Polární souřadnicový systém - Polar coordinate system

v matematika, polární souřadnicový systém je dvourozměrný souřadnicový systém ve kterém každý směřovat na letadlo je určeno a vzdálenost z referenčního bodu a úhel z referenčního směru. Referenční bod (analogický k původu a Kartézský souřadnicový systém ) se nazývá póla paprsek od pólu v referenčním směru je polární osa. Vzdálenost od pólu se nazývá radiální souřadnice, radiální vzdálenost nebo jednoduše poloměra úhel se nazývá úhlová souřadnice, polární úhelnebo azimut.[1] Radiální souřadnice je často označována r nebo ρ a úhlová souřadnice pomocí φ, θ nebo t. Úhly v polárním zápisu jsou obecně vyjádřeny v obou stupňů nebo radiány (2π rad se rovná 360 °).
Grégoire de Saint-Vincent a Bonaventura Cavalieri samostatně představil pojmy v polovině 17. století, i když se jedná o skutečný termín polární souřadnice bylo připsáno Gregorio Fontana v 18. století. Počáteční motivací pro zavedení polárního systému bylo studium oběžník a orbitální pohyb.
Polární souřadnice jsou nejvhodnější v jakémkoli kontextu, kde uvažovaný jev je neodmyslitelně spojen se směrem a délkou od středového bodu v rovině, jako například spirály. Rovinné fyzické systémy s těly pohybujícími se kolem centrálního bodu nebo jevy pocházející z centrálního bodu jsou často jednodušší a intuitivnější pro modelování pomocí polárních souřadnic.
Polární souřadnicový systém je rozšířen do tří dimenzí dvěma způsoby: válcovitý a sférický souřadnicové systémy.
Dějiny

Pojmy úhel a poloměr již používaly starověké národy prvního tisíciletí před naším letopočtem. The Řecký astronom a astrolog Hipparchus (190–120 př. N. L.) Vytvořil tabulku akord funkce udávající délku akordu pro každý úhel a existují odkazy na jeho použití polárních souřadnic při vytváření hvězdných pozic.[2] v Na spirálách, Archimedes popisuje Archimédova spirála, funkce, jejíž poloměr závisí na úhlu. Řecká práce se však nevztahovala na úplný souřadnicový systém.
Od 8. století našeho letopočtu astronomové vyvinuli metody pro aproximaci a výpočet směru k Mekka (qibla ) —A jeho vzdálenost - od jakéhokoli místa na Zemi.[3] Od 9. století dále používali sférická trigonometrie a mapová projekce metody pro přesné stanovení těchto veličin. Výpočet je v podstatě převodem rovníkové polární souřadnice Mekky (tj. její zeměpisná délka a zeměpisná šířka ) k jeho polárním souřadnicím (tj. kibla a vzdálenost) vzhledem k systému, jehož referenčním poledníkem je velký kruh skrz dané místo a póly Země a jehož polární osou je čára procházející tímto místem a jeho antipodální bod.[4]
Existují různé zprávy o zavedení polárních souřadnic jako součást formálního souřadnicového systému. Celá historie předmětu je popsána v Harvard profesor Julian Lowell Coolidge je Počátek polárních souřadnic.[5] Grégoire de Saint-Vincent a Bonaventura Cavalieri nezávisle představil pojmy v polovině sedmnáctého století. Saint-Vincent o nich psal soukromě v roce 1625 a svou práci publikoval v roce 1647, zatímco Cavalieri publikoval v roce 1635 s opravenou verzí, která se objevila v roce 1653. Cavalieri nejprve použil polární souřadnice k vyřešení problému týkajícího se oblasti uvnitř Archimédova spirála. Blaise Pascal následně použity polární souřadnice k výpočtu délky parabolické oblouky.
v Metoda fluxií (psáno 1671, publikováno 1736), pane Isaac Newton zkoumal transformace mezi polárními souřadnicemi, které nazýval „Sedmý způsob; pro spirály“, a devíti dalšími souřadnicovými systémy.[6] V deníku Acta Eruditorum (1691), Jacob Bernoulli použil systém s bodem na přímce zvaný pól a polární osa resp. Souřadnice byly určeny vzdáleností od pólu a úhlem od polární osa. Bernoulliho práce se rozšířila na hledání poloměr zakřivení křivek vyjádřených v těchto souřadnicích.
Skutečný termín polární souřadnice bylo připsáno Gregorio Fontana a používali jej italští spisovatelé z 18. století. Termín se objevil v Angličtina v George Peacock překlad z roku 1816 Lacroix je Diferenciální a integrální počet.[7][8] Alexis Clairaut byl první, kdo vymyslel polární souřadnice ve třech rozměrech, a Leonhard Euler byl první, kdo je skutečně vyvinul.[5]
Konvence

Radiální souřadnice je často označována r nebo ρ a úhlová souřadnice pomocí φ, θ nebo t. Úhlová souřadnice je zadána jako φ podle ISO Standard 31-11. V matematické literatuře je však úhel často označován θ místo φ.
Úhly v polárním zápisu jsou obecně vyjádřeny v obou stupňů nebo radiány (2π rad se rovná 360 °). Stupně se tradičně používají v navigace, geodetické a mnoho aplikovaných oborů, zatímco radiány jsou běžnější v matematice a matematice fyzika.[9]
Úhel φ je definován tak, že začíná při 0 ° od a referenční směr, a zvýšit pro rotaci v obou proti směru hodinových ručiček (cw) nebo ve směru hodinových ručiček (cw) orientace. Například v matematice je referenční směr obvykle nakreslen jako paprsek od pólu vodorovně doprava a polární úhel se zvyšuje na kladné úhly pro rotace ccw, zatímco v navigaci (ložisko, nadpis ) hlavička 0 ° je nakreslena svisle nahoru a úhel se zvětšuje pro rotace vpravo. Polární úhly se zmenšují směrem k záporným hodnotám pro rotace v opačně orientovaných orientacích.
Jedinečnost polárních souřadnic
Přidání libovolného počtu plných zatáčky (360 °) k úhlové souřadnici nemění odpovídající směr. Podobně je jakákoli polární souřadnice stejná jako souřadnice se zápornou radiální složkou a opačným směrem (přidání 180 ° k polárnímu úhlu). Stejný bod (r, φ) lze vyjádřit nekonečným počtem různých polárních souřadnic (r, φ + n × 360°) a (−r, φ + 180° + n × 360°) = (−r, φ + (2n + 1) × 180°), kde n je libovolný celé číslo.[10] Samotný pól lze navíc vyjádřit jako (0,φ) pro jakýkoli úhel φ.[11]
Pokud je pro jakýkoli bod kromě pólu potřeba jedinečné znázornění, je obvyklé omezení r na kladná čísla (r > 0) a φ buď interval [0, 360°) nebo interval (−180°, 180°], což jsou v radiánech (0, 2π] nebo [Π, π).[12] Další konvence s odkazem na obvyklou codomain z arktanová funkce, je umožnit libovolné nenulové skutečné hodnoty radiální složky a omezit polární úhel na (−90°, 90°]. Ve všech případech jedinečný azimut pro pól (r = 0) musí být vybráno, např. φ = 0.
Převod mezi polárními a kartézskými souřadnicemi
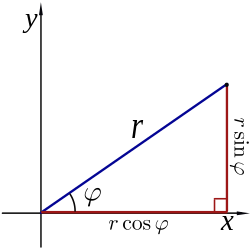


Polární souřadnice r a φ lze převést na Kartézské souřadnice X a y pomocí trigonometrické funkce sinus a kosinus:

Kartézské souřadnice X a y lze převést na polární souřadnice r a φ s r ≥ 0 a φ v intervalu (-π, π] autor:[13]
- (jako v Pythagorova věta nebo Euklidovská norma ), a


kde atan2 je běžná variace na arkustangens funkce definovaná jako

Li r nejprve se vypočítá výše, poté tento vzorec pro φ lze uvést o něco jednodušeji pomocí standardu arckosin funkce:

Hodnota φ výše je hlavní hodnota funkce komplexního čísla arg aplikován na X + iy. Úhel v rozsahu [0, 2π) lze získat přidáním 2π na hodnotu v případě, že je záporná (jinými slovy když y je negativní).
Polární rovnice křivky
Rovnice definující an algebraická křivka vyjádřený v polárních souřadnicích je znám jako a polární rovnice. V mnoha případech lze takovou rovnici jednoduše určit definováním r jako funkce z φ. Výsledná křivka se potom skládá z bodů formuláře (r(φ), φ) a lze jej považovat za graf polární funkce r. Všimněte si, že na rozdíl od kartézských souřadnic nezávislá proměnná φ je druhý vstup do objednaného páru.
Různé formy symetrie lze odvodit z rovnice polární funkce r. Li r(−φ) = r(φ) křivka bude symetrická kolem vodorovného (0 ° / 180 °) paprsku, pokud r(π − φ) = r(φ) bude symetrický kolem vertikálního (90 ° / 270 °) paprsku, a pokud r(φ - α) = r(φ) bude to rotačně symetrické od α ve směru hodinových ručiček a proti směru hodinových ručiček o tyči.
Kvůli kruhové povaze polárního souřadnicového systému lze mnoho křivek popsat poměrně jednoduchou polární rovnicí, zatímco jejich kartézská forma je mnohem složitější. Mezi nejznámější z těchto křivek patří polární růže, Archimédova spirála, lemniscate, Limaçon, a kardioidní.
Pro kružnici, přímku a polární růži níže se rozumí, že neexistují žádná omezení týkající se oblasti a rozsahu křivky.
Kruh
Obecná rovnice pro kruh se středem v (r0, ) a poloměr A je


To lze zjednodušit různými způsoby, aby vyhovovaly konkrétnějším případům, jako je rovnice

pro kruh se středem u pólu a poloměru A.[14]
Když r0 = A, nebo když počátek leží na kružnici, stane se rovnice

Obecně lze rovnici vyřešit pro rdávat

řešení se znaménkem minus před druhou odmocninou dává stejnou křivku.
Čára
Radiální přímky (ty, které procházejí pólem) jsou reprezentovány rovnicí

kde γ je elevační úhel přímky; to je γ = arktan m, kde m je sklon přímky v kartézském souřadnicovém systému. Neradiální čára, která protíná radiální čáru φ = γ kolmo na místě (r0, γ) má rovnici

Jinak uvedeno (r0, γ) je bod, ve kterém tečna protíná imaginární kruh o poloměru r0.
Polární růže

A polární růže je matematická křivka, která vypadá jako okvětní lístek, a kterou lze vyjádřit jako jednoduchou polární rovnici,

pro libovolnou konstantu γ0 (včetně 0). Li k je celé číslo, tyto rovnice vytvoří a k-kvalitní růže, pokud k je zvláštní nebo 2k-kvalitní růže, pokud k je sudý. Li k je racionální, ale není celé číslo, může se vytvořit tvar podobný růži, ale s překrývajícími se okvětními lístky. Všimněte si, že tyto rovnice nikdy nedefinují růži s okvětními lístky 2, 6, 10, 14 atd. The proměnná A přímo představuje délku nebo amplitudu okvětních lístků růže, zatímco k se vztahuje k jejich prostorové frekvenci. Konstanta γ0 lze považovat za fázový úhel.
Archimédova spirála
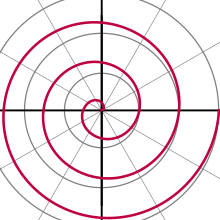
The Archimédova spirála je spirála, kterou objevil Archimedes, kterou lze také vyjádřit jako jednoduchou polární rovnici. Představuje to rovnice

Změna parametru A otočí spirálu, zatímco b ovládá vzdálenost mezi rameny, která je pro danou spirálu vždy konstantní. Archimédova spirála má dvě ramena, jedno pro φ > 0 a jeden pro φ < 0. Obě ramena jsou hladce spojena s pólem. Pořízením zrcadlového obrazu jednoho ramene přes čáru 90 ° / 270 ° získáte druhé rameno. Tato křivka je pozoruhodná jako jedna z prvních křivek po kuželovité úseky, který bude popsán v matematickém pojednání a je ukázkovým příkladem křivky, kterou nejlépe definuje polární rovnice.
Kuželosečky
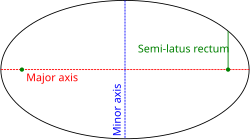
A kuželovitý řez s jedním zaostřením na pól a druhým někde na paprsku 0 ° (takže kuželovitý hlavní osa leží podél polární osy) je dán vztahem:

kde E je excentricita a je semi-latus rectum (kolmá vzdálenost v ohnisku od hlavní osy ke křivce). Li E > 1, tato rovnice definuje a hyperbola; -li E = 1, definuje a parabola; a pokud E < 1, definuje elipsa. Zvláštní případ E = 0 druhé z nich má za následek kruh o poloměru .

Průnik dvou polárních křivek
Grafy dvou polárních funkcí a mají možné průniky tří typů:


- V počátku, pokud rovnice a mít alespoň jedno řešení.
- Všechny body kde jsou řešení rovnice kde je celé číslo.
- Všechny body kde jsou řešení rovnice kde je celé číslo.


![[g( heta _{i}), heta _{i}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819)




Složitá čísla
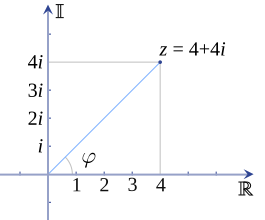
Každý komplexní číslo může být reprezentován jako bod v složité letadlo, a lze je tedy vyjádřit zadáním buď kartézských souřadnic bodu (nazývaných obdélníkový nebo kartézský tvar) nebo polárních souřadnic bodu (nazývaných polární tvar). Složité číslo z mohou být reprezentovány v obdélníkovém tvaru jako

kde i je imaginární jednotka, nebo lze alternativně psát v polárním tvaru (pomocí uvedených převodních vzorců výše ) tak jako

a odtud jako

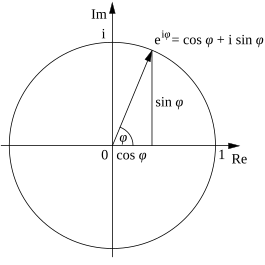
kde E je Eulerovo číslo, které jsou ekvivalentní, jak ukazuje Eulerův vzorec.[15] (Všimněte si, že tento vzorec, stejně jako všechny, které zahrnují exponenciály úhlů, předpokládá, že úhel φ je vyjádřen v radiány.) Pro převod mezi obdélníkovou a polární formou komplexního čísla jsou uvedeny převodní vzorce výše může být použito.
Pro provoz násobení, divize, a umocňování komplexních čísel je obecně mnohem jednodušší pracovat s komplexními čísly vyjádřenými spíše v polárním než obdélníkovém tvaru. Ze zákonů umocňování:
- Násobení
- Divize
- Umocňování (De Moivreův vzorec )



Počet
Počet lze použít na rovnice vyjádřené v polárních souřadnicích.[16][17]
Úhlová souřadnice φ je v této části vyjádřeno v radiánech, což je běžná volba při výpočtu počtu.
Diferenciální počet
Použitím X = r cos φ a y = r hřích φ, lze odvodit vztah mezi deriváty v kartézských a polárních souřadnicích. Pro danou funkci u(X,y), z toho vyplývá, že (výpočtem jeho deriváty celkem )
![{displaystyle { egin{aligned}r{frac {partial u}{partial r}}&=r{frac {partial u}{partial x}}{frac {partial x}{partial r}}+r{frac {partial u}{partial y}}{frac {partial y}{partial r}},[2pt]{frac {partial u}{partial varphi }}&={frac {partial u}{partial x}}{frac {partial x}{partial varphi }}+{frac {partial u}{partial y}}{frac {partial y}{partial varphi }},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b982a2b1aa08dfd5219a468797b5dc746f5a78f)
nebo
![{displaystyle { egin{aligned}r{frac {partial u}{partial r}}&=r{frac {partial u}{partial x}}cos varphi +r{frac {partial u}{partial y}}sin varphi =x{frac {partial u}{partial x}}+y{frac {partial u}{partial y}},[2pt]{frac {partial u}{partial varphi }}&=-{frac {partial u}{partial x}}rsin varphi +{frac {partial u}{partial y}}rcos varphi =-y{frac {partial u}{partial x}}+x{frac {partial u}{partial y}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/242d3229bd257a7adb99575630bbacfea3a2f04c)
Proto máme následující vzorce:
![{displaystyle { egin{aligned}r{frac {partial }{partial r}}&=x{frac {partial }{partial x}}+y{frac {partial }{partial y}}[2pt]{frac {partial }{partial varphi }}&=-y{frac {partial }{partial x}}+x{frac {partial }{partial y}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/215d2d501494c09b74faa68ec3b221f47eea0b4f)
Pomocí transformace inverzních souřadnic lze mezi deriváty odvodit analogický vzájemný vztah. Vzhledem k funkci u(r,φ), z toho vyplývá, že
![{displaystyle { egin{aligned}{frac {partial u}{partial x}}&={frac {partial u}{partial r}}{frac {partial r}{partial x}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial x}},[2pt]{frac {partial u}{partial y}}&={frac {partial u}{partial r}}{frac {partial r}{partial y}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial y}},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/baa953cd580e2e2d99132359e162f159874d9cfe)
nebo
![{displaystyle { egin{aligned}{frac {partial u}{partial x}}&={frac {partial u}{partial r}}{frac {x}{sqrt {x^{2}+y^{2}}}}-{frac {partial u}{partial varphi }}{frac {y}{x^{2}+y^{2}}}[2pt]&=cos varphi {frac {partial u}{partial r}}-{frac {1}{r}}sin varphi {frac {partial u}{partial varphi }},[2pt]{frac {partial u}{partial y}}&={frac {partial u}{partial r}}{frac {y}{sqrt {x^{2}+y^{2}}}}+{frac {partial u}{partial varphi }}{frac {x}{x^{2}+y^{2}}}[2pt]&=sin varphi {frac {partial u}{partial r}}+{frac {1}{r}}cos varphi {frac {partial u}{partial varphi }}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9292d372faee28d2b8616abfa07a3b40f9dbe681)
Proto máme následující vzorce:
![{displaystyle { egin{aligned}{frac {partial }{partial x}}&=cos varphi {frac {partial }{partial r}}-{frac {1}{r}}sin varphi {frac {partial }{partial varphi }}[2pt]{frac {partial }{partial y}}&=sin varphi {frac {partial }{partial r}}+{frac {1}{r}}cos varphi {frac {partial }{partial varphi }}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66ee9f25bdce2fef26323e8ff0c9cb89d56e01ac)
Vyhledat kartézský sklon tečny k polární křivce r(φ) v kterémkoli daném bodě je křivka nejprve vyjádřena jako soustava parametrické rovnice.

Diferenciace obě rovnice s ohledem na φ výnosy
![{displaystyle { egin{aligned}{frac {dx}{dvarphi }}&=r'(varphi )cos varphi -r(varphi )sin varphi [2pt]{frac {dy}{dvarphi }}&=r'(varphi )sin varphi +r(varphi )cos varphi .end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)
Vydělením druhé rovnice první získáme karteziánský sklon tečny ke křivce v bodě (r(φ), φ):

Další užitečné vzorce včetně divergence, gradientu a laplaciánu v polárních souřadnicích viz křivočaré souřadnice.
Integrální počet (délka oblouku)
Délka oblouku (délka úsečky) definovaná polární funkcí se zjistí integrací přes křivku r(φ). Nechat L označte tuto délku podél křivky počínaje od bodů A až do bodu B, kde tyto body odpovídají φ = A a φ = b takhle 0 < b − A < 2π. Délka L je dán následujícím integrálem
![L = int _ {a} ^ {b} {sqrt {left [r (varphi) ight] ^ {2} + left [{frac {dr (varphi)} {dvarphi}} ight] ^ {2}}} dvarphi](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)
Integrální počet (plocha)

Nechat R označuje oblast ohraničenou křivkou r(φ) a paprsky φ = A a φ = b, kde 0 < b − A ≤ 2π. Poté oblast R je
![{frac {1} {2}} int _ {a} ^ {b} vlevo [r (varphi) ight] ^ {2}, dvarphi.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)


Tento výsledek lze najít následovně. Nejprve interval [A, b] je rozdělen do n podintervaly, kde n je libovolné kladné celé číslo. Tedy Δφ, míra úhlu každého subintervalu, se rovná b − A (celková úhlová míra intervalu) vydělená n, počet podintervalů. Pro každý podinterval i = 1, 2, ..., n, nechť φi být středem podintervalu a sestrojit a sektor se středem u pólu, poloměrem r(φi), středový úhel Δφ a délka oblouku r(φi) Δφ. Plocha každého vytvořeného sektoru se tedy rovná
![left [r (varphi _ {i}) ight] ^ {2} pi cdot {frac {Delta varphi} {2pi}} = {frac {1} {2}} left [r (varphi _ {i}) ight] ^ {2} Delta varphi.](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)
Celková plocha všech sektorů tedy je

Jako počet podintervalů n se zvyšuje, aproximace oblasti se stále zlepšuje. V limitu jako n → ∞, součet se stává Riemannova suma pro výše uvedený integrál.
Mechanické zařízení, které počítá plošné integrály, je planimetr, který měří plochu rovinných obrazců jejich vysledováním: replikuje integraci v polárních souřadnicích přidáním spoje, takže 2-prvek vazba účinky Greenova věta, převod kvadratického polárního integrálu na lineární integrál.
Zobecnění
Použitím Kartézské souřadnice, prvek nekonečně malé oblasti lze vypočítat jako dA = dx dy. The substituční pravidlo pro více integrálů uvádí, že při použití jiných souřadnic Jacobian je třeba vzít v úvahu determinant vzorce převodu souřadnic:
![{displaystyle J = det {frac {částečné (x, y)} {částečné (r, varphi)}} = {egin {vmatrix} {frac {částečné x} {částečné r}} & {frac {částečné x} {částečné varphi}} [2pt] {frac {částečné y} {částečné r}} & {frac {částečné y} {částečné varphi}} konec {vmatrix}} = {egin {vmatrix} cos varphi & -rsin varphi sin varphi & rcos varphi end {vmatrix}} = rcos ^ {2} varphi + rsin ^ {2} varphi = r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)
Proto lze plošný prvek v polárních souřadnicích zapsat jako

Nyní lze funkci, která je uvedena v polárních souřadnicích, integrovat takto:

Tady, R je stejná oblast jako výše, konkrétně oblast uzavřená křivkou r(ϕ) a paprsky φ = A a φ = b. Vzorec pro oblast R výše uvedené je vyvoláno pomocí F shodně se rovná 1.

Překvapivější aplikace tohoto výsledku přináší Gaussův integrál, zde označeno K.:

Vektorový počet
Vektorový počet lze také použít na polární souřadnice. Pro rovinný pohyb nechte být pozičním vektorem (r cos (φ), r hřích(φ)), s r a φ v závislosti na čase t.

Definujeme jednotkové vektory

ve směru a

v rovině pohybu kolmé na radiální směr, kde je jednotkový vektor kolmý k rovině pohybu.

Pak

Odstředivé a Coriolisovy výrazy



Termín se někdy označuje jako dostředivé zrychlenía termín jako Coriolisovo zrychlení. Například viz Shankar.[18]


Poznámka: tyto výrazy, které se objevují, když je zrychlení vyjádřeno v polárních souřadnicích, jsou matematickým důsledkem diferenciace; objevují se vždy, když jsou použity polární souřadnice. V rovinné dynamice částic se tato zrychlení objeví při nastavení Newtonova druhý zákon pohybu v otočném referenčním rámci. Zde se tyto zvláštní termíny často nazývají fiktivní síly; fiktivní, protože jsou jednoduše výsledkem změny souřadnicového rámce. To neznamená, že neexistují, ale existují pouze v rotujícím rámu.
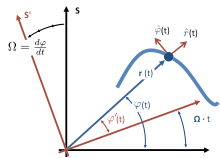
Společně rotující rám
U částice v rovinném pohybu je jeden přístup k přikládání fyzického významu těmto pojmům založen na konceptu okamžitého společně rotující referenční rámec.[19] Chcete-li definovat souběžně rotující rám, nejprve se vybere počátek, od kterého je vzdálenost r(t) k částice je definován. Je nastavena osa otáčení, která je kolmá na rovinu pohybu částice a prochází tímto počátkem. Pak ve vybraný okamžik t, rychlost otáčení souběžně se otáčejícího rámu Ω je nastavena tak, aby odpovídala rychlosti otáčení částice kolem této osy, dφ/dt. Dále pojmy zrychlení v setrvačném rámci souvisejí s pojmy v souběžném rámu. Nechť je umístění částice v setrvačném rámci (r (t), φ(t)) a v souběžně se otáčejícím rámu být (r (t), φ′ (T)). Protože společně rotující rám se otáčí stejnou rychlostí jako částice, dφ′/dt = 0. Fiktivní odstředivá síla v souběžném rámu je mrΩ2, radiálně směrem ven. Rychlost částice v společně rotujícím rámu je také radiálně ven, protože dφ′/dt = 0. The fiktivní Coriolisova síla proto má hodnotu −2m(dr/dt) Ω, ukázal ve směru zvyšování φ pouze. Použitím těchto sil v druhém Newtonově zákoně tedy zjistíme:

kde nad tečkami představují časové diferenciace a F je čistá skutečná síla (na rozdíl od fiktivních sil). Z hlediska komponent se tato vektorová rovnice stává:

které lze porovnat s rovnicemi pro setrvačný rámec:

Toto srovnání, plus uznání, že podle definice společně rotujícího rámu v čase t má rychlost otáčení Ω = dφ/dt, ukazuje, že můžeme interpretovat pojmy v zrychlení (vynásobené hmotností částice), které se nacházejí v inerciálním rámci, jako zápor odstředivých a Coriolisových sil, které by byly vidět v okamžitém neinerciálním souběžném rámu .
Pro obecný pohyb částice (na rozdíl od jednoduchého kruhového pohybu) se odstředivé a Coriolisovy síly v referenčním rámci částice běžně označují jako okamžité oscilační kruh jeho pohybu, ne do pevného středu polárních souřadnic. Další podrobnosti viz dostředivá síla.
Diferenciální geometrie
V moderní terminologii diferenciální geometrie, poskytují polární souřadnice souřadnicové grafy pro diferencovatelné potrubí ℝ2 {(0,0)}, letadlo minus počátek. V těchto souřadnicích je euklidovský metrický tenzor darováno




Rozšíření ve 3D
Polární souřadný systém je rozšířen do tří dimenzí se dvěma různými souřadnými systémy, válcovitý a sférický souřadný systém.
Aplikace
Polární souřadnice jsou dvourozměrné, a proto je lze použít pouze tam, kde polohy bodů leží v jediné dvojrozměrné rovině. Jsou nejvhodnější v každém kontextu, kde uvažovaný jev je neodmyslitelně spojen se směrem a délkou od středu. Například výše uvedené příklady ukazují, jak k definování křivek postačují základní polární rovnice - například Archimédova spirála - jejíž rovnice v kartézském souřadném systému by byla mnohem složitější. Mnoho fyzikálních systémů - například těch, které se zabývají těly pohybujícími se kolem centrálního bodu nebo jevy pocházejícími z centrálního bodu - je navíc jednodušší a intuitivnější pro modelování pomocí polárních souřadnic. Počáteční motivací pro zavedení polárního systému bylo studium oběžník a orbitální pohyb.
Polární souřadnice jsou často používány v navigace jako cíl nebo směr jízdy lze uvést úhel a vzdálenost od uvažovaného objektu. Například, letadlo pro navigaci použijte mírně upravenou verzi polárních souřadnic. V tomto systému, který se obecně používá pro jakýkoli druh navigace, se paprsek 0 ° obecně nazývá kurz 360 a úhly pokračují v ve směru hodinových ručiček ve směru, spíše než proti směru hodinových ručiček, jako v matematickém systému. Okruh 360 odpovídá magnetický sever, zatímco nadpisy 90, 180 a 270 odpovídají magnetickému východu, jihu a západu.[20] Letadlo letící 5 námořních mil na východ bude tedy cestovat 5 jednotkami v kurzu 90 (číst nula-niner-nula podle kontrola letového provozu ).[21]
Modelování
Zobrazování systémů radiální symetrie poskytují přirozené nastavení pro polární souřadnicový systém, přičemž centrální bod působí jako pól. Ukázkovým příkladem tohoto použití je rovnice toku podzemní vody při aplikaci na radiálně symetrické jamky. Systémy s a radiální síla jsou také dobrými kandidáty na použití polárního souřadnicového systému. Mezi tyto systémy patří gravitační pole, kteří poslouchají zákon inverzního čtverce, stejně jako systémy s bodové zdroje, jako rádiové antény.
Radiálně asymetrické systémy lze také modelovat s polárními souřadnicemi. Například a mikrofon je vzor vyzvednutí ilustruje jeho proporcionální odezvu na příchozí zvuk z daného směru a tyto vzory lze reprezentovat jako polární křivky. Křivku pro standardní kardioidní mikrofon, nejběžnější jednosměrný mikrofon, lze znázornit jako r = 0,5 + 0,5 sin (ϕ) na jeho cílové návrhové frekvenci.[22] Vzorek se posouvá směrem k všesměrnosti při nižších frekvencích.
Viz také
- Křivočaré souřadnice
- Seznam kanonických transformací souřadnic
- Log-polární souřadnice
- Polární rozklad
- Jednotkový kruh
Reference
- ^ Brown, Richard G. (1997). Andrew M. Gleason (ed.). Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis. Evanston, Illinois: McDougal Littell. ISBN 0-395-77114-5.
- ^ Přátelský, Michael (24. srpna 2009). „Milníky v historii tematické kartografie, statistické grafiky a vizualizace dat“ (PDF).
- ^ Král, David A. (2005). „Posvátná geografie islámu“. V Koetsier, Teun; Luc, Bergmans (eds.). Mathematics and the Divine: A Historical Study. Amsterdam: Elsevier. 162–78. ISBN 0-444-50328-5.CS1 maint: ref = harv (odkaz)
- ^ Král (2005, p. 169 ). Výpočty byly tak přesné, jakých bylo možné dosáhnout při omezeních vyplývajících z jejich předpokladu, že Země byla dokonalá koule.
- ^ A b Coolidge, Juliane (1952). „Počátek polárních souřadnic“. Americký matematický měsíčník. Mathematical Association of America. 59 (2): 78–85. doi:10.2307/2307104. JSTOR 2307104.
- ^ Boyer, C. B. (1949). "Newton jako původce polárních souřadnic". Americký matematický měsíčník. Mathematical Association of America. 56 (2): 73–78. doi:10.2307/2306162. JSTOR 2306162.
- ^ Miller, Jeff. „Nejstarší známá použití některých slov matematiky“. Citováno 2006-09-10.
- ^ Smith, David Eugene (1925). Dějiny matematiky, sv. II. Boston: Ginn and Co. str. 324.
- ^ Serway, Raymond A .; Jewett, Jr., John W. (2005). Principy fyziky. Brooks / Cole - Thomson Learning. ISBN 0-534-49143-X.CS1 maint: více jmen: seznam autorů (odkaz)
- ^ „Polární souřadnice a grafy“ (PDF). 2006-04-13. Citováno 2006-09-22.[trvalý mrtvý odkaz ]
- ^ Lee, Theodore; David Cohen; David Sklar (2005). Precalculus: With Unit-Circle Trigonometry (Čtvrté vydání). Thomson Brooks / Cole. ISBN 0-534-40230-5.
- ^ Stewart, Ian; David Tall (1983). Komplexní analýza (Stopařův průvodce letadlem). Cambridge University Press. ISBN 0-521-28763-4.
- ^ Torrence, Bruce Follett; Eve Torrence (1999). Studentův úvod do Mathematica. Cambridge University Press. ISBN 0-521-59461-8.
- ^ Claeys, Johan. "Polární souřadnice". Archivovány od originál dne 2006-04-27. Citováno 2006-05-25.
- ^ Smith, Julius O. (2003). „Eulerova identita“. Matematika diskrétní Fourierovy transformace (DFT). Publikování W3K. ISBN 0-9745607-0-7. Archivovány od originál dne 2006-09-15. Citováno 2006-09-22.
- ^ Husch, Lawrence S. „Oblasti ohraničené polárními křivkami“. Citováno 2006-11-25.
- ^ Lawrence S. Husch. „Tečny k polárním grafům“. Citováno 2006-11-25.
- ^ Ramamurti Shankar (1994). Principy kvantové mechaniky (2. vyd.). Springer. p. 81. ISBN 0-306-44790-8.
- ^ Následující diskusi viz John R Taylor (2005). Klasická mechanika. University Science Books. p. § 9.10, s. 358–359. ISBN 1-891389-22-X.
- ^ Santhi, Sumrit. „Aircraft Navigation System“. Citováno 2006-11-26.
- ^ „Nouzové postupy“ (PDF). Archivovány od originál (PDF) dne 03.06.2013. Citováno 2007-01-15.
- ^ Earle, Johne (2005). Příručka nahrávacího inženýrství (Čtvrté vydání). Springer. ISBN 0-387-28470-2.
Obecné odkazy
- Adams, Robert; Christopher Essex (2013). Calculus: kompletní kurz (Osmá ed.). Pearson Canada Inc. ISBN 978-0-321-78107-9.
- Anton, Howard; Irl Bivens; Stephen Davis (2002). Počet (Sedmé vydání). Anton Textbooks, Inc. ISBN 0-471-38157-8.
- Finney, Ross; George Thomas; Franklin Demana; Bert Waits (červen 1994). Kalkul: grafický, numerický, algebraický (Verze s jednou proměnnou). Addison-Wesley Publishing Co. ISBN 0-201-55478-X.