Fázový portrét - Phase portrait

A fázový portrét je geometrické znázornění trajektorií a dynamický systém v fázová rovina. Každá sada počátečních podmínek je reprezentována jinou křivkou nebo bodem.
Fázové portréty jsou neocenitelným nástrojem při studiu dynamických systémů. Skládají se z spiknutí typických trajektorií v státní prostor. Tím se odhalí informace, například zda atraktor, a odpuzovač nebo mezní cyklus je k dispozici pro vybranou hodnotu parametru. Koncept topologická ekvivalence je důležité při klasifikaci chování systémů určením, kdy dva různé fázové portréty představují stejné kvalitativní dynamické chování. Atraktor je stabilní bod, který se také nazývá „dřez“. Odpuzovač je považován za nestabilní bod, který je také známý jako „zdroj“.
Graf fázového portrétu dynamického systému zobrazuje trajektorie systému (se šipkami) a stabilní ustálené stavy (s tečkami) a nestabilní ustálené stavy (s kruhy) ve stavovém prostoru. Osy jsou stavových proměnných.
Příklady
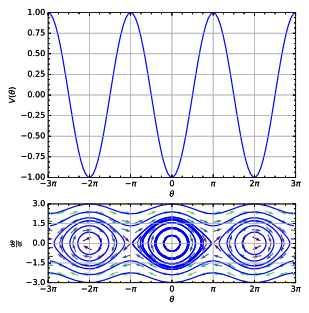
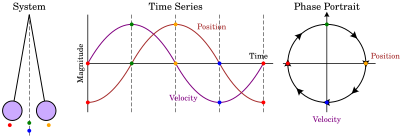
- Jednoduché kyvadlo, viz obrázek (vpravo).
- Jednoduchý harmonický oscilátor kde fázový portrét je tvořen elipsami se středem v počátku, což je pevný bod.
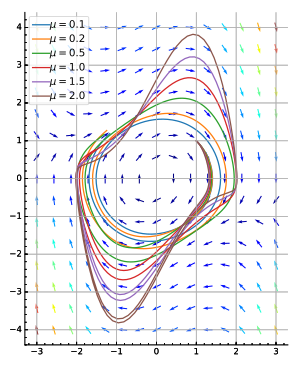
- Van der Pol oscilátor viz obrázek (vpravo dole).
- Rovina parametrů (rovina c) a Mandelbrotova sada
Fázové portréty pro vizualizaci chování systémů obyčejných diferenciálních rovnic
Fázový portrét představuje směrové chování systému ODR. Fázový portrét může indikovat stabilitu systému. [1]
| Nestabilní | Většina řešení systému má v průběhu času sklon k ∞ |
| Asymptoticky stabilní | Všechna řešení systému mají v průběhu času sklon k 0 |
| Neutrálně stabilní | Žádné z řešení systému nemá v průběhu času sklon k ∞, ale ani většina řešení nemá sklon k 0 |
Chování fázového portrétu systému ODR lze určit vlastními hodnotami nebo stopou a determinantem (stopa = λ1 + λ2, determinant = λ1 x λ2) systému.[1]
| Vlastní číslo, Trace, Determinant | Tvar fázového portrétu |
|---|---|
| λ1 & λ2 jsou skutečné a opačné znaménko; Determinant <0 | Sedlo (nestabilní) |
| λ1 & λ2 jsou skutečné a se stejným znaménkem a λ1 ≠ λ2; 0 | Uzel (stabilní, pokud je trasování <0, nestabilní, pokud je trasování> 0) |
| λ1 & λ2 mít skutečnou i imaginární složku; 0 <(trasování2 / 4) | Spirála (stabilní, pokud je stopa <0, nestabilní, pokud je stopa> 0) |
Viz také
Reference
- ^ A b C d Haynes Miller a Arthur Mattuck. 18.03 Diferenciální rovnice. Jaro 2010. Massachusetts Institute of Technology: MIT OpenCourseWare, https://ocw.mit.edu. Licence: Creative Commons BY-NC-SA. (Doplňující poznámky 26 Haynes Miller: https://ocw.mit.edu/courses/mathematics/18-03-differential-equations-spring-2010/readings/supp_notes/MIT18_03S10_chapter_26.pdf)
- Jordan, D. W .; Smith, P. (2007). Nelineární obyčejné diferenciální rovnice (čtvrté vydání). Oxford University Press. ISBN 978-0-19-920824-1. Kapitola 1.
- Steven Strogatz (2001). Nelineární dynamika a chaos: S aplikacemi ve fyzice, biologii, chemii a inženýrství. ISBN 9780738204536.
externí odkazy
- Lineární fázové portréty, MIT Mathlet.