Orientovatelnost - Orientability



v matematika, orientovatelnost je majetkem povrchy v Euklidovský prostor to měří, zda je možné důsledně vybírat povrch normální vektor v každém bodě. Volba normálního vektoru umožňuje použít pravidlo pravé ruky podle potřeby definovat směr smyček v povrchu ve směru hodinových ručiček Stokesova věta například. Obecněji řečeno, orientovatelnost abstraktního povrchu, nebo potrubí, měří, zda lze konzistentně zvolit orientaci ve směru hodinových ručiček pro všechny smyčky v potrubí. Ekvivalentně, a povrch je orientovatelný pokud je dvojrozměrný postava (jako ![]() ) v prostoru nelze nepřetržitě pohybovat na tomto povrchu a zpět do jeho počátečního bodu, takže vypadá jako jeho vlastní zrcadlový obraz (
) v prostoru nelze nepřetržitě pohybovat na tomto povrchu a zpět do jeho počátečního bodu, takže vypadá jako jeho vlastní zrcadlový obraz (![]() ).
).
Pojem orientovatelnosti lze zobecnit na vícerozměrný rozdělovače také.[1] Rozdělovač je orientovatelný, pokud má konzistentní výběr orientace a připojeno orientovatelné potrubí má přesně dvě různé možné orientace. V tomto nastavení lze uvést různé ekvivalentní formulace orientovatelnosti v závislosti na požadované aplikaci a úrovni obecnosti. Formulace použitelné pro obecná topologická potrubí často používají metody teorie homologie, zatímco pro diferencovatelné potrubí je přítomna větší struktura, což umožňuje formulaci ve smyslu diferenciální formy. Důležitým zobecněním pojmu orientovatelnosti prostoru je orientovatelnost rodiny prostorů parametrizovaných nějakým jiným prostorem (a svazek vláken ), pro které musí být v každém z prostorů zvolena orientace, která se průběžně mění s ohledem na změny hodnot parametrů.
Orientovatelné povrchy

Povrch S v Euklidovský prostor R3 je orientovatelný, pokud je dvourozměrná postava (například ![]() ) nelze přesouvat po povrchu a zpět na místo, kde to začalo, takže to vypadá jako jeho vlastní zrcadlový obraz (
) nelze přesouvat po povrchu a zpět na místo, kde to začalo, takže to vypadá jako jeho vlastní zrcadlový obraz (![]() ). Jinak je povrch neorientovatelný. Abstraktní povrch (tj. Dvojrozměrný potrubí ) je orientovatelný, pokud lze na povrchu kontinuálně definovat konzistentní koncept otáčení ve směru hodinových ručiček. To znamená, že smyčka procházející jednou cestou na povrchu nemůže být nikdy nepřetržitě deformována (aniž by se překrývala) na smyčku obíhající opačnou cestou. Ukázalo se, že to odpovídá otázce, zda povrch neobsahuje žádnou podmnožinu homeomorfní do Möbiusův proužek. U povrchů lze tedy Möbiovu pásku považovat za zdroj veškeré neorientovatelnosti.
). Jinak je povrch neorientovatelný. Abstraktní povrch (tj. Dvojrozměrný potrubí ) je orientovatelný, pokud lze na povrchu kontinuálně definovat konzistentní koncept otáčení ve směru hodinových ručiček. To znamená, že smyčka procházející jednou cestou na povrchu nemůže být nikdy nepřetržitě deformována (aniž by se překrývala) na smyčku obíhající opačnou cestou. Ukázalo se, že to odpovídá otázce, zda povrch neobsahuje žádnou podmnožinu homeomorfní do Möbiusův proužek. U povrchů lze tedy Möbiovu pásku považovat za zdroj veškeré neorientovatelnosti.
U orientovatelného povrchu se důsledná volba „ve směru hodinových ručiček“ (na rozdíl od proti směru hodinových ručiček) nazývá orientacea povrch se nazývá orientované. Pro povrchy vložené do euklidovského prostoru je orientace určena výběrem kontinuálně se měnícího povrch normální n v každém bodě. Pokud taková normální vůbec existuje, existují vždy dva způsoby, jak ji vybrat: n nebo -n. Obecněji řečeno, orientovatelná plocha připouští přesně dvě orientace a rozdíl mezi orientemvyd povrch a orientschopný povrch je jemný a často rozmazaný. Orientovatelný povrch je abstraktní povrch, který připouští orientaci, zatímco orientovaný povrch je povrch, který je abstraktně orientovatelný a má dodatečný vztažný bod volby jedné ze dvou možných orientací.
Příklady
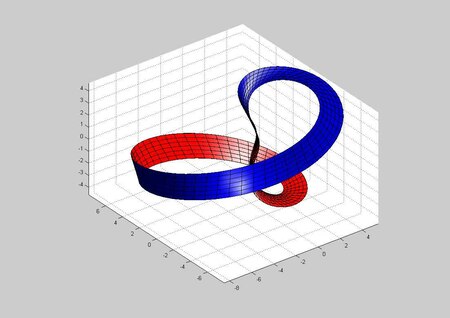
Většina povrchů, se kterými se ve fyzickém světě setkáváme, je orientovatelných. Koule, letadla, a Tori jsou například orientovatelné. Ale Möbiovy proužky, skutečné projektivní roviny, a Klein lahve jsou neorientovatelní. Jak je zobrazeno ve 3 dimenzích, všechny mají pouze jednu stranu. Skutečnou projektivní rovinu a Kleinovu láhev nelze vložit R3, pouze ponořený s pěknými křižovatkami.
Všimněte si, že lokálně má vložený povrch vždy dvě strany, takže krátkozraký mravenec plazící se na jednostranném povrchu by si myslel, že existuje „druhá strana“. Podstata jednostrannosti spočívá v tom, že se mravenec může plazit z jedné strany povrchu na „druhou“, aniž by prošel povrchem nebo převrátil hranu, ale jednoduše plazil dostatečně daleko.
Obecně platí, že vlastnost být orientovatelná není ekvivalentní oboustrannosti; to však platí, když okolní prostor (např R3 výše) je orientovatelný. Například torus vložený do

může být jednostranný a Kleinova láhev ve stejném prostoru může být oboustranný; tady odkazuje na Kleinovu láhev.

Orientace pomocí triangulace
Jakýkoli povrch má a triangulace: rozklad na trojúhelníky tak, že každá hrana na trojúhelníku je přilepena k nejvýše jedné další hraně. Každý trojúhelník je orientován výběrem směru po obvodu trojúhelníku a přiřazením směru ke každému okraji trojúhelníku. Pokud je to provedeno takovým způsobem, že při slepení sousední hrany směřují v opačném směru, pak to určuje orientaci povrchu. Taková volba je možná pouze v případě, že je povrch orientovatelný, a v tomto případě existují přesně dvě různé orientace.
Pokud obrázek ![]() může být důsledně umístěno ve všech bodech povrchu, aniž by se otočilo do jeho zrcadlového obrazu, pak to vyvolá orientaci ve výše uvedeném smyslu na každém z trojúhelníků triangulace výběrem směru každého z trojúhelníků na základě pořadí červeno- zeleno-modré barvy kterékoli z postav uvnitř trojúhelníku.
může být důsledně umístěno ve všech bodech povrchu, aniž by se otočilo do jeho zrcadlového obrazu, pak to vyvolá orientaci ve výše uvedeném smyslu na každém z trojúhelníků triangulace výběrem směru každého z trojúhelníků na základě pořadí červeno- zeleno-modré barvy kterékoli z postav uvnitř trojúhelníku.
Tento přístup se zobecňuje na jakýkoli n- potrubí s triangulací. Některá čtyřnásobná potrubí však nemají triangulaci a obecně pro n > 4 některé n-manifolds mají triangulace, které jsou nerovnoměrné.
Orientovatelnost a homologie
Li H1(S) označuje první homologie skupina povrchu S, pak S je orientovatelný právě tehdy H1(S) má triviální torzní podskupina. Přesněji řečeno, pokud S je tedy orientovatelný H1(S) je bezplatná abelianská skupina, a pokud ne, pak H1(S) = F + Z/2Z kde F je zdarma abelian a Z/2Z faktor je generován střední křivkou v a Möbiova kapela vloženo do S.
Orientovatelnost potrubí
Nechat M být propojenou topologií n-potrubí. Existuje několik možných definic toho, co to znamená M být orientovatelný. Některé z těchto definic to vyžadují M má zvláštní strukturu, jako je rozlišitelnost. Občas, n = 0 musí být vyroben do zvláštního případu. Pokud platí více než jedna z těchto definic M, pak M je orientovatelný podle jedné definice právě tehdy, pokud je orientovatelný podle ostatních.[2][3]
Orientovatelnost diferencovatelných potrubí
To vyžadují nejintuitivnější definice M být diferencovatelné potrubí. To znamená, že přechod funguje v atlasu M jsou C1-funkce. Taková funkce připouští a Jacobian determinant. Když je Jacobian determinant pozitivní, říká se, že přechodová funkce je zachování orientace. An orientovaný atlas na M je atlas, pro který všechny přechodové funkce zachovávají orientaci. M je orientovatelný pokud připouští orientovaný atlas. Když n > 0, an orientace z M je maximálně orientovaný atlas. (Když n = 0, orientace M je funkce M → {±1}.)
Orientovatelnost a orientace lze také vyjádřit pomocí tangenta svazku. Tečný svazek je a vektorový svazek, takže je svazek vláken s strukturní skupina GL (n, R). To znamená, že přechodové funkce potrubí indukují přechodové funkce na tangenciálním svazku, což jsou vláknové lineární transformace. Pokud lze skupinu struktur snížit na skupinu GL+(n, R) pozitivních determinantních matic nebo ekvivalentně, pokud existuje atlas, jehož přechodové funkce určují orientaci zachovávající lineární transformaci na každém tangenciálním prostoru, pak potrubí M je orientovatelný. Naopak, M je orientovatelný právě tehdy, když lze tímto způsobem zmenšit skupinu struktur tangenta svazku. Podobná pozorování lze provést pro svazek rámců.
Další způsob, jak definovat orientace na diferencovatelném potrubí, je projít objemové formuláře. Objemový formulář není nikde mizející sekce ω z ⋀n T∗M, nejvyšší vnější síla kotangensového svazku M. Například, Rn má standardní formu svazku danou dx1 ∧ ... ∧ dxn. Vzhledem k objemu svazku dne M, sbírka všech grafů U → Rn pro které se standardní objemový formulář táhne zpět na kladný násobek ω je orientovaný atlas. Existence objemové formy je tedy ekvivalentní orientovatelnosti potrubí.
Objemové tvary a vektory tečny lze kombinovat a poskytnout tak další popis orientovatelnosti. Li X1, ..., Xn je základem tečných vektorů v bodě str, pak se říká, že základ je pravák -li ω (X1, ..., Xn) > 0. Přechodová funkce je zachování orientace právě tehdy, když posílá základny pro praváky na základny pro praváky. Existence objemové formy implikuje zmenšení skupiny struktur tangentového svazku nebo svazku rámců na GL+(n, R). Stejně jako dříve to znamená orientovatelnost M. Naopak, pokud M je orientovatelný, pak lze lokální svazkové formuláře spojit dohromady a vytvořit tak globální objemový formulář, přičemž je nutná orientovatelnost, aby se zajistilo, že globální formulář nikde nezmizí.
Homologie a orientovatelnost obecných variet
Jádrem všech výše uvedených definic orientovatelnosti diferencovatelného potrubí je pojem přechodové funkce zachovávající orientaci. To vyvolává otázku, co přesně takové přechodové funkce zachovávají. Nemohou zachovávat orientaci potrubí, protože orientace potrubí je atlas a nemá smysl říkat, že přechodová funkce zachovává nebo nezachovává atlas, jehož je členem.
Tuto otázku lze vyřešit definováním místních orientací. Na jednorozměrném potrubí lokální orientace kolem bodu str odpovídá volbě vlevo a vpravo v blízkosti tohoto bodu. Na dvourozměrném potrubí odpovídá volbě ve směru hodinových ručiček a proti směru hodinových ručiček. Tyto dvě situace sdílejí společný rys, který jsou popsány z hlediska top-dimenzionálního chování v blízkosti str ale ne v str. Pro obecný případ, pojďme M být topologická n- potrubí. A místní orientace z M kolem bodu str je volba generátoru skupiny

Chcete-li zobrazit geometrický význam této skupiny, vyberte graf kolem str. V tomto grafu je sousedství str což je otevřená koule B kolem původu Ó. Podle excizní věta, je izomorfní s . Míček B je stahovatelný, takže jeho homologické skupiny mizí s výjimkou stupně nula a prostoru B \ Ó je (n − 1)- koule, takže její homologické skupiny mizí s výjimkou stupňů n − 1 a 0. Výpočet s dlouhá přesná sekvence v relativní homologie ukazuje, že výše uvedená skupina homologie je isomorfní s . Volba generátoru proto odpovídá rozhodnutí, zda je v daném grafu koule kolem str je pozitivní nebo negativní. Odraz Rn prostřednictvím původu působí negací na , takže geometrický význam volby generátoru spočívá v tom, že odlišuje grafy od jejich odrazů.




Na topologickém potrubí je přechodová funkce zachování orientace pokud v každém bodě str ve své doméně opravuje generátory . Odtud jsou příslušné definice stejné jako v rozlišitelném případě. An orientovaný atlas je jeden, u kterého všechny přechodové funkce zachovávají orientaci, M je orientovatelný pokud připouští orientovaný atlas a kdy n > 0, an orientace z M je maximálně orientovaný atlas.
Intuitivně, orientace M by měl definovat jedinečnou místní orientaci M v každém bodě. To je zpřesněno tím, že je uveden jakýkoli graf v orientovaném atlasu kolem str lze použít k určení koule kolem stra tato koule určuje generátor . Navíc jakýkoli jiný graf kolem str souvisí s prvním grafem funkcí přechodu zachovávající orientaci, což znamená, že dva grafy poskytují stejný generátor, odkud je generátor jedinečný.
Možné jsou také čistě homologické definice. Za předpokladu, že M je uzavřen a připojen, M je orientovatelný jen a jen pokud nskupina homologie je izomorfní s celými čísly Z. An orientace z M je volba generátoru α této skupiny. Tento generátor určuje orientovaný atlas fixací generátoru nekonečné cyklické skupiny a brát orientované mapy jako ty, pro které α tlačí dopředu k pevnému generátoru. Naopak orientovaný atlas určuje takový generátor, protože kompatibilní lokální orientace mohou být slepeny dohromady, aby poskytly generátor pro skupinu homologie .[4]

Orientace a kohomologie
Potrubí M je orientovatelný právě tehdy, když je první Třída Stiefel – Whitney zmizí. Zejména pokud je první kohomologická skupina s Z/ 2 koeficienty je nula, pak je potrubí rozdělovatelné. Navíc pokud M je orientovatelný a w1 zmizí parametrizuje výběr orientací.[5] Tato charakteristika orientovatelnosti se rozšiřuje na orientovatelnost obecných vektorových svazků přes M, nejen tečný svazek.


Orientační dvojitý kryt
Kolem každého bodu M existují dvě místní orientace. Intuitivně existuje způsob, jak přejít z místní orientace v bodě str na místní orientaci v blízkém bodě str′: když dva body leží ve stejném souřadnicovém grafu U → Rn, že souřadnicový graf definuje kompatibilní místní orientace na str a str′. Souboru místních orientací lze proto dát topologii a tato topologie z ní dělá rozmanité.
Přesněji řečeno Ó být souborem všech místních orientací M. Topologizovat Ó určíme podklad pro jeho topologii. Nechat U být otevřenou podmnožinou M vybral tak, že je izomorfní s Z. Předpokládejme, že α je generátor této skupiny. Pro každého str v U, existuje funkce dopředu . Kódoména této skupiny má dva generátory a k jednomu z nich mapuje α. Topologie zapnuta Ó je definován tak, že



je otevřeno.
K dispozici je kanonická mapa π: Ó → M který posílá místní orientaci na str na str. Je jasné, že každý bod M má přesně dva preimages pod π. Ve skutečnosti, π je dokonce místním homeomorfismem, protože předobrazy otevřených množin U výše uvedené jsou homeomorfní k disjunktnímu spojení dvou kopií U. Li M je tedy orientovatelný M sama o sobě je jednou z těchto otevřených sad, takže Ó je disjunktní spojení dvou kopií M. Li M je tedy neorientovatelný Ó je propojený a orientovatelný. Rozdělovač Ó se nazývá orientační dvojitý kryt.
Rozdělovače s ohraničením
Li M je potrubí s hranicí, pak orientace M je definována jako orientace jejího interiéru. Taková orientace indukuje orientaci ∂M. Ve skutečnosti předpokládejme, že orientace M je opraveno. Nechat U → Rn+ být grafem na hranici bodu M který, je-li omezen na interiér M, je ve zvoleném orientovaném atlasu. Omezení tohoto grafu na ∂M je graf ∂M. Takové grafy tvoří orientovaný atlas pro ∂M.
Když M je v každém bodě hladký str z ∂M, omezení tangenta svazku M do ∂M je izomorfní s Tstr∂M ⊕ R, kde je faktor R je popsán dovnitř směřujícím normálovým vektorem. Orientace Tstr∂M je definována podmínkou, že základem Tstr∂M je pozitivně orientovaný právě tehdy, když v kombinaci s dovnitř směřujícím normálním vektorem definuje pozitivně orientovaný základ TstrM.
Nastavitelný dvojitý kryt
Úzce související pojem využívá myšlenku pokrývající prostor. Pro připojené potrubí M vzít M∗, sada párů (X, o) kde X je bod M a Ó je orientace na X; tady předpokládáme M je buď hladký, takže můžeme zvolit orientaci v tečném prostoru v bodě, nebo použijeme singulární homologie definovat orientaci. Pak pro každou otevřenou, orientovanou podmnožinu M považujeme odpovídající sadu párů a definujeme ji jako otevřenou sadu M∗. To dává M∗ topologie a odeslání projekce (X, o) až X je pak krycí mapa 2: 1. Tento krycí prostor se nazývá orientovatelný dvojitý kryt, protože je orientovatelný. M∗ je připojen právě tehdy, když M není orientovatelný.
Dalším způsobem, jak zkonstruovat tento kryt, je rozdělit smyčky založené na základním bodě na smyčky zachovávající orientaci nebo obrácené orientace. Smyčky zachovávající orientaci generují podskupinu základní skupiny, kterou je buď celá skupina nebo index dva. V druhém případě (což znamená, že existuje cesta obrácení orientace), podskupina odpovídá připojenému dvojitému krytu; tento kryt je konstrukčně orientovatelný. V prvním případě lze jednoduše pořídit dvě kopie M, z nichž každý odpovídá jiné orientaci.
Orientace vektorových svazků
Skutečný vektorový svazek, který a priori má GL (n) strukturní skupina, je nazýván orientovatelný když strukturní skupina možná snížena na , skupina matice s pozitivním určující. Pro tečný svazek, tato redukce je vždy možná, pokud je základní rozdělovač základny orientovatelný a ve skutečnosti to poskytuje pohodlný způsob definování orientovatelnosti hladký nemovitý potrubí: hladké potrubí je definováno jako orientovatelné, pokud je tečný svazek je orientovatelný (jako vektorový svazek). Všimněte si, že jako potrubí v jeho vlastní pravý, tangenta svazek je vždy orientovatelné, dokonce i na neorientovatelné rozdělovače.

Související pojmy
Lineární algebra
Pojem orientovatelnosti je v zásadě odvozen z topologie reálného obecná lineární skupina
- konkrétně nejnižší homotopická skupina je


invertibilní transformace reálného vektorového prostoru je buď orientace zachovávající nebo orientace obrácená.
To platí nejen pro diferencovatelné potrubí, ale i pro topologické potrubí, jako prostor sebe-homotopické ekvivalence koule má také dvě připojené komponenty, které lze označit jako mapy „zachování orientace“ a „orientace zpět“.
Analogický pojem pro symetrická skupina je střídavá skupina z dokonce i obměny.
Lorentzian geometrie
v Lorentzian geometrie, existují dva druhy orientovatelnosti: prostorová orientovatelnost a časová orientovatelnost. Ty hrají roli v kauzální struktura časoprostoru.[6] V kontextu obecná relativita, a vesmírný čas rozdělovač je prostorově orientovatelný, pokud kdykoli dva pozorovatelé pravou rukou vyrazí v raketových lodích začínajících ve stejném časoprostorovém bodě a poté se znovu setkají v jiném bodě, zůstanou vůči sobě navzájem praváci. Pokud je časoprostor časově orientovatelný, pak se oba pozorovatelé vždy dohodnou na směru času v obou bodech svého setkání. Ve skutečnosti je časoprostor časově orientovatelný právě tehdy, pokud se dva pozorovatelé mohou dohodnout, které z těchto dvou setkání předcházelo tomu druhému.[7]
Formálně pseudo-ortogonální skupina O (str,q) má pár postavy: znak prostorové orientace σ+ a znak časové orientace σ−,

Jejich součin σ = σ+σ− je determinant, který dává orientační charakter. Prostorová orientace pseudo-Riemannova potrubí je označena a sekce z přidružený balíček

kde O (M) je svazek pseudoortogonálních rámců. Podobně je časová orientace část přidruženého svazku

Viz také
Reference
- ^ Munroe, Marshall Evans (1963). Moderní vícerozměrný počet. Addison-Wesley Pub. Co. str. 263.
- ^ Spivak, Michael (1965). Kalkul na rozdělovačích potrubích. HarperCollins. ISBN 978-0-8053-9021-6.
- ^ Hatcher, Allen (2001). Algebraická topologie. Cambridge University Press. ISBN 978-0521795401.
- ^ Hatcher, Allen (2001). Algebraická topologie. Cambridge University Press. ISBN 978-0521795401., Věta 3.26 (a) na str. 236
- ^ Lawson, H. Blaine; Michelsohn, Marie-Louise (1989). Geometrie točení. Princeton University Press. ISBN 0-691-08542-0., Věta 1.2 na str. 79
- ^ S.W. Hawking, G.F.R. Ellis (1973). Struktura velkého měřítka časoprostoru. Cambridge: Cambridge University Press. ISBN 0-521-20016-4.
- ^ Mark J. Hadley (2002) Orientovatelnost časoprostoru, Klasická a kvantová gravitace 19: 4565-4571 arXiv: gr-qc / 0202031v4
externí odkazy
- Orientace potrubí v atlasu potrubí.
- Orientační krytina v atlasu potrubí.
- Orientace potrubí v obecných teoriích cohomologie v atlasu potrubí.
- Článek Encyklopedie matematiky o Orientace.