Autonomní systém (matematika) - Autonomous system (mathematics)
v matematika, an autonomní systém nebo autonomní diferenciální rovnice je Systém z obyčejné diferenciální rovnice který výslovně nezávisí na nezávislé proměnné. Když je proměnná čas, také se jim říká časově neměnné systémy.
Mnoho zákonů v fyzika, kde se obvykle předpokládá nezávislá proměnná čas, jsou vyjádřeny jako autonomní systémy, protože se předpokládá přírodní zákony které platí nyní, jsou totožné s těmi pro jakýkoli bod v minulosti nebo budoucnosti.
Autonomní systémy úzce souvisí s dynamické systémy. Libovolný autonomní systém lze transformovat na dynamický systém[Citace je zapotřebí ] a za použití velmi slabých předpokladů[Citace je zapotřebí ], lze dynamický systém přeměnit na autonomní systém[Citace je zapotřebí ].
Definice
An autonomní systém je soustava obyčejných diferenciálních rovnic formuláře

kde X bere hodnoty v n-dimenzionální Euklidovský prostor; t se často interpretuje jako čas.
Rozlišuje se od systémů diferenciálních rovnic formy

ve kterém zákon řídící vývoj systému dělá ne závisí pouze na aktuálním stavu systému, ale také na parametru t, opět často interpretováno jako čas; takové systémy nejsou ze své podstaty autonomní.
Vlastnosti
Nechat být jedinečným řešením problém počáteční hodnoty pro autonomní systém

- .

Pak řeší

- .

Opravdu, označení my máme a , tím pádem



- .

Pro počáteční podmínku je ověření triviální,
- .

Příklad
Rovnice je autonomní, protože nezávislá proměnná, řekněme tomu , se v rovnici výslovně neobjevuje. Chcete-li vykreslit svahové pole a isocline pro tuto rovnici lze použít následující kód v GNU oktáva /MATLAB


Ffun = @(X, Y)(2 - Y) .* Y; % funkce f (x, y) = (2-y) y[X, Y] = mřížka(0:.2:6, - 1:.2:3); % zvolte velikost grafuDY = Ffun(X, Y); DX = ty(velikost(DY)); % vygeneruje hodnoty grafutoulec(X, Y, DX, DY, 'k'); % vykreslí směrové pole černědržet na;obrys(X, Y, DY, [0 1 2], 'G'); % přidejte isoclines (0 1 2) zelenětitul('Sklon pole a izoklinů pro f (x, y) = (2-y) y')Z grafu lze pozorovat, že funkce je -invariant, a tak je tvar řešení, tj. pro jakoukoli směnu .



Symbolické řešení rovnice v MATLAB spuštěním
y = vyřešit('Dy = (2-y) * y', 'X'); % vyřešit rovnici symbolickyzískáme dva rovnováha řešení, a a třetí řešení zahrnující neznámou konstantu ,



y(3) = - 2 / (exp(C3 - 2 * X) - 1)Vyzvednutí některých konkrétních hodnot pro počáteční stav, můžeme přidat graf několika řešení
y1 = vyřešit('Dy = (2-y) * y', 'y (1) = 1', 'X'); % symbolicky vyřeší problém s počáteční hodnotouy2 = vyřešit('Dy = (2-y) * y', 'y (2) = 1', 'X'); % pro různé počáteční podmínkyy3 = vyřešit('Dy = (2-y) * y', 'y (3) = 1', 'X'); y4 = vyřešit('Dy = (2-y) * y', 'y (1) = 3', 'X');y5 = vyřešit('Dy = (2-y) * y', 'y (2) = 3', 'X'); y6 = vyřešit('Dy = (2-y) * y', 'y (3) = 3', 'X');ezplot(y1, [0 6]); ezplot(y2, [0 6]); % vykreslení řešeníezplot(y3, [0 6]); ezplot(y4, [0 6]); ezplot(y5, [0 6]); ezplot(y6, [0 6]);titul(„Svahové pole, izokliny a řešení pro f (x, y) = (2-y) y“)legenda('Svahové pole', „Isoclines“, „Řešení y_ {1..6}“);text([1 2 3], [1 1 1], strcat('šipka vlevo', {„y_1“, 'y_2', 'y_3'}));text([1 2 3], [3 3 3], strcat('šipka vlevo', {'y_4', 'y_5', 'y_6'}));mřížka na;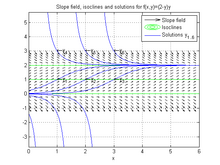
Kvalitativní analýza
Autonomní systémy lze kvalitativně analyzovat pomocí fázový prostor; v případě jedné proměnné je to fázová linka.
Techniky řešení
Následující techniky platí pro jednorozměrné autonomní diferenciální rovnice. Libovolná jednorozměrná rovnice řádu je ekvivalentní s -dimenzionální systém prvního řádu (jak je popsáno v Obyčejná diferenciální rovnice # Redukce na systém prvního řádu ), ale ne nutně naopak.

První objednávka
Autonomní rovnice prvního řádu

je oddělitelný, takže to lze snadno vyřešit přeuspořádáním do integrální podoby

Druhá objednávka
Autonomní rovnice druhého řádu

je obtížnější, ale dá se vyřešit[1] zavedením nové proměnné

a vyjádření druhá derivace z (přes řetězové pravidlo ) tak jako

takže se stane původní rovnice

což je rovnice prvního řádu, která neobsahuje žádný odkaz na nezávislou proměnnou a pokud je vyřešen, poskytuje jako funkce . Poté si vzpomeneme na definici :



což je implicitní řešení.
Speciální případ: X'' = F(X)
Zvláštní případ, kdy je nezávislý na



výhody ze samostatného zacházení.[2] Tyto typy rovnic jsou velmi běžné v klasická mechanika protože jsou vždy Hamiltonovské systémy.
Myšlenkou je využití identity (blokování dělení nulou problémy)

který vyplývá z řetězové pravidlo. Kromě toho si všimněte, že obrácením obou stran autonomního systému prvního řádu je možné se okamžitě integrovat s ohledem na :

což je další způsob pohledu na techniku separace proměnných. Přirozenou otázkou tedy je: můžeme něco takového udělat s rovnicemi vyššího řádu? Odpověď je ano pro rovnice druhého řádu, ale je třeba udělat ještě více práce. Druhá derivace musí být vyjádřena jako derivace s ohledem na namísto :

Znovu zdůraznit: čeho bylo dosaženo, je to, že druhá derivace v byl vyjádřen jako derivát v . Původní rovnice druhého řádu může být nakonec integrována:




Toto je implicitní řešení a kromě toho je největším potenciálním problémem neschopnost zjednodušit integrály, což implikuje obtíže nebo nemožnost vyhodnocení integračních konstant.
Speciální případ: X'' = X'n F(X)
Pomocí výše uvedené mentality můžeme rozšířit techniku na obecnější rovnici

kde je nějaký parametr, který se nerovná dvěma. To bude fungovat, protože druhá derivace může být napsána ve formě zahrnující mocninu . Přepsat druhou derivaci, přeskupit a vyjádřit levou stranu jako derivaci:





Vpravo bude +/-, pokud je sudý. Zacházení musí být jiné, pokud :





Vyšší objednávky
Neexistuje analogická metoda řešení autonomních rovnic třetího nebo vyššího řádu. Takové rovnice lze přesně vyřešit, pouze pokud mají například nějakou jinou zjednodušující vlastnost linearita nebo závislost pravé strany rovnice pouze na závislé proměnné[3][4] (tj. ne jeho deriváty). To by nemělo být překvapující vzhledem k tomu, že nelineární autonomní systémy ve třech rozměrech mohou skutečně produkovat chaotický chování, jako je Lorenzův atraktor a Rösslerův atraktor.
S touto mentalitou také nepřekvapuje, že obecné neautonomní rovnice druhého řádu nelze explicitně vyřešit, protože mohou být také chaotické (příkladem je periodicky vynucené kyvadlo)[5]).
Viz také
Reference
- ^ Boyce, William E .; Richard C. DiPrima (2005). Elementární diferenciální rovnice a problémy s hraničním objemem (8. vydání). John Wiley & Sons. str. 133. ISBN 0-471-43338-1.
- ^ Autonomní rovnice druhého řádu na eqworld.
- ^ Autonomní rovnice třetího řádu na eqworld.
- ^ Autonomní rovnice čtvrtého řádu na eqworld.
- ^ Blanchard; Devaney; Hall (2005). Diferenciální rovnice. Brooks / Cole Publishing Co. str. 540–543. ISBN 0-495-01265-3.
| Klasifikace |
|  | ||||||
|---|---|---|---|---|---|---|---|---|
| Řešení |
| |||||||
| Aplikace | ||||||||
| Matematici | ||||||||