Oscilační kruh - Osculating circle

v diferenciální geometrie křivek, oscilační kruh dostatečně hladké roviny křivka v daném bodě p na křivce byl tradičně definován jako kruh procházející p a pár dalších bodů na křivce nekonečně blízko k p. Jeho střed leží na vnitřní straně normální linka, a jeho zakřivení definuje zakřivení dané křivky v daném bodě. Tento kruh, který je jedním ze všech tečné kruhy v daném bodě, který se nejvíce blíží křivce, byl pojmenován Circulus osculans (Latinsky „kissing circle“) od Leibniz.
Volá se střed a poloměr oscilační kružnice v daném bodě střed zakřivení a poloměr zakřivení křivky v tomto bodě. Geometrickou konstrukci popsal Isaac Newton v jeho Principia:
Na všech místech je dána rychlost, s jakou těleso popisuje danou postavu, pomocí sil namířených na nějaký společný střed: najít tento střed.
— Isaac Newton, Principia; NÁVRH V. PROBLÉM I.
Netechnický popis
Představte si auto, které se pohybuje po zakřivené silnici na obrovské ploché rovině. Najednou se v jednom bodě podél silnice zablokuje volant ve své současné poloze. Poté se auto pohybuje v kruhu, který „líbá“ silnici v místě zamykání. The zakřivení kruhu v tomto bodě se rovná té silnice. Tento kruh je oscilační kruh silniční křivky v tomto bodě.
Matematický popis
Nechat (s) být a pravidelná parametrická rovinná křivka, kde s je délka oblouku (dále jen přirozený parametr ). To určuje jednotkový tangens vektor T(s), normální vektor jednotky N(s), podepsané zakřivení k (s) a poloměr zakřivení R (s) v každém bodě, pro který s je složen:


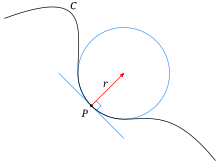
Předpokládejme to P je bod na y kde k ≠ 0. Odpovídajícím středem zakřivení je bod Q na dálku R podél N, stejným směrem, pokud k je pozitivní a v opačném směru, pokud k je negativní. Kruh se středem v Q a s poloměrem R se nazývá oscilační kruh na křivku y na místě P.
Li C je pravidelná prostorová křivka, pak je oscilační kruh definován podobným způsobem pomocí hlavní normální vektor N. Leží v oscilační rovina, rovina překlenutá tečnami a hlavními normálovými vektory T a N na místě P.
Rovinná křivka může být také uvedena v jiné pravidelné parametrizaci

kde regulární znamená, že pro všechny . Pak vzorce pro podepsané zakřivení k(t), normální jednotkový vektor N(t), poloměr zakřivení R(t) a střed Q(t) oscilační kružnice jsou




Kartézské souřadnice
Můžeme získat střed oscilační kružnice v kartézských souřadnicích, pokud dosadíme a pro některé F funkce. Pokud provedeme výpočty, výsledky pro souřadnice X a Y středu oscilační kružnice jsou:



Vlastnosti
Pro křivku C vzhledem k dostatečně plynulým parametrickým rovnicím (dvakrát spojitě diferencovatelné) lze oscilační kružnici získat omezujícím postupem: je to mez kružnic procházejících třemi odlišnými body na C jak se tyto body blíží P.[2] To je zcela analogické s konstrukcí tečna na křivku jako limit sečnaných čar skrz páry odlišných bodů C blížící se P.
Oscilační kruh S na rovinnou křivku C v pravidelném bodě P lze charakterizovat následujícími vlastnostmi:
- Kruh S prochází P.
- Kruh S a křivka C mít společná tečna linka na P, a tedy společná normální linka.
- Blízko k P, vzdálenost mezi body křivky C a kruh S v normálním směru se rozpadá jako kostka nebo vyšší síla vzdálenosti do P v tangenciálním směru.
To se obvykle vyjadřuje jako „křivka a její oscilační kruh mají druhý nebo vyšší řád Kontakt " na P. Volně řečeno, vektorové funkce představující C a S dohodnout společně s jejich prvním a druhým derivátem na P.
Pokud je derivace zakřivení vzhledem k s je nenulová v P pak oscilační kruh protíná křivku C na P. Body P při kterém je derivace zakřivení nulová vrcholy. Li P je vrchol C a jeho oscilační kruh mají kontakt řádu nejméně tří. Pokud má navíc zakřivení nenulovou hodnotu místní maximum nebo minimálně na P pak se oscilační kruh dotkne křivky C na P ale nepřekročí to.
Křivka C lze získat jako obálka jedné parametrické rodiny jeho oscilačních kruhů. Jejich centra, tj. Středy zakřivení, tvoří další křivku zvanou evoluce z C. Vrcholy C odpovídají singulárním bodům na jeho vývoji.
V jakémkoli oblouku křivky C ve kterém je zakřivení monotónní (tj. od jakéhokoli vrchol křivky), všechny oscilační kruhy jsou disjunktní a vnořené do sebe. Tento výsledek je znám jako Tait-Kneserova věta.[1]
Příklady
Parabola

Pro parabolu

poloměr zakřivení je

Na vrcholu poloměr zakřivení se rovná R (0) = 0,5 (viz obrázek). Parabola má kontakt čtvrtého řádu se svým oscilačním kruhem. Pro velké t poloměr zakřivení se zvětší ~ t3, to znamená, že se křivka stále více narovnává.

Lissajousova křivka

A Lissajousova křivka s poměrem frekvencí (3: 2) lze parametrizovat následujícím způsobem

Má podepsané zakřivení k(t), normální jednotkový vektor N(t) a poloměr zakřivení R(t) dána


a

Na obrázku je animace. Tam je „vektor zrychlení“ druhou derivací s respektem k délka oblouku .


Cykloidní

A cykloidní s poloměrem r lze parametrizovat takto:

Jeho zakřivení je dáno následujícím vzorcem:[3]

který dává:

Viz také
Poznámky
- ^ A b Ghys, Étienne; Tabachnikov, Sergej; Timorin, Vladlen (2013). „Oscilační křivky: kolem Tait-Kneserovy věty“. Matematický zpravodaj. 35 (1): 61–66. arXiv:1207.5662. doi:10.1007 / s00283-012-9336-6. PAN 3041992. S2CID 18183204.
- ^ Vlastně bod P plus dva další body, jeden na obou stranách P udělám. Viz Jehněčí (on-line): Horace Lamb (1897). Základní kurz nekonečně malého počtu. University Press. p.406.
oscilační kruh.
- ^ Weisstein, Eric W. "Cykloidní". MathWorld.
Další čtení
Některé historické poznámky ke studiu zakřivení viz
- Grattan-Guinness a H. J. M. Bos (2000). Od kalkulu k teorii množin 1630-1910: Úvodní historie. Princeton University Press. p. 72. ISBN 0-691-07082-2.
- Roy Porter, editor (2003). Cambridge History of Science: v4 - Věda osmnáctého století. Cambridge University Press. p. 313. ISBN 0-521-57243-6.
Pro použití na manévrování vozidel viz
- JC Alexander a JH Maddocks (1988): O manévrování vozidel doi:10.1137/0148002
- Murray S. Klamkin (1990). Problémy v aplikované matematice: výběr z přehledu SIAM. Společnost pro průmyslovou a aplikovanou matematiku. p. 1. ISBN 0-89871-259-9.