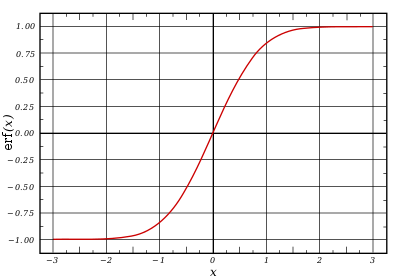
Graf chybové funkce
V matematice je chybová funkce (nazývané také Gaussova chybová funkce ), často označován erf , je komplexní funkce komplexní proměnné definované jako:[1]
erf z = 2 π ∫ 0 z E − t 2 d t . { displaystyle operatorname {erf} z = { frac {2} { sqrt { pi}}} int _ {0} ^ {z} e ^ {- t ^ {2}} , dt.} Tento integrál je a speciální (ne-základní ) a sigmoid funkce, která se často vyskytuje v pravděpodobnost , statistika , a parciální diferenciální rovnice . V mnoha z těchto aplikací je argument funkce skutečné číslo. Pokud je argument funkce skutečný, pak je hodnota funkce také reálná.
Ve statistice pro nezáporné hodnoty X , má chybová funkce následující interpretaci: pro a náhodná proměnná Y to je normálně distribuováno s znamenat 0 a rozptyl 1/2, erf X je pravděpodobnost, že Y spadá do rozsahu [−X , X ] .
Dvě úzce související funkce jsou doplňková chybová funkce (erfc ) definováno jako
erfc z = 1 − erf z , { displaystyle operatorname {erfc} z = 1- operatorname {erf} z,} a funkce imaginární chyby (erfi ) definováno jako
erfi z = − i erf ( i z ) , { displaystyle operatorname {erfi} z = -i operatorname {erf} (iz),} kde i je imaginární jednotka .
název Název „chybová funkce“ a jeho zkratka erf byly navrženy J. W. L. Glaisher v roce 1871 z důvodu jeho souvislosti s "teorií pravděpodobnosti, a zejména teorií Chyby ."[2] [3] hustota darováno
F ( X ) = ( C π ) 1 2 E − C X 2 { displaystyle f (x) = left ({ frac {c} { pi}} right) ^ { tfrac {1} {2}} e ^ {- cx ^ {2}}} (dále jen normální distribuce ), Glaisher vypočítá pravděpodobnost chyby mezi nimi str { displaystyle p} q { displaystyle q}
( C π ) 1 2 ∫ str q E − C X 2 d X = 1 2 ( erf ( q C ) − erf ( str C ) ) . { displaystyle left ({ frac {c} { pi}} right) ^ { tfrac {1} {2}} int _ {p} ^ {q} e ^ {- cx ^ {2} } dx = { tfrac {1} {2}} left ( operatorname {erf} (q { sqrt {c}}) - operatorname {erf} (p { sqrt {c}}) right) .} Aplikace Když jsou výsledky řady měření popsány a normální distribuce s standardní odchylka σ { displaystyle sigma} očekávaná hodnota 0, tedy erf ( A σ 2 ) { displaystyle textstyle operatorname {erf} vlevo ({ frac {a} { sigma { sqrt {2}}}} vpravo)} A a +A , pro pozitivní A . To je užitečné například při určování bitová chybovost digitálního komunikačního systému.
Chybové a doplňkové chybové funkce se vyskytují například v řešeních rovnice tepla když okrajové podmínky jsou dány Funkce Heaviside step .
Chybovou funkci a její aproximace lze použít k odhadu platných výsledků s vysokou pravděpodobností nebo s nízkou pravděpodobností. Daná náhodná proměnná X ∼ Norma [ μ , σ ] { displaystyle X sim operatorname {Norm} [ mu, sigma]} L < μ { displaystyle L < mu}
Pr [ X ≤ L ] = 1 2 + 1 2 erf ( L − μ 2 σ ) ≈ A exp ( − B ( L − μ σ ) 2 ) { displaystyle Pr [X leq L] = { frac {1} {2}} + { frac {1} {2}} operatorname {erf} left ({ frac {L- mu} {{ sqrt {2}} sigma}} right) přibližně A exp left (-B left ({ frac {L- mu} { sigma}} right) ^ {2} že jo)} kde A a B jsou určité číselné konstanty. Li L je dostatečně daleko od průměru, tj. μ − L ≥ σ ln k { displaystyle mu -L geq sigma { sqrt { ln {k}}}}
Pr [ X ≤ L ] ≤ A exp ( − B ln k ) = A k B { displaystyle Pr [X leq L] leq A exp (-B ln {k}) = { frac {A} {k ^ {B}}}} takže pravděpodobnost jde na 0 jako k → ∞ { displaystyle k to infty}
Vlastnosti Vlastnictví erf ( − z ) = − erf ( z ) { displaystyle operatorname {erf} (-z) = - operatorname {erf} (z)} lichá funkce . To přímo vyplývá ze skutečnosti, že integrand E − t 2 { displaystyle e ^ {- t ^ {2}}} sudá funkce .
Pro všechny komplexní číslo z :
erf ( z ¯ ) = erf ( z ) ¯ { displaystyle operatorname {erf} ({ overline {z}}) = { overline { operatorname {erf} (z)}}} kde z ¯ { displaystyle { overline {z}}} komplexní konjugát z z .
Integrrand F = exp (-z 2 ) a F = erf (z ) jsou zobrazeny v komplexu z -rovina na obrázcích 2 a 3. Úroveň Im (F ) = 0 je zobrazeno silnou zelenou čarou. Záporné celočíselné hodnoty Im (F ) jsou zobrazeny silnými červenými čarami. Kladné celočíselné hodnoty Im (F ) jsou zobrazeny silnými modrými čarami. Mezilehlé úrovně Im (F ) = konstanta jsou zobrazeny tenkými zelenými čarami. Střední úrovně Re (F ) = konstanty jsou zobrazeny tenkými červenými čarami pro záporné hodnoty a tenkými modrými čarami pro kladné hodnoty.
Chybová funkce při + ∞ je přesně 1 (viz Gaussův integrál ). Na skutečné ose, erf (z ) přibližuje jednotu v z → + ∞ a −1 na z → −∞. Na imaginární ose má sklon ±i ∞.
Taylor série Chybová funkce je celá funkce ; nemá žádné singularity (kromě toho v nekonečnu) a jeho Taylorova expanze vždy konverguje, ale je známá jako „[...] pro svou špatnou konvergenci, pokud x> 1.“[4]
Definující integrál nelze vyhodnotit v uzavřená forma ve smyslu základní funkce , ale rozšířením integrand E −z 2 do jeho Řada Maclaurin a integrací po termínu získáme řadu Maclaurinových funkcí chybové funkce jako:
erf ( z ) = 2 π ∑ n = 0 ∞ ( − 1 ) n z 2 n + 1 n ! ( 2 n + 1 ) = 2 π ( z − z 3 3 + z 5 10 − z 7 42 + z 9 216 − ⋯ ) { displaystyle operatorname {erf} (z) = { frac {2} { sqrt { pi}}} sum _ {n = 0} ^ { infty} { frac {(-1) ^ { n} z ^ {2n + 1}} {n! (2n + 1)}} = { frac {2} { sqrt { pi}}} left (z - { frac {z ^ {3} } {3}} + { frac {z ^ {5}} {10}} - { frac {z ^ {7}} {42}} + { frac {z ^ {9}} {216}} - cdots right)} který platí pro každého komplexní číslo z . Pojmy jmenovatele jsou sekvence A007680 v OEIS .
Pro iterativní výpočet výše uvedené řady může být užitečná následující alternativní formulace:
erf ( z ) = 2 π ∑ n = 0 ∞ ( z ∏ k = 1 n − ( 2 k − 1 ) z 2 k ( 2 k + 1 ) ) = 2 π ∑ n = 0 ∞ z 2 n + 1 ∏ k = 1 n − z 2 k { displaystyle operatorname {erf} (z) = { frac {2} { sqrt { pi}}} sum _ {n = 0} ^ { infty} left (z prod _ {k = 1} ^ {n} { frac {- (2k-1) z ^ {2}} {k (2k + 1)}} right) = { frac {2} { sqrt { pi}}} sum _ {n = 0} ^ { infty} { frac {z} {2n + 1}} prod _ {k = 1} ^ {n} { frac {-z ^ {2}} {k }}} protože − ( 2 k − 1 ) z 2 k ( 2 k + 1 ) { displaystyle { frac {- (2k-1) z ^ {2}} {k (2k + 1)}}} k th termín do (k + 1)Svatý termín (s ohledem na z jako první termín).
Funkce imaginární chyby má velmi podobnou řadu Maclaurinů, která je:
erfi ( z ) = 2 π ∑ n = 0 ∞ z 2 n + 1 n ! ( 2 n + 1 ) = 2 π ( z + z 3 3 + z 5 10 + z 7 42 + z 9 216 + ⋯ ) { displaystyle operatorname {erfi} (z) = { frac {2} { sqrt { pi}}} sum _ {n = 0} ^ { infty} { frac {z ^ {2n + 1 }} {n! (2n + 1)}} = { frac {2} { sqrt { pi}}} left (z + { frac {z ^ {3}} {3}} + { frac {z ^ {5}} {10}} + { frac {z ^ {7}} {42}} + { frac {z ^ {9}} {216}} + cdots right)} který platí pro každého komplexní číslo z .
Derivace a integrál Derivace chybové funkce vyplývá okamžitě z její definice:
d d z erf ( z ) = 2 π E − z 2 . { displaystyle { frac {d} {dz}} operatorname {erf} (z) = { frac {2} { sqrt { pi}}} e ^ {- z ^ {2}}.} Z toho je derivace funkce imaginární chyby také okamžitá:
d d z erfi ( z ) = 2 π E z 2 . { displaystyle { frac {d} {dz}} operatorname {erfi} (z) = { frac {2} { sqrt { pi}}} e ^ {z ^ {2}}.} An primitivní chybové funkce, kterou lze získat integrace po částech , je
z erf ( z ) + E − z 2 π . { displaystyle z operatorname {erf} (z) + { frac {e ^ {- z ^ {2}}} { sqrt { pi}}}.} Antiderivát funkce imaginární chyby, který lze také získat integrací po částech, je
z erfi ( z ) − E z 2 π . { displaystyle z operatorname {erfi} (z) - { frac {e ^ {z ^ {2}}} { sqrt { pi}}}.} Deriváty vyšších řádů jsou dány vztahem
erf ( k ) ( z ) = 2 ( − 1 ) k − 1 π H k − 1 ( z ) E − z 2 = 2 π d k − 1 d z k − 1 ( E − z 2 ) , k = 1 , 2 , … { displaystyle operatorname {erf} ^ {(k)} (z) = { frac {2 (-1) ^ {k-1}} { sqrt { pi}}} { mathit {H}} _ {k-1} (z) e ^ {- z ^ {2}} = { frac {2} { sqrt { pi}}} { frac {d ^ {k-1}} {dz ^ {k-1}}} vlevo (e ^ {- z ^ {2}} vpravo), qquad k = 1,2, tečky} kde H { displaystyle { mathit {H}}} Hermitovy polynomy .[5]
Řada Bürmann Expanze,[6] X { displaystyle x} Hans Heinrich Bürmann věta:[7]
erf ( X ) = 2 π sgn ( X ) 1 − E − X 2 ( 1 − 1 12 ( 1 − E − X 2 ) − 7 480 ( 1 − E − X 2 ) 2 − 5 896 ( 1 − E − X 2 ) 3 − 787 276480 ( 1 − E − X 2 ) 4 − ⋯ ) = 2 π sgn ( X ) 1 − E − X 2 ( π 2 + ∑ k = 1 ∞ C k E − k X 2 ) . { displaystyle { begin {aligned} operatorname {erf} (x) & = { frac {2} { sqrt { pi}}} operatorname {sgn} (x) { sqrt {1-e ^ {-x ^ {2}}}} left (1 - { frac {1} {12}} left (1-e ^ {- x ^ {2}} right) - { frac {7} {480}} left (1-e ^ {- x ^ {2}} right) ^ {2} - { frac {5} {896}} left (1-e ^ {- x ^ {2 }} right) ^ {3} - { frac {787} {276480}} left (1-e ^ {- x ^ {2}} right) ^ {4} - cdots right) [10pt] & = { frac {2} { sqrt { pi}}} operatorname {sgn} (x) { sqrt {1-e ^ {- x ^ {2}}}}} vlevo ({ frac { sqrt { pi}} {2}} + sum _ {k = 1} ^ { infty} c_ {k} e ^ {- kx ^ {2}} right). end {zarovnáno }}} Ponecháním pouze prvních dvou koeficientů a výběrem C 1 = 31 200 { displaystyle c_ {1} = { frac {31} {200}}} C 2 = − 341 8000 , { displaystyle c_ {2} = - { frac {341} {8000}},} X = ± 1.3796 , { displaystyle x = pm 1,3796,} 3.6127 ⋅ 10 − 3 { displaystyle 3.6127 cdot 10 ^ {- 3}}
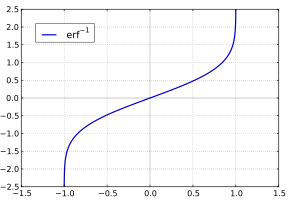
erf ( X ) ≈ 2 π sgn ( X ) 1 − E − X 2 ( π 2 + 31 200 E − X 2 − 341 8000 E − 2 X 2 ) . { displaystyle operatorname {erf} (x) přibližně { frac {2} { sqrt { pi}}} operatorname {sgn} (x) { sqrt {1-e ^ {- x ^ {2 }}}} left ({ frac { sqrt { pi}} {2}} + { frac {31} {200}} e ^ {- x ^ {2}} - { frac {341} {8000}} e ^ {- 2x ^ {2}} vpravo).} Inverzní funkce Funkce inverzní chyby
Vzhledem ke složitému číslu z , tam není unikátní komplexní číslo w uspokojující erf ( w ) = z { displaystyle operatorname {erf} (w) = z} −1 < X < 1 existuje jedinečný nemovitý označené číslo erf − 1 ( X ) { displaystyle operatorname {erf} ^ {- 1} (x)}
erf ( erf − 1 ( X ) ) = X . { displaystyle operatorname {erf} left ( operatorname {erf} ^ {- 1} (x) right) = x.} The funkce inverzní chyby je obvykle definován s doménou (−1,1) a je omezen na tuto doménu v mnoha systémech počítačové algebry. Lze jej však rozšířit na disk |z | < 1 komplexní roviny pomocí řady Maclaurinů
erf − 1 ( z ) = ∑ k = 0 ∞ C k 2 k + 1 ( π 2 z ) 2 k + 1 , { displaystyle operatorname {erf} ^ {- 1} (z) = součet _ {k = 0} ^ { infty} { frac {c_ {k}} {2k + 1}} vlevo ({ frac { sqrt { pi}} {2}} z vpravo) ^ {2k + 1},} kde C 0 = 1 a
C k = ∑ m = 0 k − 1 C m C k − 1 − m ( m + 1 ) ( 2 m + 1 ) = { 1 , 1 , 7 6 , 127 90 , 4369 2520 , 34807 16200 , … } . { displaystyle c_ {k} = součet _ {m = 0} ^ {k-1} { frac {c_ {m} c_ {k-1-m}} {(m + 1) (2m + 1) }} = left {1,1, { frac {7} {6}}, { frac {127} {90}}, { frac {4369} {2520}}, { frac {34807} {16200}}, ldots right }.} Takže máme rozšíření řady (běžné faktory byly zrušeny od čitatelů a jmenovatelů):
erf − 1 ( z ) = 1 2 π ( z + π 12 z 3 + 7 π 2 480 z 5 + 127 π 3 40320 z 7 + 4369 π 4 5806080 z 9 + 34807 π 5 182476800 z 11 + ⋯ ) . { displaystyle operatorname {erf} ^ {- 1} (z) = { tfrac {1} {2}} { sqrt { pi}} vlevo (z + { frac { pi} {12}} z ^ {3} + { frac {7 pi ^ {2}} {480}} z ^ {5} + { frac {127 pi ^ {3}} {40320}} z ^ {7} + { frac {4369 pi ^ {4}} {5806080}} z ^ {9} + { frac {34807 pi ^ {5}} {182476800}} z ^ {11} + cdots right). } (Po zrušení jsou čitatelem / jmenovatelem zlomky položky OEIS : A092676 OEIS : A092677 OEIS ; bez zrušení jsou čitatelské podmínky uvedeny v záznamu OEIS : A002067
Pro |z | < 1 , my máme erf ( erf − 1 ( z ) ) = z { displaystyle operatorname {erf} left ( operatorname {erf} ^ {- 1} (z) right) = z}
The inverzní doplňková chybová funkce je definován jako
erfc − 1 ( 1 − z ) = erf − 1 ( z ) . { displaystyle operatorname {erfc} ^ {- 1} (1-z) = operatorname {erf} ^ {- 1} (z).} Pro nemovitý X existuje jedinečný nemovitý číslo erfi − 1 ( X ) { displaystyle operatorname {erfi} ^ {- 1} (x)} erfi ( erfi − 1 ( X ) ) = X { displaystyle operatorname {erfi} left ( operatorname {erfi} ^ {- 1} (x) right) = x} inverzní imaginární chybová funkce je definován jako erfi − 1 ( X ) { displaystyle operatorname {erfi} ^ {- 1} (x)} [8]
Pro všechny skutečné X , Newtonova metoda lze použít k výpočtu erfi − 1 ( X ) { displaystyle operatorname {erfi} ^ {- 1} (x)} − 1 ≤ X ≤ 1 { displaystyle -1 leq x leq 1}
erfi − 1 ( z ) = ∑ k = 0 ∞ ( − 1 ) k C k 2 k + 1 ( π 2 z ) 2 k + 1 , { displaystyle operatorname {erfi} ^ {- 1} (z) = součet _ {k = 0} ^ { infty} { frac {(-1) ^ {k} c_ {k}} {2k + 1}} left ({ frac { sqrt { pi}} {2}} z right) ^ {2k + 1},} kde C k
Asymptotická expanze Užitečné asymptotická expanze doplňkové chybové funkce (a tedy i chybové funkce) pro velké reálné X je
erfc ( X ) = E − X 2 X π [ 1 + ∑ n = 1 ∞ ( − 1 ) n 1 ⋅ 3 ⋅ 5 ⋯ ( 2 n − 1 ) ( 2 X 2 ) n ] = E − X 2 X π ∑ n = 0 ∞ ( − 1 ) n ( 2 n − 1 ) ! ! ( 2 X 2 ) n , { displaystyle operatorname {erfc} (x) = { frac {e ^ {- x ^ {2}}} {x { sqrt { pi}}}} vlevo [1+ součet _ {n = 1} ^ { infty} (- 1) ^ {n} { frac {1 cdot 3 cdot 5 cdots (2n-1)} {(2x ^ {2}) ^ {n}}} vpravo ] = { frac {e ^ {- x ^ {2}}} {x { sqrt { pi}}}} sum _ {n = 0} ^ { infty} (- 1) ^ {n} { frac {(2n-1) !!} {(2x ^ {2}) ^ {n}}},} kde (2n - 1) !! je dvojitý faktoriál z (2n - 1), což je součin všech lichých čísel až do (2n - 1). Tato řada se rozchází pro každou konečnou X , a jeho význam jako asymptotická expanze je, že pro všechny N ∈ N { displaystyle N in mathbb {N}}
erfc ( X ) = E − X 2 X π ∑ n = 0 N − 1 ( − 1 ) n ( 2 n − 1 ) ! ! ( 2 X 2 ) n + R N ( X ) { displaystyle operatorname {erfc} (x) = { frac {e ^ {- x ^ {2}}} {x { sqrt { pi}}}} sum _ {n = 0} ^ {N -1} (- 1) ^ {n} { frac {(2n-1) !!} {(2x ^ {2}) ^ {n}}} + R_ {N} (x)} kde zbytek, v Landauova notace , je
R N ( X ) = Ó ( X 1 − 2 N E − X 2 ) { displaystyle R_ {N} (x) = O left (x ^ {1-2N} e ^ {- x ^ {2}} right)} tak jako X → ∞ . { displaystyle x to infty.}
Přesná hodnota zbytku je ve skutečnosti
R N ( X ) := ( − 1 ) N π 2 1 − 2 N ( 2 N ) ! N ! ∫ X ∞ t − 2 N E − t 2 d t , { displaystyle R_ {N} (x): = { frac {(-1) ^ {N}} { sqrt { pi}}} 2 ^ {1-2N} { frac {(2N)!} {N!}} Int _ {x} ^ { infty} t ^ {- 2N} e ^ {- t ^ {2}} , dt,} který snadno následuje indukcí, zápisem
E − t 2 = − ( 2 t ) − 1 ( E − t 2 ) ′ { displaystyle e ^ {- t ^ {2}} = - (2t) ^ {- 1} vlevo (e ^ {- t ^ {2}} vpravo) '} a integraci po částech.
Pro dostatečně velké hodnoty x stačí pouze několik prvních členů této asymptotické expanze, abychom získali dobrou aproximaci erfc (X ) (zatímco pro ne příliš velké hodnoty X , výše uvedená Taylorova expanze na 0 poskytuje velmi rychlou konvergenci).
Pokračující rozšiřování frakcí A pokračující zlomek rozšíření doplňkové chybové funkce je:[9]
erfc ( z ) = z π E − z 2 1 z 2 + A 1 1 + A 2 z 2 + A 3 1 + ⋯ A m = m 2 . { displaystyle operatorname {erfc} (z) = { frac {z} { sqrt { pi}}} e ^ {- z ^ {2}} { cfrac {1} {z ^ {2} + { cfrac {a_ {1}} {1 + { cfrac {a_ {2}} {z ^ {2} + { cfrac {a_ {3}} {1+ dotsb}}}}}}}} qquad a_ {m} = { frac {m} {2}}.} Integrace chybové funkce s funkcí Gaussovské hustoty ∫ − ∞ ∞ erf ( A X + b ) 1 2 π σ 2 E − ( X − μ ) 2 2 σ 2 d X = erf [ A μ + b 1 + 2 A 2 σ 2 ] , A , b , μ , σ ∈ R { displaystyle int _ {- infty} ^ { infty} operatorname {erf} left (ax + b right) { frac {1} { sqrt {2 pi sigma ^ {2}} }} e ^ {- { frac {(x- mu) ^ {2}} {2 sigma ^ {2}}}} , dx = operatorname {erf} left [{ frac {a mu + b} { sqrt {1 + 2a ^ {2} sigma ^ {2}}}} right], qquad a, b, mu, sigma in mathbb {R}} Faktoriální řada erfc z = E − z 2 π z ∑ n = 0 ∞ ( − 1 ) n Q n ( z 2 + 1 ) n ¯ = E − z 2 π z ( 1 − 1 2 1 ( z 2 + 1 ) + 1 4 1 ( z 2 + 1 ) ( z 2 + 2 ) − ⋯ ) { displaystyle { begin {aligned} operatorname {erfc} z & = { frac {e ^ {- z ^ {2}}} {{ sqrt { pi}} , z}} součet _ {n = 0} ^ { infty} { frac {(-1) ^ {n} Q_ {n}} {{(z ^ {2} +1)} ^ { bar {n}}}} & = { frac {e ^ {- z ^ {2}}} {{ sqrt { pi}} , z}} left (1 - { frac {1} {2}} { frac {1 } {(z ^ {2} +1)}} + { frac {1} {4}} { frac {1} {(z ^ {2} +1) (z ^ {2} +2)} } - cdots right) end {zarovnáno}}} konverguje pro Re ( z 2 ) > 0. { displaystyle operatorname {Re} (z ^ {2})> 0.} Q n = def 1 Γ ( 1 / 2 ) ∫ 0 ∞ τ ( τ − 1 ) ⋯ ( τ − n + 1 ) τ − 1 / 2 E − τ d τ = ∑ k = 0 n ( 1 2 ) k ¯ s ( n , k ) , { displaystyle Q_ {n} { stackrel { text {def}} {=}} { frac {1} { Gamma (1/2)}} int _ {0} ^ { infty} tau ( tau -1) cdots ( tau -n + 1) tau ^ {- 1/2} e ^ {- tau} d tau = součet _ {k = 0} ^ {n} vlevo ({ frac {1} {2}} vpravo) ^ { bar {k}} s (n, k),} z n ¯ { displaystyle z ^ { bar {n}}} rostoucí faktoriál , a s ( n , k ) { displaystyle s (n, k)} Stirlingovo číslo prvního druhu .[10] [11] erf ( z ) = 2 π ∑ n = 0 ∞ ( − 2 ) n ( 2 n − 1 ) ! ! ( 2 n + 1 ) ! z 2 n + 1 { displaystyle operatorname {erf} (z) = { frac {2} { sqrt { pi}}} sum _ {n = 0} ^ { infty} { frac {(-2) ^ { n} (2n-1) !!} {(2n + 1)!}} z ^ {2n + 1}} Numerické aproximace Aproximace se základními funkcemi Abramowitz a Stegun dejte několik aproximací s různou přesností (rovnice 7.1.25–28). To umožňuje zvolit nejrychlejší aproximaci vhodnou pro danou aplikaci. Aby se zvýšila přesnost, jsou to: erf ( X ) ≈ 1 − 1 ( 1 + A 1 X + A 2 X 2 + A 3 X 3 + A 4 X 4 ) 4 , X ≥ 0 { displaystyle operatorname {erf} (x) přibližně 1 - { frac {1} {(1 + a_ {1} x + a_ {2} x ^ {2} + a_ {3} x ^ {3} + a_ {4} x ^ {4}) ^ {4}}}, qquad x geq 0} (maximální chyba: 5 × 10−4 ) kde A 1 = 0.278393, A 2 = 0.230389, A 3 = 0.000972, A 4 = 0.078108 erf ( X ) ≈ 1 − ( A 1 t + A 2 t 2 + A 3 t 3 ) E − X 2 , t = 1 1 + str X , X ≥ 0 { displaystyle operatorname {erf} (x) přibližně 1- (a_ {1} t + a_ {2} t ^ {2} + a_ {3} t ^ {3}) e ^ {- x ^ {2 }}, quad t = { frac {1} {1 + px}}, qquad x geq 0} −5 )kde str = 0.47047, A 1 = 0.3480242, A 2 = −0.0958798, A 3 = 0.7478556 erf ( X ) ≈ 1 − 1 ( 1 + A 1 X + A 2 X 2 + ⋯ + A 6 X 6 ) 16 , X ≥ 0 { displaystyle operatorname {erf} (x) přibližně 1 - { frac {1} {(1 + a_ {1} x + a_ {2} x ^ {2} + cdots + a_ {6} x ^ {6}) ^ {16}}}, qquad x geq 0} −7 )kde A 1 = 0.0705230784, A 2 = 0.0422820123, A 3 = 0.0092705272, A 4 = 0.0001520143, A 5 = 0.0002765672, A 6 = 0.0000430638 erf ( X ) ≈ 1 − ( A 1 t + A 2 t 2 + ⋯ + A 5 t 5 ) E − X 2 , t = 1 1 + str X { displaystyle operatorname {erf} (x) přibližně 1- (a_ {1} t + a_ {2} t ^ {2} + cdots + a_ {5} t ^ {5}) e ^ {- x ^ {2}}, quad t = { frac {1} {1 + px}}} −7 )kde str = 0.3275911, A 1 = 0.254829592, A 2 = −0.284496736, A 3 = 1.421413741, A 4 = −1.453152027, A 5 = 1.061405429 Všechny tyto přibližné hodnoty platí pro X ≥ 0. Chcete-li použít tyto aproximace pro záporné hodnoty X , použijte skutečnost, že erf (x) je zvláštní funkce, takže erf (X ) = −erf (-X ). Exponenciální hranice a čistá exponenciální aproximace pro funkci doplňkové chyby jsou dány vztahem [12] erfc ( X ) ≤ 1 2 E − 2 X 2 + 1 2 E − X 2 ≤ E − X 2 , X > 0 erfc ( X ) ≈ 1 6 E − X 2 + 1 2 E − 4 3 X 2 , X > 0. { displaystyle { begin {aligned} operatorname {erfc} (x) & leq { frac {1} {2}} e ^ {- 2x ^ {2}} + { frac {1} {2} } e ^ {- x ^ {2}} leq e ^ {- x ^ {2}}, qquad x> 0 operatorname {erfc} (x) & přibližně { frac {1} {6 }} e ^ {- x ^ {2}} + { frac {1} {2}} e ^ {- { frac {4} {3}} x ^ {2}}, qquad x> 0. end {zarovnáno}}} Výše uvedené byly zobecněny na částky N { displaystyle N} [13] N { displaystyle N} erfc ( X ) { displaystyle operatorname {erfc} (x)} 2 Q ~ ( 2 X ) { displaystyle 2 { tilde {Q}} ({ sqrt {2}} x)} Q ~ ( X ) = ∑ n = 1 N A n E − b n X 2 . { displaystyle { tilde {Q}} (x) = součet _ {n = 1} ^ {N} a_ {n} e ^ {- b_ {n} x ^ {2}}.} Zejména existuje systematická metodika řešení numerických koeficientů { ( A n , b n ) } n = 1 N { displaystyle {(a_ {n}, b_ {n}) } _ {n = 1} ^ {N}} minimax aproximace nebo vázaná na úzce související Q-funkce : Q ( X ) ≈ Q ~ ( X ) { displaystyle Q (x) přibližně { tilde {Q}} (x)} Q ( X ) ≤ Q ~ ( X ) { displaystyle Q (x) leq { tilde {Q}} (x)} Q ( X ) ≥ Q ~ ( X ) { displaystyle Q (x) geq { tilde {Q}} (x)} X ≥ 0 { displaystyle x geq 0} { ( A n , b n ) } n = 1 N { displaystyle {(a_ {n}, b_ {n}) } _ {n = 1} ^ {N}} N = 25 { displaystyle N = 25} [14] Těsné přiblížení doplňkové chybové funkce pro X ∈ [ 0 , ∞ ) { displaystyle x v [0, infty)} [15] { A , B } { displaystyle {A, B }} erfc ( X ) ≈ ( 1 − E − A X ) E − X 2 B π X . { displaystyle operatorname {erfc} left (x right) přibližně { frac { left (1-e ^ {- Axe} right) e ^ {- x ^ {2}}} {B { sqrt { pi}} x}}.} Rozhodli { A , B } = { 1.98 , 1.135 } , { displaystyle {A, B } = {1.98,1.135 },} X ≥ 0. { displaystyle x geq 0.} Jednorázová dolní mez je[16] erfc ( X ) ≥ 2 E π β − 1 β E − β X 2 , X ≥ 0 , β > 1 , { displaystyle operatorname {erfc} (x) geq { sqrt { frac {2e} { pi}}} { frac { sqrt { beta -1}} { beta}} e ^ {- beta x ^ {2}}, qquad x geq 0, beta> 1,} kde parametr β lze vybrat, aby se minimalizovala chyba v požadovaném intervalu aproximace. Další aproximaci uvádí Sergei Winitzki pomocí svých „globálních aproximací Padé“:[17] [18] :2–3 erf ( X ) ≈ sgn ( X ) 1 − exp ( − X 2 4 π + A X 2 1 + A X 2 ) { displaystyle operatorname {erf} (x) přibližně operatorname {sgn} (x) { sqrt {1- exp left (-x ^ {2} { frac {{ frac {4} { pi}} + sekera ^ {2}} {1 + sekera ^ {2}}} doprava)}}} kde A = 8 ( π − 3 ) 3 π ( 4 − π ) ≈ 0.140012. { displaystyle a = { frac {8 ( pi -3)} {3 pi (4- pi)}} přibližně 0,14 40012.} Toto je navrženo tak, aby bylo velmi přesné v sousedství 0 a sousedství nekonečna a relativní chyba je menší než 0,00035 pro všechny skutečné X . Pomocí alternativní hodnoty A ≈ 0,147 snižuje maximální relativní chybu na přibližně 0,00013.[19] Tuto aproximaci lze převrátit, abychom získali aproximaci funkce inverzní chyby: erf − 1 ( X ) ≈ sgn ( X ) ( 2 π A + ln ( 1 − X 2 ) 2 ) 2 − ln ( 1 − X 2 ) A − ( 2 π A + ln ( 1 − X 2 ) 2 ) . { displaystyle operatorname {erf} ^ {- 1} (x) přibližně operatorname {sgn} (x) { sqrt {{ sqrt { vlevo ({ frac {2} { pi a}} + { frac { ln (1-x ^ {2})} {2}} vpravo) ^ {2} - { frac { ln (1-x ^ {2})} {a}}}} - left ({ frac {2} { pi a}} + { frac { ln (1-x ^ {2})} {2}} right)}}} Polynomiální Aproximace s maximální chybou 1.2 × 10 − 7 { displaystyle 1,2 krát 10 ^ {- 7}} [20]
erf ( X ) = { 1 − τ X ≥ 0 τ − 1 X < 0 { displaystyle operatorname {erf} (x) = { začátek {případů} 1- tau & x geq 0 tau -1 & x <0 end {případů}}} s
τ = t ⋅ exp ( − X 2 − 1.26551223 + 1.00002368 t + 0.37409196 t 2 + 0.09678418 t 3 − 0.18628806 t 4 + 0.27886807 t 5 − 1.13520398 t 6 + 1.48851587 t 7 − 0.82215223 t 8 + 0.17087277 t 9 ) { displaystyle { begin {zarovnáno} tau & = t cdot exp left (-x ^ {2} -1,2651223 + 1,00002368t + 0,37409196t ^ {2} + 0,09678418t ^ {3} -0,18628806t ^ {4} right. & left. Qquad qquad qquad + 0,27886807t ^ {5} -1,13520398t ^ {6} + 1,48851587t ^ {7} -0,82215223t ^ {8} + 0,17087277t ^ {9} right) end {aligned}}} a
t = 1 1 + 0.5 | X | . { displaystyle t = { frac {1} {1 + 0,5 | x |}}.} Tabulka hodnot X erf (x) 1-erf (x) 0 0.02 564 575 435 425 0.04 111 106 888 894 0.06 621 594 378 406 0.08 078 126 921 874 0.1 462 916 537 084 0.2 702 589 297 411 0.3 626 759 373 241 0.4 392 355 607 645 0.5 499 878 500 122 0.6 856 091 143 909 0.7 801 194 198 806 0.8 100 965 899 035 0.9 908 212 091 788 1 700 793 299 207 1.1 205 07 794 93 1.2 313 978 686 022 1.3 007 945 992 055 1.4 285 12 714 88 1.5 105 146 894 854 1.6 348 383 651 617 1.7 790 459 209 541 1.8 090 502 909 498 1.9 790 429 209 571 2 322 265 677 735 2.1 020 533 979 467 2.2 137 154 862 846 2.3 856 823 143 177 2.4 311 486 688 514 2.5 593 048 406 952 3 977 91 022 09 3.5 999 257 000 743
Související funkce Funkce doplňkové chyby The doplňková chybová funkce , označeno E r F C { displaystyle mathrm {erfc}}
erfc ( X ) = 1 − erf ( X ) = 2 π ∫ X ∞ E − t 2 d t = E − X 2 erfcx ( X ) , { displaystyle { begin {aligned} operatorname {erfc} (x) & = 1- operatorname {erf} (x) [5pt] & = { frac {2} { sqrt { pi}} } int _ {x} ^ { infty} e ^ {- t ^ {2}} , dt [5pt] & = e ^ {- x ^ {2}} operatorname {erfcx} (x) , end {zarovnáno}}} který také definuje E r F C X { displaystyle mathrm {erfcx}} škálovaná doplňková chybová funkce [21] aritmetické podtečení [21] [22] erfc ( X ) { displaystyle operatorname {erfc} (x)} X { displaystyle x} [23]
erfc ( X ∣ X ≥ 0 ) = 2 π ∫ 0 π / 2 exp ( − X 2 hřích 2 θ ) d θ . { displaystyle operatorname {erfc} (x mid x geq 0) = { frac {2} { pi}} int _ {0} ^ { pi / 2} exp left (- { frac {x ^ {2}} { sin ^ {2} theta}} right) , d theta.} Tento výraz je platný pouze pro kladné hodnoty X , ale lze jej použít ve spojení s erfc (X ) = 2 - erfc (-X ) získat erfc (X ) pro záporné hodnoty. Tato forma je výhodná v tom, že rozsah integrace je pevný a konečný. Rozšíření tohoto výrazu pro E r F C { displaystyle mathrm {erfc}} [24]
erfc ( X + y ∣ X , y ≥ 0 ) = 2 π ∫ 0 π / 2 exp ( − X 2 hřích 2 θ − y 2 cos 2 θ ) d θ . { displaystyle operatorname {erfc} (x + y mid x, y geq 0) = { frac {2} { pi}} int _ {0} ^ { pi / 2} exp vlevo (- { frac {x ^ {2}} { sin ^ {2} theta}} - { frac {y ^ {2}} { cos ^ {2} theta}} vpravo) , d theta.} Funkce imaginární chyby The funkce imaginární chyby , označeno erfi , je definován jako
erfi ( X ) = − i erf ( i X ) = 2 π ∫ 0 X E t 2 d t = 2 π E X 2 D ( X ) , { displaystyle { begin {aligned} operatorname {erfi} (x) & = - i operatorname {erf} (ix) [5pt] & = { frac {2} { sqrt { pi}} } int _ {0} ^ {x} e ^ {t ^ {2}} , dt [5pt] & = { frac {2} { sqrt { pi}}} e ^ {x ^ {2}} D (x), end {zarovnáno}}} kde D (X ) je Dawsonova funkce (které lze použít místo erfi, aby se zabránilo aritmetické přetečení [21]
Přes název „imaginární chybová funkce“, erfi ( X ) { displaystyle operatorname {erfi} (x)} X je skutečný.
Když je chybová funkce vyhodnocena jako libovolná komplex argumenty z , výsledný funkce komplexní chyby je obvykle diskutována v zmenšené formě jako Faddeevova funkce :
w ( z ) = E − z 2 erfc ( − i z ) = erfcx ( − i z ) . { displaystyle w (z) = e ^ {- z ^ {2}} operatorname {erfc} (-iz) = operatorname {erfcx} (-iz).} Funkce kumulativní distribuce Chybová funkce je v podstatě shodná se standardem normální kumulativní distribuční funkce , označeno Φ, také pojmenovaná norma (X ) některými softwarovými jazyky[Citace je zapotřebí , protože se liší pouze měřítkem a překladem. Vskutku,
Φ ( X ) = 1 2 π ∫ − ∞ X E − t 2 2 d t = 1 2 [ 1 + erf ( X 2 ) ] = 1 2 erfc ( − X 2 ) { displaystyle Phi (x) = { frac {1} { sqrt {2 pi}}} int _ {- infty} ^ {x} e ^ { tfrac {-t ^ {2}} {2}} , dt = { frac {1} {2}} left [1+ operatorname {erf} left ({ frac {x} { sqrt {2}}} right) right ] = { frac {1} {2}} operatorname {erfc} left (- { frac {x} { sqrt {2}}} right)} nebo přeskupené pro erf a erfc:
erf ( X ) = 2 Φ ( X 2 ) − 1 erfc ( X ) = 2 Φ ( − X 2 ) = 2 ( 1 − Φ ( X 2 ) ) . { displaystyle { begin {aligned} operatorname {erf} (x) & = 2 Phi left (x { sqrt {2}} right) -1 operatorname {erfc} (x) & = 2 Phi left (-x { sqrt {2}} right) = 2 left (1- Phi left (x { sqrt {2}} right) right). End {aligned} }} Chybová funkce proto úzce souvisí také s Q-funkce , což je ocasní pravděpodobnost standardního normálního rozdělení. Q-funkci lze vyjádřit z hlediska chybové funkce jako
Q ( X ) = 1 2 − 1 2 erf ( X 2 ) = 1 2 erfc ( X 2 ) . { displaystyle Q (x) = { frac {1} {2}} - { frac {1} {2}} operatorname {erf} left ({ frac {x} { sqrt {2}} } right) = { frac {1} {2}} operatorname {erfc} left ({ frac {x} { sqrt {2}}} right).} The inverzní z Φ { displaystyle Phi} normální kvantilová funkce nebo probit funkce a lze ji vyjádřit pomocí funkce inverzní chyby jako
probit ( str ) = Φ − 1 ( str ) = 2 erf − 1 ( 2 str − 1 ) = − 2 erfc − 1 ( 2 str ) . { displaystyle operatorname {probit} (p) = Phi ^ {- 1} (p) = { sqrt {2}} operatorname {erf} ^ {- 1} (2p-1) = - { sqrt {2}} operatorname {erfc} ^ {- 1} (2p).} Standardní normální cdf se používá častěji v pravděpodobnosti a statistice a chybová funkce se používá častěji v jiných oborech matematiky.
Chybová funkce je zvláštním případem Funkce Mittag-Leffler , a lze jej také vyjádřit jako a konfluentní hypergeometrická funkce (Kummerova funkce):
erf ( X ) = 2 X π M ( 1 2 , 3 2 , − X 2 ) . { displaystyle operatorname {erf} (x) = { frac {2x} { sqrt { pi}}} M vlevo ({ frac {1} {2}}, { frac {3} {2 }}, - x ^ {2} vpravo).} Má jednoduchý výraz, pokud jde o Fresnelovy integrály .[je třeba další vysvětlení
Z hlediska regularizovaná funkce gama P a neúplná funkce gama ,
erf ( X ) = sgn ( X ) P ( 1 2 , X 2 ) = sgn ( X ) π y ( 1 2 , X 2 ) . { displaystyle operatorname {erf} (x) = operatorname {sgn} (x) P left ({ frac {1} {2}}, x ^ {2} right) = { frac { operatorname {sgn} (x)} { sqrt { pi}}} gamma left ({ frac {1} {2}}, x ^ {2} right).} sgn ( X ) { displaystyle operatorname {sgn} (x)} znaková funkce .
Zobecněné chybové funkce Graf zobecněných chybových funkcí
En (
X ):
šedá křivka:
E 1 (
X ) = (1 - např
−X )/
π { displaystyle scriptstyle { sqrt { pi}}} červená křivka:
E 2 (
X ) = erf (
X )
zelená křivka:
E 3 (
X )
modrá křivka:
E 4 (
X )
zlatá křivka:
E 5 (
X ).
Někteří autoři diskutují o obecnějších funkcích:[Citace je zapotřebí
E n ( X ) = n ! π ∫ 0 X E − t n d t = n ! π ∑ str = 0 ∞ ( − 1 ) str X n str + 1 ( n str + 1 ) str ! . { displaystyle E_ {n} (x) = { frac {n!} { sqrt { pi}}} int _ {0} ^ {x} e ^ {- t ^ {n}} , dt = { frac {n!} { sqrt { pi}}} sum _ {p = 0} ^ { infty} (- 1) ^ {p} { frac {x ^ {np + 1}} {(np + 1) p!}}.} Pozoruhodné případy jsou:
E 0 (X ) je přímka procházející počátkem: E 0 ( X ) = X E π { displaystyle textstyle E_ {0} (x) = { dfrac {x} {e { sqrt { pi}}}}} E 2 (X ) je chybová funkce, erf (X ).Po rozdělení n !, všechny En pro liché n vypadat navzájem podobně (ale ne identicky). Podobně En dokonce n vypadat podobně (ale ne identicky) navzájem po jednoduchém dělení n !. Všechny zobecněné chybové funkce pro n > 0 vypadá pozitivně podobně X straně grafu.
Tyto zobecněné funkce lze ekvivalentně vyjádřit pro X > 0 pomocí funkce gama a neúplná funkce gama :
E n ( X ) = 1 π Γ ( n ) ( Γ ( 1 n ) − Γ ( 1 n , X n ) ) , X > 0. { displaystyle E_ {n} (x) = { frac {1} { sqrt { pi}}} Gamma (n) left ( Gamma left ({ frac {1} {n}} right) - Gamma left ({ frac {1} {n}}, x ^ {n} right) right), quad quad x> 0.} Můžeme tedy definovat chybovou funkci z hlediska neúplné funkce gama:
erf ( X ) = 1 − 1 π Γ ( 1 2 , X 2 ) . { displaystyle operatorname {erf} (x) = 1 - { frac {1} { sqrt { pi}}} Gamma left ({ frac {1} {2}}, x ^ {2} že jo).} Iterované integrály doplňkové chybové funkce Iterované integrály doplňkové chybové funkce jsou definovány pomocí[25]
i n E r F C ( z ) = ∫ z ∞ i n - 1 E r F C ( ζ ) d ζ i 0 E r F C ( z ) = erfc ( z ) i 1 E r F C ( z ) = ierfc ( z ) = 1 π E − z 2 − z erfc ( z ) i 2 E r F C ( z ) = 1 4 [ erfc ( z ) − 2 z ierfc ( z ) ] { displaystyle { begin {aligned} operatorname {i ^ {n} erfc} (z) & = int _ {z} ^ { infty} operatorname {i ^ {n-1} erfc} ( zeta ) , d zeta operatorname {i ^ {0} erfc} (z) & = operatorname {erfc} (z) operatorname {i ^ {1} erfc} (z) & = operatorname {ierfc} (z) = { frac {1} { sqrt { pi}}} e ^ {- z ^ {2}} - z operatorname {erfc} (z) operatorname {i ^ { 2} erfc} (z) & = { frac {1} {4}} left [ operatorname {erfc} (z) -2z operatorname {ierfc} (z) right] end {zarovnáno} }} Obecný vzorec opakování je
2 n i n E r F C ( z ) = i n - 2 E r F C ( z ) − 2 z i n - 1 E r F C ( z ) { displaystyle 2n operatorname {i ^ {n} erfc} (z) = operatorname {i ^ {n-2} erfc} (z) -2z operatorname {i ^ {n-1} erfc} (z) } Mají výkonovou řadu
i n erfc ( z ) = ∑ j = 0 ∞ ( − z ) j 2 n − j j ! Γ ( 1 + n − j 2 ) , { displaystyle i ^ {n} operatorname {erfc} (z) = součet _ {j = 0} ^ { infty} { frac {(-z) ^ {j}} {2 ^ {nj} j ! Gamma left (1 + { frac {nj} {2}} right)}},} ze kterého následují vlastnosti symetrie
i 2 m erfc ( − z ) = − i 2 m erfc ( z ) + ∑ q = 0 m z 2 q 2 2 ( m − q ) − 1 ( 2 q ) ! ( m − q ) ! { displaystyle i ^ {2m} operatorname {erfc} (-z) = - i ^ {2m} operatorname {erfc} (z) + sum _ {q = 0} ^ {m} { frac {z ^ {2q}} {2 ^ {2 (mq) -1} (2q)! (Mq)!}}} a
i 2 m + 1 erfc ( − z ) = i 2 m + 1 erfc ( z ) + ∑ q = 0 m z 2 q + 1 2 2 ( m − q ) − 1 ( 2 q + 1 ) ! ( m − q ) ! . { displaystyle i ^ {2m + 1} operatorname {erfc} (-z) = i ^ {2m + 1} operatorname {erfc} (z) + sum _ {q = 0} ^ {m} { frac {z ^ {2q + 1}} {2 ^ {2 (mq) -1} (2q + 1)! (mq)!}}.} Implementace Jako skutečná funkce skutečného argumentu Jako komplexní funkce komplexního argumentu libcerf numerická knihovna C pro komplexní chybové funkce poskytuje komplexní funkce cerf , cerfc , cerfcx a skutečné funkce erfi , erfcx s přesností přibližně 13–14 číslic, na základě Faddeevova funkce jak je implementováno v Balíček MIT Faddeeva Viz také Související funkce Pravděpodobně Reference ^ Andrews, Larry C. (1998). Speciální funkce matematiky pro inženýry ISBN 9780819426161 ^ Glaisher, James Whitbread Lee (červenec 1871). „Na třídu určitých integrálů“ . London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science . 4. 42 (277): 294–302. doi :10.1080/14786447108640568 . Citováno 6. prosince 2017 . ^ Glaisher, James Whitbread Lee (září 1871). „Na třídu určitých integrálů. Část II“ . London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science . 4. 42 (279): 421–436. doi :10.1080/14786447108640600 . Citováno 6. prosince 2017 . ^ „A007680 - OEIS“ . oeis.org . Citováno 2. dubna 2020 .^ Weisstein, Eric W. „Erf“ . MathWorld . Wolfram. ^ H. M. Schöpf a P. H. Supancic, „O Bürmannově větě a její aplikaci na problémy lineárního a nelineárního přenosu tepla a difúze“, The Mathematica Journal, 2014. doi: 10,3888 / tmj.16–11.Schöpf, Supancic ^ Weisstein, E. W. „Bürmannova věta“ . Wolfram MathWorld - webový zdroj Wolfram .^ Bergsma, Wicher (2006). "O novém korelačním koeficientu, jeho ortogonálním rozkladu a souvisejících testech nezávislosti". arXiv :matematika / 0604627 ^ Cuyt, Annie A. M .; Petersen, Vigdis B .; Verdonk, Brigitte; Waadeland, Haakon; Jones, William B. (2008). Příručka pokračujících zlomků pro speciální funkce . Springer-Verlag. ISBN 978-1-4020-6948-2 ^ Schlömilch, Oskar Xavier (1859). „Ueber facultätenreihen“ . Zeitschrift für Mathematik und Physik 4 : 390–415. Citováno 4. prosince 2017 .^ Eq (3) na straně 283 z Nielson, Niels (1906). Handbuch der Theorie der Gammafunktion . Citováno 4. prosince 2017 . ^ Chiani, M .; Dardari, D .; Simon, M.K. (2003). „Nové exponenciální hranice a aproximace pro výpočet pravděpodobnosti chyby v únikových kanálech“ (PDF) . Transakce IEEE v bezdrátové komunikaci . 2 (4): 840–845. CiteSeerX 10.1.1.190.6761 doi :10.1109 / TWC.2003.814350 . ^ Tanash, I.M .; Riihonen, T. (2020). "Globální aproximace minimax a hranice pro Gaussovu Q-funkci součtem exponenciálů". Transakce IEEE na komunikaci . 68 (10): 6514–6524. arXiv :2007.06939 doi :10.1109 / TCOMM.2020.3006902 . S2CID 220514754 . ^ Tanash, I.M .; Riihonen, T. (2020). „Koeficienty pro globální aproximace minimaxu a hranice pro Gaussovu Q-funkci podle součtů exponenciál [datová sada]“ . Zenodo . doi :10,5281 / zenodo.4112978 . ^ Karagiannidis, G. K., & Lioumpas, A. S. Vylepšená aproximace pro Gaussovu Q-funkci ^ Chang, Seok-Ho; Cosman, Pamela C .; Milstein, Laurence B. (listopad 2011). "Meze typu černoff pro Gaussovu chybovou funkci" . Transakce IEEE na komunikaci . 59 (11): 2939–2944. doi :10.1109 / TCOMM.2011.072011.100049 . S2CID 13636638 . ^ Winitzki, Serge (2003). "Jednotná aproximace pro transcendentální funkce" Poznámky k přednášce ve Výpočtu. Sci 2667 . Spronger, Berlín. str.780–789 . doi :10.1007 / 3-540-44839-X_82 . ISBN 978-3-540-40155-1 X ")^ Zeng, Caibin; Chen, Yang Cuan (2015). „Globální Padé aproximace zobecněné Mittag-Lefflerovy funkce a její inverze“. Frakční kalkul a aplikovaná analýza . 18 (6): 1492–1506. arXiv :1310.5592 doi :10.1515 / fca-2015-0086 . S2CID 118148950 . Winitzki [32] skutečně poskytl takzvanou globální Padé aproximaci ^ Winitzki, Sergei (6. února 2008). Msgstr "Praktická aproximace chybové funkce a její inverzní funkce". ^ Numerické recepty ve Fortranu 77: Umění vědeckých výpočtů (ISBN 0-521-43064-X), 1992, strana 214, Cambridge University Press. ^ A b C Cody, W. J. (březen 1993), „Algorithm 715: SPECFUN — Portable FORTRAN package of special function routines and test drivers“ (PDF) , ACM Trans. Matematika. Softw. 19 (1): 22–32, CiteSeerX 10.1.1.643.4394 doi :10.1145/151271.151273 , S2CID 5621105 ^ Zaghloul, M. R. (1. března 2007), „Při výpočtu profilu Voigtovy čáry: jediný správný integrál s tlumeným sinusovým integrandem“ , Měsíční oznámení Královské astronomické společnosti 375 (3): 1043–1048, doi :10.1111 / j.1365-2966.2006.11377.x ^ John W. Craig, Nový, jednoduchý a přesný výsledek pro výpočet pravděpodobnosti chyby pro dvourozměrné konstelace signálu Archivováno 3. dubna 2012 v Wayback Machine , Proceedings of the IEEE Military Communication Conference 1991, sv. 2, str. 571–575. ^ Behnad, Aydin (2020). „Nové rozšíření Craigova vzorce Q-funkce a jeho aplikace v analýze výkonu EGC s dvěma pobočkami“. Transakce IEEE na komunikaci . 68 (7): 4117–4125. doi :10.1109 / TCOMM.2020.2986209 . S2CID 216500014 . ^ Carslaw, H. S. ; Jaeger, J. C. (1959), Vedení tepla v pevných látkách (2. vyd.), Oxford University Press, ISBN 978-0-19-853368-9 ^ https://pubs.opengroup.org/onlinepubs/9699919799/basedefs/math.h.html ^ https://www.gnu.org/software/gsl/doc/html/specfunc.html#error-functions Další čtení Abramowitz, Milton ; Stegun, Irene Ann , eds. (1983) [červen 1964]. „Kapitola 7“ . Příručka matematických funkcí se vzorci, grafy a matematickými tabulkami 55 (Devátý dotisk s dalšími opravami desátého originálu s opravami (prosinec 1972); první vydání.). Washington DC.; New York: United States Department of Commerce, National Bureau of Standards; Dover Publications. str. 297. ISBN 978-0-486-61272-0 LCCN 64-60036 . PAN 0167642 . LCCN 65-12253 .Press, William H .; Teukolsky, Saul A .; Vetterling, William T .; Flannery, Brian P. (2007), „Část 6.2. Neúplná funkce gama a chybová funkce“ , Numerické recepty: Umění vědecké práce na počítači (3. vyd.), New York: Cambridge University Press, ISBN 978-0-521-88068-8 Temme, Nico M. (2010), „Chybové funkce, Dawsonova a Fresnelova integrace“ , v Olver, Frank W. J. ; Lozier, Daniel M .; Boisvert, Ronald F .; Clark, Charles W. (eds.), NIST Handbook of Mathematical Functions ISBN 978-0-521-19225-5 PAN 2723248 externí odkazy Kontrolní úřad









![Xsim operatorname {Norm} [mu ,sigma ]](https://wikimedia.org/api/rest_v1/media/math/render/svg/84024bc6827355ec6d23a062283a26d54b29698d)

![{displaystyle Pr[Xleq L]={frac {1}{2}}+{frac {1}{2}}operatorname {erf} left({frac {L-mu }{{sqrt {2}}sigma }}
ight)approx Aexp left(-Bleft({frac {L-mu }{sigma }}
ight)^{2}
ight)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a72302c46832449e128a4d4e1adb28b514131270)

![{displaystyle Pr[Xleq L]leq Aexp(-Bln {k})={frac {A}{k^{B}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2baadea015e20a45d1034fd88eed861e7fcce178)


















![{ displaystyle { begin {aligned} operatorname {erf} (x) & = { frac {2} { sqrt { pi}}} operatorname {sgn} (x) { sqrt {1-e ^ {-x ^ {2}}}} left (1 - { frac {1} {12}} left (1-e ^ {- x ^ {2}} right) - { frac {7} {480}} left (1-e ^ {- x ^ {2}} right) ^ {2} - { frac {5} {896}} left (1-e ^ {- x ^ {2 }} right) ^ {3} - { frac {787} {276480}} left (1-e ^ {- x ^ {2}} right) ^ {4} - cdots right) [10pt] & = { frac {2} { sqrt { pi}}} operatorname {sgn} (x) { sqrt {1-e ^ {- x ^ {2}}}}} vlevo ({ frac { sqrt { pi}} {2}} + sum _ {k = 1} ^ { infty} c_ {k} e ^ {- kx ^ {2}} right). end {zarovnáno }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/24ddba05e595a553fee25644a3542188281bd844)

















![{ displaystyle operatorname {erfc} (x) = { frac {e ^ {- x ^ {2}}} {x { sqrt { pi}}}} vlevo [1+ součet _ {n = 1} ^ { infty} (- 1) ^ {n} { frac {1 cdot 3 cdot 5 cdots (2n-1)} {(2x ^ {2}) ^ {n}}} vpravo ] = { frac {e ^ {- x ^ {2}}} {x { sqrt { pi}}}} sum _ {n = 0} ^ { infty} (- 1) ^ {n} { frac {(2n-1) !!} {(2x ^ {2}) ^ {n}}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fc8c3aefff3ba787b080c5186dd3aec8ec76ef9)







![{ displaystyle int _ {- infty} ^ { infty} operatorname {erf} left (ax + b right) { frac {1} { sqrt {2 pi sigma ^ {2}} }} e ^ {- { frac {(x- mu) ^ {2}} {2 sigma ^ {2}}}} , dx = operatorname {erf} left [{ frac {a mu + b} { sqrt {1 + 2a ^ {2} sigma ^ {2}}}} right], qquad a, b, mu, sigma in mathbb {R}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b6adc2c661b24b44dc1e3d7e16be70023daacd8)



































![{ displaystyle { begin {aligned} operatorname {erfc} (x) & = 1- operatorname {erf} (x) [5pt] & = { frac {2} { sqrt { pi}} } int _ {x} ^ { infty} e ^ {- t ^ {2}} , dt [5pt] & = e ^ {- x ^ {2}} operatorname {erfcx} (x) , end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8808e6f3ad9aab23f14d55db707a39388d256788)



![{ displaystyle { begin {aligned} operatorname {erfi} (x) & = - i operatorname {erf} (ix) [5pt] & = { frac {2} { sqrt { pi}} } int _ {0} ^ {x} e ^ {t ^ {2}} , dt [5pt] & = { frac {2} { sqrt { pi}}} e ^ {x ^ {2}} D (x), end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4480a8ec17e274a7ad6b8ef25cc76234d48c0433)


![{ displaystyle Phi (x) = { frac {1} { sqrt {2 pi}}} int _ {- infty} ^ {x} e ^ { tfrac {-t ^ {2}} {2}} , dt = { frac {1} {2}} left [1+ operatorname {erf} left ({ frac {x} { sqrt {2}}} right) right ] = { frac {1} {2}} operatorname {erfc} left (- { frac {x} { sqrt {2}}} right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e19dc7206f8b3b571e81153816c478abd91a679e)













![{ displaystyle { begin {aligned} operatorname {i ^ {n} erfc} (z) & = int _ {z} ^ { infty} operatorname {i ^ {n-1} erfc} ( zeta ) , d zeta operatorname {i ^ {0} erfc} (z) & = operatorname {erfc} (z) operatorname {i ^ {1} erfc} (z) & = operatorname {ierfc} (z) = { frac {1} { sqrt { pi}}} e ^ {- z ^ {2}} - z operatorname {erfc} (z) operatorname {i ^ { 2} erfc} (z) & = { frac {1} {4}} left [ operatorname {erfc} (z) -2z operatorname {ierfc} (z) right] end {zarovnáno} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66b57abb0a01139b31a14f5a8d651e4aa2e5f4f2)



