Roj robotické platformy - Swarm robotic platforms
Roj robotické platformy aplikovat rojová robotika[1] ve spolupráci více robotů.[2] Berou inspiraci z přírody (např. kolektivní řešení problémů mechanismy viděné v přírodě jako např včelí med agregace[3][4]). Hlavním cílem je ovládat velké množství roboti (s omezenou schopností snímání / zpracování) k provedení společného úkolu / problému. Hardwarové omezení a náklady na robotické platformy omezují současný výzkum v robotické roji na většinou prováděný simulačním softwarem (např.[5] ARGOS[6]). Na druhou stranu je simulace scénářů roje, která vyžaduje velké množství agentů, extrémně složitá a často nepřesná kvůli špatnému modelování vnějších podmínek a omezení výpočtu.
Porovnání platforem
Několik mobilních robotické platformy byly dříve vyvinuty ke studiu rojových aplikací.
| Robot | Senzor / modul | Pohyb / Max. Rychlost | Velikost / průměr | Čas autonomie | Univerzita / institut | Software s otevřeným zdrojovým kódem | Open source hardware | Popis | obraz |
|---|---|---|---|---|---|---|---|---|---|
| AMiR | vzdálenost, světlo, ložisko | kolo, 10 cm / s | 6,5 cm | 2 h | University Putra Malajsie | AMiR[7] je nízkonákladová robotická platforma roje vyvinutá jako mobilní robot s otevřeným zdrojovým kódem / otevřeným hardwarem. Mnoho výzkumů většinou o agregaci včel[3] (BEECLUST) byla provedena s AMiR (např. Fuzzy rozhodování)[4]). |  | ||
| Alice | vzdálenost, kamera | kolo, 4 cm / s | 2,2 cm | 10 h | École Polytechnique Fédérale de Lausanne (EPFL), Švýcarsko | Alice je rojová robotická platforma postavená ve velmi malé velikosti balení. Alice byla použita v mnoha rojových výzkumných aplikacích, jako je například provedení agregace švábů.[8] | 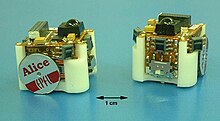 Alice mikrorobot | ||
| Cellulo | strukturovaná hustá kamera pro snímání vzorů, kapacitní dotek | všesměrové kuličkové kolo, 20 cm / s | 7,5 cm | 1-2 h | École Polytechnique Fédérale de Lausanne (EPFL), Švýcarsko | Cellulo[9][10] je jednou z prvních hmatatelných robotických platforem na světě, která kombinuje autonomní roje s hmatatelnou víceuživatelskou hmatatelnou interakcí. Původně vyvinut jako vzdělávací platforma, nyní kromě vzdělávání probíhá výzkum v oblasti rehabilitace, her a interakce člověka s počítačem. |  Roboti Cellulo ve scénáři hmatatelné interakce roje. | ||
| Colias | vzdálenost, světlo, náraz, ložisko, dosah | kolo / 35 cm / s | 4 cm | 1-3 hodiny | CIL ve společnosti University of Lincoln, SPOJENÉ KRÁLOVSTVÍ | Colias[11][12] je nízkonákladová open-source (open-hardware) platforma, která byla vyvinuta pro použití v roj robotický aplikace [13]. |  Roj robota Colias | ||
| Colias-III | Fotoaparát, vzdálenost, světlo, náraz, směr, dosah | kolo, 35 cm / s | 4 cm | 1-3 hodiny | CIL ve společnosti University of Lincoln, SPOJENÉ KRÁLOVSTVÍ | Colias-III[14] je rozšířená verze mikro robota Colias. Byl vyvinut hlavně pro implementaci biologicky inspirovaných systémů vidění. |  Colias-III | ||
| Kapénky | Světlo | vibrace | 4,4 cm | 24 hodin + | Correll Lab v University of Colorado | Kapky jsou otevřené tvrdý - a softwarová experimentální platforma pro rozsáhlý rojový výzkum.[15][16][17] Tým získal prostředky prostřednictvím crowdfunding postavit 1 000 těchto „kapiček“.[18] Nekonečné experimenty díky poháněné podlaze, která funguje jako globální komunikační médium pro programování rojů.[19] | |||
| E-puk | vzdálenost, kamera, ložisko, accele, mic | kolo / 13 cm / s | 7,5 cm | 1-10 hodin | École Polytechnique Fédérale de Lausanne (EPFL), Švýcarsko | E-puk[21] je jedním z nejúspěšnějších robotů a byl primárně navržen pro vzdělávací účely. Díky své jednoduchosti se však také často používá ve výzkumu robotické roje. Má uživatelem vyměnitelné baterie a dobu samostatnosti 2-4 hodiny. |  mobilní robot e-puck | ||
| Jasmín | vzdálenost, světlo, ložisko | kolo, N / A | 3 cm | 1-2 h | University of Stuttgart, Německo | Jasmín[23] je robotická platforma roje, která byla používána v mnoha robotických výzkumech roje.[3] |  Roj open-source mikroprocesorů Jasmine | ||
| Kilobot | vzdálenost, světlo | vibrace, 1 cm / s | 3,3 cm | 3 - 24 hodin | Harvardská Univerzita, USA | Kilobot[26] je relativně nedávná robotická platforma s novými funkcemi, jako je skupinové nabíjení a skupinové programování. Díky své jednoduchosti a nízké spotřebě energie má dlouhou dobu autonomie až 24 hodin. Roboty se nabíjejí ručně ve skupinách ve speciální nabíjecí stanici. | |||
| Kobot | vzdálenost, směr, vidění, kompas | kolo, N / A | 12 cm | 10 h | Výzkumná laboratoř KOVAN, Technická univerzita na Středním východě, Krocan | Kobot[27] je mobilní robot speciálně navržený pro robotický výzkum rojů. Má několik senzorů, které z něj činí ideální platformu pro implementaci různých robotických scénářů roje, jako je koordinovaný pohyb. Má přibližně 10 hodin doby autonomie. Má uživatelem vyměnitelnou baterii, která se nabíjí ručně. Používá se při implementaci scénáře samoorganizovaného vločkování.[28] | |||
| Mona | vzdálenost, náraz, dosah, RF | kolo, 5 cm / s | 6,5 cm | Věčný | The University of Manchester, SPOJENÉ KRÁLOVSTVÍ | Mona[31] je robot s otevřeným zdrojovým kódem, který je určen hlavně k testování navrhovaného Perpetual Robotic Swarm.[32] Byl navržen jako modulární platforma umožňující nasazení dalších modulů, které jsou připojeny k horní části platformy, jako je bezdrátová komunikace nebo vizuální deska. Nejnovější verze robota byla vyvinuta jako robotická platforma pro vzdělávací a výzkumné účely. |  Platforma robotů Mona | ||
| R-One | světlo, IR, gyroskop, náraz, akcelerometr | kolo, 30 cm / s | 10 cm | 6 h | Rice University, USA | R-jedna[34] je nízkonákladový robot pro výzkumné a výukové účely. To bylo použito v několika studiích o rojové robotice. | |||
| S-bot | světlo, IR, poloha, síla, rychlost, teplota, vlhkost, př., mic | treel | 12 cm | 2 h | École Polytechnique Fédérale de Lausanne (EPFL), Švýcarsko | S-bot[35] je jednou z nejvlivnějších a nejschopnějších rojových robotických platforem, jaké byly kdy postaveny. s-roboti mají jedinečný design chapadla schopný uchopit předměty a další s-roboty. Mají dobu autonomie přibližně 1 hodinu. | |||
| Spiderino | dosah, světlo, ložisko (s prodloužením) | šest nohou, 6 cm / s | 8 cm | 4-20 h | Univerzita v Klagenfurtu, Rakousko | Spiderino[37] je nízkonákladový výzkumný robot založený na lokomoční jednotce pavoučí hračky Hexbug. Úpravy nahrazují hlavu robota 3D-tištěným adaptérem, který se skládá ze dvou částí poskytujících prostor pro senzory, větší baterie a desky s plošnými spoji (PCB) s mikrokontrolérem Arduino, modulem Wi-Fi a ovladačem motoru. | |||
| SwarmBot | rozsah, ložisko, kamera, náraz | kolo, 50 cm / s | 12,7 cm | 3 h | Rice University, USA | SwarmBot[38] je další úspěšná platforma vyvinutá pro výzkum rojové robotiky. Má přibližně 3 hodiny doby autonomie a roboti jsou schopni najít a připojit se k nabíjecím stanicím, které jsou umístěny na stěnách. |
Reference
- ^ H. Hamann, Swarm Robotics: Formální přístup, Springer, New York, 2018.[ISBN chybí ]
- ^ Şahin, Erol. "Swarm robotics: Od zdrojů inspirace po oblasti aplikace ". Mezinárodní seminář o robotice rojů. Springer Berlin Heidelberg, 2004.[ISBN chybí ]
- ^ A b C Schmickl, Thomas a kol. "Spojte se: kooperativní rozhodování založené na srážkách mezi roboty ". Autonomní agenti a multiagentní systémy 18.1 (2009): 133–155.
- ^ A b Arvin, Farshad a kol. "Cue agregace s rojem mobilního robota: nová metoda založená na fuzzy ". Adaptivní chování (2014). doi:10.1177/1059712314528009.
- ^ Vaughan, Richard. "Masivní simulace více robotů ve fázi ". Swarm Intelligence 2.2–4 (2008): 189–208.
- ^ Pinciroli, Carlo a kol. "ARGoS: modulární vícemotorový simulátor pro heterogenní rojovou robotiku ". 2011 Mezinárodní konference IEEE / RSJ o inteligentních robotech a systémech.
- ^ Arvin, Farshad a kol. "Vývoj miniaturního robota pro robotickou aplikaci Swarm ". International Journal of Computer and Electrical Engineering 1.4 (2009): 436.
- ^ Garnier, Simon a kol. "Ztělesnění chování agregace švábů ve skupině mikro robotů ". Artificial Life 14.4 (2008): 387-408.
- ^ Özgür, Ayberk; Lemaignan, Séverin; Johal, Wafa; Beltran, Maria; Briod, Manon; Pereyre, Léa; Mondada, Francesco; Dillenbourg, Pierre (2017). "Cellulo". Sborník mezinárodní konference ACM / IEEE 2017 o interakci člověka s robotem - HRI '17. str. 119–127. doi:10.1145/2909824.3020247. ISBN 9781450343367. S2CID 2277067.
- ^ Özgür, Ayberk (2018). Cellulo: Tangible Haptic Swarm Robots for Learning (PhD). EPFL. doi:10,5075 / epfl -esis-8241.
- ^ „Levní autonomní roboti replikují chování roje“. Nový Atlas. 2014-09-22. Citováno 4. ledna 2017.
- ^ Arvin, Farshad a kol. „Colias: Autonomní mikro robot pro aplikace robotického roje.“ International Journal of Advanced Robotic Systems 11 (2014): 113.
- ^ Na, S. a kol. (2020) „Bio-inspirovaný systém umělých feromonů pro aplikace robotů v roji“, Adaptive Behavior. doi: 10,1177 / 1059712320918936.
- ^ Hu, Cheng a kol. „Bio-inspirovaný vestavěný systém vidění pro autonomní mikro roboty: případ LGMD“, IEEE Transactions on Cognitive and Developmental Systems, 2016.
- ^ A b "Kapénky". Correll Lab. 20. prosince 2012. Citováno 4. ledna 2017.
- ^ „Roboti o velikosti Ping Pong se mohou rojit společně a vytvořit inteligentní kapalinu“. Populární věda. Citováno 4. ledna 2017.
- ^ Solon, Olivia. „Roj malých robotů tvoří„ kapalinu, která myslí “(Wired UK)“. Wired UK. Archivovány od originálu dne 31. prosince 2012. Citováno 4. ledna 2017.CS1 maint: BOT: stav původní adresy URL neznámý (odkaz)
- ^ „Kapky - rojová robotika“. Citováno 4. ledna 2017.
- ^ „Kapky: nízkonákladová robotická platforma pro výuku a experimentování | Robohub“. robohub.org. Citováno 2018-05-30.
- ^ "e-puk". Citováno 7. ledna 2017.
- ^ Mondada, Francesco a kol. „Elektronický puk, robot určený pro výuku ve strojírenství.“ Sborník z 9. konference o autonomních robotických systémech a soutěžích. Sv. 1. Č. LIS-CONF-2009-004. IPCB: Instituto Politécnico de Castelo Branco, 2009.
- ^ „Swarmrobot Open-source mikro-robotický projekt“. www.swarmrobot.org. Citováno 7. ledna 2017.
- ^ Kernbach, Serge a kol. „Znovu ztělesnění chování agregace včel v umělém mikro-robotickém systému.“ Adaptivní chování 17,3 (2009): 237-259.
- ^ "acornejo / kilobot-labs". GitHub. Citováno 7. ledna 2017.
- ^ „Samoorganizující se skupina pro výzkum systémů“. www.eecs.harvard.edu. Archivovány od originál dne 26. října 2014. Citováno 7. ledna 2017.
- ^ Rubenstein, Michael a kol. „Kilobot: Levný robot se škálovatelnými operacemi navržený pro kolektivní chování.“ Robotics and Autonomous Systems 62.7 (2014): 966-975.
- ^ Turgut, Ali E. a kol. „Kobot: mobilní robot navržený speciálně pro výzkum rojové robotiky.“ Middle East Technical University, Ankara, Turkey, METUCENG-TR Tech. Rep 5 (2007)
- ^ Turgut, Ali E. a kol. „Samoorganizované hejno v rojích mobilních robotů.“ Swarm Intelligence 2.2-4 (2008): 97-120.
- ^ „Mona Robot“. Citováno 8. března 2017.
- ^ „Základní funkce a testovací kód robota Mona v Arduinu: MonaRobot / Mona-Platform“. 2019-08-31.
- ^ F.Arvin, J. Espinosa, B. Bird, A. West, S. Watson, B. Lennox Arvin, Farshad; Espinosa, Jose; Bird, Benjamin; West, Andrew; Watson, Simon; Lennox, Barry (2018). „Mona: cenově dostupný otevřený mobilní robot pro vzdělávání a výzkum“. Journal of Intelligent & Robotic Systems. 94 (3–4): 761–775. doi:10.1007 / s10846-018-0866-9. S2CID 116022614., Journal of Intelligent & Robotic Systems, 2018
- ^ F.Arvin, S.Watson, AETurgut, J. Espinosa, T.Krajník, B.Lennox „Perpetual Robot Swarm: Long-Term Autonomy of Mobile Robots using On-the-fly Inductive Charging“, Journal of Intelligent & Robotic Systems , 2017
- ^ „Laboratoř pro více robotů - Rice University, Houston TX“. mrsl.rice.edu. Citováno 4. ledna 2017.
- ^ McLurkin, James a kol. „Levný multi-robotický systém pro výzkum, výuku a dosah.“ Distribuované autonomní robotické systémy. Springer Berlin Heidelberg, 2013. 597-609.
- ^ Mondada, Francesco a kol. „SWARM-BOT: Nový distribuovaný robotický koncept.“ Autonomous robots 17.2-3 (2004): 193-221.
- ^ "Spiderino". Citováno 27. července 2020.
- ^ Jdeed, Midhat a kol. "Spiderino - nízkonákladový robot pro výzkum rojů a vzdělávací účely ". Na 13. workshopu o inteligentních řešeních ve vestavěných systémech (WISES 2017), strany 35–39, červenec 2017.
- ^ McLurkin, James a kol. "Speaking Swarmish: Návrh rozhraní člověk-robot pro velké roje autonomních mobilních robotů Jarní sympozium AAAI: Odvážně jít tam, kam dosud žádný tým člověk-robot nepřišel. 2006.

