bijekce to je nekonečně diferencovatelné v obou směrech) mezi koulí (minus (0, 0, 1)) a otevřeným diskem o poloměru 2. Jedná se o mapu zachovávající plochu (stejnou plochu), kterou lze vidět výpočtem plošný prvek koule, když je parametrizována inverzí projekce. V kartézských souřadnicích to je

To znamená, že měření oblasti oblasti na kouli se rovná měření oblasti odpovídající oblasti na disku.
Na druhé straně projekce nezachovává úhlové vztahy mezi křivkami na kouli. Žádné mapování mezi částí koule a rovinou nemůže zachovat úhly i oblasti. (Pokud ano, pak by to byl místní izometrie a uchoval by Gaussovo zakřivení; ale koule a disk mají různé zakřivení, takže to je nemožné.) Tato skutečnost, že ploché obrázky nemohou dokonale představovat oblasti koulí, je základním problémem kartografie.
V důsledku toho mohou být oblasti na kouli promítány do roviny se značně zkreslenými tvary. Toto zkreslení je obzvláště dramatické daleko od středu projekce (0, 0, -1). V praxi je projekce často omezena na polokouli soustředěnou v tomto bodě; druhou polokouli lze mapovat samostatně pomocí druhé projekce vycentrované na antipod.
Aplikace
Lambertova azimutální projekce byla původně koncipována jako mapová projekce stejné oblasti. Nyní se používá také v oborech, jako je geologie vykreslit směrová data následujícím způsobem.
Směr v trojrozměrném prostoru odpovídá přímce procházející počátkem. Sada všech těchto řádků je sama o sobě prostorem, který se nazývá skutečná projektivní rovina v matematika. Každá čára procházející počátkem protíná jednotkovou kouli přesně ve dvou bodech, z nichž jeden je na spodní polokouli z ≤ 0. (Vodorovné čáry protínají rovník z = 0 ve dvou antipodálních bodech. Rozumí se, že antipodální body na rovníku představují jednu linii. Vidět kvocient topologie.) Proto směry v trojrozměrném prostoru odpovídají (téměř dokonale) bodům na spodní polokouli. Polokouli lze poté vykreslit jako disk o poloměru √2 pomocí Lambertovy azimutální projekce.
Lambertova azimutální projekce nám tedy umožňuje vykreslit směry jako body na disku. Kvůli vlastnosti stejné plochy projekce je možné integrovat přes oblasti skutečné projektivní roviny (prostor směrů) integrací přes odpovídající oblasti na disku. To je užitečné pro statistickou analýzu směrových dat,[6] včetně náhodných rigidních otáčení.[8]
Lambertovou azimutální projekcí lze vykreslit nejen čáry, ale také roviny procházející počátkem. Letadlo protíná polokouli kruhovým obloukem, který se nazývá stopa roviny, která na disku vyčnívá dolů ke křivce (obvykle nekruhové). Tuto křivku lze vykreslit nebo lze rovinu nahradit rovinou kolmou na ni, která se nazývá póla místo toho nakreslete tento řádek. Když je vyneseno mnoho rovin společně, vykreslení pólů místo stop vytvoří méně přeplněný graf.
Výzkumní pracovníci v strukturní geologie k vykreslení použijte Lambertovu azimutální projekci krystalografické sekery a tváře, linkování a foliace ve skalách, slickensides v poruchy a další lineární a rovinné prvky. V této souvislosti se projekce nazývá rovnoměrná hemisférická projekce. K dispozici je také polokulová projekce se stejným úhlem definovaná stereografická projekce.[6]
Diskuse zde zdůraznila dolní polokouli z ≤ 0, ale některé disciplíny upřednostňují horní polokouli z ≥ 0.[6] Ve skutečnosti lze k záznamu linií počátkem v trojrozměrném prostoru použít jakoukoli hemisféru.

Animovaná Lambertova projekce



Nechat být dva parametry, pro které a . Nechat být parametrem „time“ (rovná se výšce nebo svislé tloušťce skořápky v animaci). Pokud je nakreslena jednotná přímočará mřížka prostor, pak se jakýkoli bod v této mřížce přemění na bod na sférické skořápce výšky podle mapování








kde . Každý snímek v animaci odpovídá parametrickému grafu deformované mřížky při pevné hodnotě výšky skořápky (v rozmezí od 0 do 2). Fyzicky, je úsek (deformovaná délka dělená počáteční délkou) nekonečně malé čáry úsečky. Toto mapování lze převést na takové, které udržuje jižní pól pevně pomocí pomocí
![{ displaystyle lambda (u, H) = { frac {1} {2}} { sqrt {(1-u) left [8-H ^ {2} (1-u) right]}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/4cf3eaae0a7651d0fcc7f6b38101f8c6848b7ad8)



Bez ohledu na hodnoty , Jacobian tohoto mapování je všude roven 1, což ukazuje, že se skutečně jedná o mapování stejné oblasti v celé animaci. Toto zobecněné mapování zahrnuje Lambertovu projekci jako speciální případ, když .


{kind=link}
Aplikace: toto mapování může pomoci vysvětlit význam Lambertovy projekce tím, že ukáže, že „odloupne“ kouli u pólu a promění ji na disk beze změny oblasti uzavřené buňkami mřížky.
Viz také
Reference
- ^ Mulcahy, Karen. „Lambert Azimuthal Equal Area“. City University of New York. Citováno 2007-03-30.
- ^ The Times Atlas of the World (1967), Boston: Houghton Mifflin, Plate 3, et passim.
- ^ „Mapové projekce: Od sférické Země k ploché mapě“. Ministerstvo vnitra Spojených států. 2008-04-29. Archivovány od originál dne 2009-05-07. Citováno 2009-04-08.
- ^ „Krátký sborník z 1. evropského semináře o referenčních sítích, Ispra, 27. – 29. Října 2003“ (PDF). Evropská agentura pro životní prostředí. 14.06.2004. p. 6. Citováno 2009-08-27.
- ^ Ramsay (1967)
- ^ A b C d E Borradaile (2003).
- ^ „Geomatics Guidance Note 7, part 2: Coordinate Converts & Transformations including Formulas“ (PDF). Mezinárodní asociace producentů ropy a zemního plynu. Září 2016. Citováno 2017-12-17.
- ^ Brannon, R.M., „Rotace, odraz a změna rámu“, 2018
Zdroje
- Borradaile, Graham J. (2003). Statistika údajů o Zemi. Berlín: Springer-Verlag. ISBN 3-540-43603-0.
- Do Carmo; Manfredo P. (1976). Diferenciální geometrie křivek a ploch. Englewood Cliffs, New Jersey: Prentice Hall. ISBN 0-13-212589-7.
- Hobbs, Bruce E., Means, Winthrop D. a Williams, Paul F. (1976). Nástin strukturní geologie. New York: John Wiley & Sons, Inc. ISBN 0-471-40156-0.CS1 maint: více jmen: seznam autorů (odkaz)
- Ramsay, John G. (1967). Skládání a lom hornin. New York: McGraw-Hill.
- Spivak, Michael (1999). Komplexní úvod do diferenciální geometrie. Houston, Texas: Publikovat nebo zahynout. ISBN 0-914098-70-5.
externí odkazy
- Vysvětlení souřadnicových převodů pomocí diagramů
 Média související s Lambertova azimutální projekce na stejnou plochu na Wikimedia Commons
Média související s Lambertova azimutální projekce na stejnou plochu na Wikimedia Commons