Robotické paradigma - Robotic paradigm
Tento článek má několik problémů. Prosím pomozte vylepši to nebo diskutovat o těchto problémech na internetu diskusní stránka. (Zjistěte, jak a kdy tyto zprávy ze šablony odebrat) (Zjistěte, jak a kdy odstranit tuto zprávu šablony)
|
v robotika, a robotické paradigma je mentálním modelem fungování robota. Robotické paradigma lze popsat vztahem mezi třemi základními prvky robotika: Snímání, plánování a jednání. Lze jej také popsat tím, jak jsou smyslová data zpracovávána a distribuována v systému a kde se rozhoduje.
Hierarchické / deliberativní paradigma
- Robot pracuje způsobem shora dolů a je velmi náročný na plánování.
- Robot snímá svět, plánuje další akci, jedná; v každém kroku robot výslovně plánuje další pohyb.
- Všechna data ze snímání mají tendenci být shromažďována do jednoho globálního modelu světa.
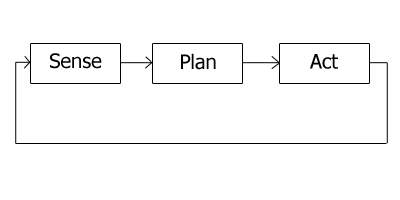
Schéma hierarchického paradigmatu
Reaktivní paradigma
- Sense-act typ organizace.
- Robot má několik instancí propojení Sense-Act.
- Tato propojení jsou souběžné procesy, které se nazývají chování a které berou data lokálního snímání a vypočítávají nejlepší akci, která se provádí nezávisle na tom, co ostatní procesy dělají.
- Robot provede kombinaci chování.

Schéma reaktivního paradigmatu
Hybridní záměrné / reaktivní paradigma
- Robot nejprve plánuje (uvažuje), jak nejlépe rozložit úkol na dílčí úkoly (nazývané také „plánování misí“) a poté, jaké je vhodné chování k provedení každého dílčího úkolu.
- Pak se chování začne provádět podle reaktivního paradigmatu.
- Organizace snímání je také směsicí hierarchických a reaktivních stylů; data senzoru jsou směrována na každé chování, které tento senzor potřebuje, ale jsou k dispozici také plánovači pro konstrukci globálního modelu světa zaměřeného na úkoly.

Schéma hybridního úmyslného / reaktivního paradigmatu
