Indukční motor - Induction motor


An indukční motor nebo asynchronní motor je AC elektrický motor ve kterém elektrický proud v rotor potřebné k výrobě točivého momentu se získá elektromagnetická indukce z magnetické pole z stator navíjení.[1] Indukční motor lze proto vyrobit bez elektrického připojení k rotoru.[A] Rotor indukčního motoru může být buď typ rány nebo typ veverky.
Třífázové klec veverek indukční motory jsou široce používány jako průmyslové pohony, protože jsou samočinné, spolehlivé a ekonomické. Jednofázové indukční motory se značně používají pro menší zátěže, jako jsou domácí spotřebiče, jako jsou ventilátory. Ačkoli se tradičně používají ve službě s pevnými otáčkami, indukční motory se stále častěji používají frekvenční měniče (VFD) v provozu s proměnnou rychlostí. VFD nabízejí obzvláště důležité možnosti úspory energie pro stávající a budoucí indukční motory s proměnným točivým momentem odstředivý aplikace zatížení ventilátorů, čerpadel a kompresorů. Indukční motory s kotvou nakrátko jsou velmi široce používány jak v aplikacích s pevnými otáčkami, tak s proměnnými frekvencemi.
Dějiny


V roce 1824 francouzský fyzik François Arago formuloval existenci rotující magnetická pole, nazývané Arago rotace. Ruční zapínání a vypínání spínačů to v roce 1879 předvedl Walter Baily, což byl první primitivní indukční motor.[2][3][4][5][6][7][8]
První komutátor bezfázový jednofázový střídavý indukční motor vynalezl maďarský inženýr Ottó Bláthy; k pohonu svého vynálezu použil jednofázový motor, elektroměr.[9][10]
První třífázové indukční motory bez střídavého komutátoru byly vyvinuty nezávisle společností Galileo Ferraris a Nikola Tesla, fungující model motoru, který předvedl první v roce 1885 a druhý v roce 1887. Tesla požádala Americké patenty v říjnu a listopadu 1887 a některé z těchto patentů byly uděleny v květnu 1888. V dubnu 1888 byla Královská akademie věd v Turíně zveřejnil výzkum společnosti Ferraris týkající se jeho vícefázového motoru střídavého proudu s podrobným popisem základů motorického provozu.[5][11] V květnu 1888 představil Tesla technický papír Nový systém pro střídavé motory a transformátory do Americký institut elektrotechniků (AIEE)[12][13][14][15][16] popisující tři typy motorů se čtyřmi statory a póly: jeden se čtyřpólovým rotorem tvořícím nesamozpouštění neochota motoru, další s vinutým rotorem tvořícím samočinně se spouštějící indukční motor a třetí skutečný synchronní motor s odděleně buzeným stejnosměrným napájením na vinutí rotoru.
George Westinghouse, který vyvíjel výkon střídavého proudu v té době licencoval patenty společnosti Tesla v roce 1888 a koupil možnost patentu USA na koncept indukčního motoru Ferraris.[17] Tesla byl také jeden rok zaměstnán jako konzultant. Zaměstnanec Westinghouse C. F. Scott byl přidělen na pomoc Tesle a později převzal vývoj indukčního motoru ve Westinghouse.[12][18][19][20] Neustále prosazuje třífázový vývoj, Michail Dolivo-Dobrovolskij vynalezl indukční motor s klecovým rotorem v roce 1889 a transformátor tří končetin v roce 1890.[21][22] Dále tvrdil, že Teslov motor nebyl praktický z důvodu dvoufázových pulzací, které ho přiměly vytrvat ve své třífázové práci.[23] Ačkoli Westinghouse dosáhl svého prvního praktického indukčního motoru v roce 1892 a vyvinul řadu polyfáze 60 hertz indukční motory v roce 1893, tyto časné motory Westinghouse byly dvoufázové motory s navinutými rotory do B. G. Lamme vyvinul rotor s navíjením tyče.[12]
The General Electric Company (GE) začala vyvíjet třífázové indukční motory v roce 1891.[12] V roce 1896 podepsaly General Electric a Westinghouse dohodu o křížových licencích pro konstrukci rotoru s vinutím tyče, později nazývaného rotor s kotvou nakrátko.[12] Arthur E. Kennelly byl první, kdo zdůraznil plný význam komplexní čísla (použitím j reprezentovat druhou odmocninu mínus jedna) k označení 90 ° otáčení operátor při analýze AC problémů.[24] GE Charles Proteus Steinmetz velmi vyvinutá aplikace komplexních veličin střídavého proudu včetně analytického modelu, který je nyní běžně známý jako indukční motor Steinmetzův ekvivalentní obvod.[12][25][26][27]
Vylepšení indukčních motorů plynoucí z těchto vynálezů a inovací byla taková, že 100-koňská síla indukční motor má v současné době stejné montážní rozměry jako motor o výkonu 7,5 koní v roce 1897.[12]
Princip činnosti


Jak v indukci, tak v synchronní motory, střídavé napájení dodávané do motoru stator vytváří magnetické pole který se otáčí synchronně s AC oscilacemi. Zatímco rotor synchronního motoru se otáčí stejnou rychlostí jako pole statoru, rotor indukčního motoru se otáčí o něco pomaleji než pole statoru. Magnetické pole statoru indukčního motoru se proto mění nebo rotuje vzhledem k rotoru. To indukuje protilehlý proud v rotoru indukčního motoru, ve skutečnosti sekundární vinutí motoru, když je toto zkratováno nebo uzavřeno prostřednictvím vnější impedance.[28] Rotující magnetický tok indukuje proudy ve vinutí rotoru,[29] podobným způsobem jako proudy indukované v a transformátor sekundární vinutí.
Indukované proudy ve vinutí rotoru zase vytvářejí magnetická pole v rotoru, která reagují proti statorovému poli. Směr vytvářeného magnetického pole bude takový, aby byl proti dohodě se změnou proudu ve vinutí rotoru Lenzův zákon. Příčinou indukovaného proudu ve vinutí rotoru je magnetické pole rotujícího statoru, takže aby se zabránilo změně proudů vinutí rotoru, rotor se začne otáčet ve směru magnetického pole rotujícího statoru. Rotor zrychluje, dokud velikost indukovaného proudu a točivého momentu rotoru nevyváží aplikované mechanické zatížení na rotaci rotoru. Vzhledem k tomu, že otáčení synchronní rychlostí by nemělo za následek žádný indukovaný proud rotoru, pracuje indukční motor vždy o něco pomaleji než synchronní rychlost. Rozdíl mezi „skutečnými“ a synchronními otáčkami se pohybuje od přibližně 0,5% do 5,0% u standardních indukčních motorů s designovou křivkou točivého momentu B.[30] Podstatným znakem indukčního motoru je to, že je vytvořen pouze indukcí, místo aby byl samostatně buzen jako v synchronních nebo stejnosměrných strojích nebo aby byl samomagnetizovaný jako v motory s permanentními magnety.[28]
Aby mohly být indukovány proudy rotoru, musí být rychlost fyzického rotoru nižší než rychlost rotujícího magnetického pole statoru (); jinak by se magnetické pole nepohybovalo vzhledem k vodičům rotoru a nebyly by indukovány žádné proudy. Jak rychlost rotoru klesá pod synchronní rychlost, zvyšuje se rychlost rotace magnetického pole v rotoru, což indukuje více proudu ve vinutí a vytváří větší točivý moment. Poměr mezi rychlostí otáčení magnetického pole indukovaného v rotoru a rychlostí otáčení statorového rotačního pole se nazývá „skluz“. Při zatížení rychlost klesá a prokluz se dostatečně zvyšuje, aby vytvořil dostatečný točivý moment pro zatáčení. Z tohoto důvodu jsou indukční motory někdy označovány jako „asynchronní motory“.[31]

Indukční motor lze použít jako indukční generátor, nebo jej lze odmotat a vytvořit lineární indukční motor který může přímo generovat lineární pohyb. Režim generování indukčních motorů komplikuje potřeba budit rotor, který začíná pouze zbytkovou magnetizací. V některých případech je tato zbytková magnetizace dostatečná k samočinnému buzení motoru při zatížení. Proto je nutné buď zacvaknout motor a krátkodobě jej připojit k síti pod napětím, nebo přidat kondenzátory původně nabité zbytkovým magnetismem a zajišťující požadovaný jalový výkon během provozu. Podobná je činnost indukčního motoru paralelně se synchronním motorem sloužícím jako kompenzátor účiníku. Funkce v režimu generátoru paralelně k síti je, že rychlost rotoru je vyšší než v režimu jízdy. Poté je do sítě dodávána aktivní energie.[2] Další nevýhodou generátoru indukčního motoru je to, že spotřebovává značný magnetizační proud Já0 = (20-35)%.
Synchronní rychlost
Synchronní rychlost střídavého motoru, , je rychlost otáčení magnetického pole statoru,

- ,

kde je frekvence napájení, je počet magnetických pólů a je synchronní rychlost stroje. Pro v hertz a synchronní rychlost v RPM, vzorec se stává:



Například pro čtyřpólový třífázový motor = 4 a = 1 500 RPM (pro = 50 Hz) a 1 800 ot / min (pro = 60 Hz) synchronní rychlost.

Počet magnetických pólů, , se rovná počtu skupin cívek na fázi. Chcete-li určit počet skupin cívek na fázi v 3fázovém motoru, spočítejte počet cívek, vydělte počtem fází, což je 3. Cívky se mohou rozprostírat do několika slotů v jádru statoru, takže je zdlouhavé je počítat . Pokud u 3fázového motoru počítáte celkem 12 skupin cívek, má 4 magnetické póly. U 12pólového 3fázového stroje bude 36 cívek. Počet magnetických pólů v rotoru se rovná počtu magnetických pólů ve statoru.
Dvě číslice vpravo a vlevo nad každou znázorňují dvoupólový třífázový stroj skládající se ze tří párů pólů, přičemž každý pól je od sebe vzdálený 60 °.
Uklouznutí

Uklouznutí, , je definován jako rozdíl mezi synchronními otáčkami a provozními otáčkami, při stejné frekvenci, vyjádřený v otáčkách za minutu nebo v procentech nebo poměru synchronních otáček. Tím pádem


kde je elektrická rychlost statoru, je mechanická rychlost rotoru.[34][35] Kluz, který se mění od nuly při synchronních otáčkách a 1, když se rotor zastaví, určuje točivý moment motoru. Protože zkratovaná vinutí rotoru mají malý odpor, i malý skluz indukuje velký proud v rotoru a vytváří značný točivý moment.[36] Při plném jmenovitém zatížení se skluz pohybuje od více než 5% pro malé nebo speciální motory k méně než 1% pro velké motory.[37] Tyto změny otáček mohou způsobit problémy se sdílením zátěže, když jsou mechanicky připojeny motory různých velikostí.[37] K omezení skluzu jsou k dispozici různé metody, VFD často nabízejí nejlepší řešení.[37]

Točivý moment
Standardní točivý moment



Typický vztah otáček a točivého momentu standardního vícefázového indukčního motoru NEMA Design B je uveden na křivce vpravo. Motory Design B jsou vhodné pro většinu zátěží s nízkým výkonem, jako jsou odstředivá čerpadla a ventilátory, omezeny následujícími typickými rozsahy točivého momentu:[30][b]
- Průrazný moment (špičkový točivý moment), 175–300% jmenovitého točivého momentu
- Moment s blokovaným rotorem (točivý moment při 100% skluzu), 75–275% jmenovitého točivého momentu
- Utahovací moment, 65–190% jmenovitého momentu.
V normálním rozsahu zatížení motoru je strmost točivého momentu přibližně lineární nebo úměrná skluzu, protože hodnota odporu rotoru dělená skluzem, , lineárně dominuje točivému momentu.[38] Jak se zatížení zvyšuje nad jmenovité zatížení, faktory reaktance úniku statoru a rotoru se postupně stávají významnějšími ve vztahu k tak, že točivý moment se postupně křiví směrem k průraznému momentu. Jak se zátěžový moment zvyšuje nad točivý moment, motor se zastaví.

Začíná
Existují tři základní typy malých indukčních motorů: jednofázové s dělenými fázemi, jednofázové se stíněnými póly a vícefázové.
U dvoupólových jednofázových motorů se točivý moment snižuje na nulu při 100% skluzu (nulové rychlosti), takže tyto vyžadují úpravy statoru, například stínované póly poskytnout počáteční točivý moment. Jednofázový indukční motor vyžaduje samostatné spouštěcí obvody, aby motoru poskytoval rotační pole. Normální běžící vinutí v takovém jednofázovém motoru mohou způsobit otáčení rotoru v obou směrech, takže spouštěcí obvod určuje směr provozu.

U některých menších jednofázových motorů se spouštění provádí pomocí měděného drátu otočeného kolem části pólu; takový pól se označuje jako stínovaný pól. Proud indukovaný v tomto směru zaostává za napájecím proudem a vytváří zpožděné magnetické pole kolem zastíněné části pólové plochy. To dodává dostatečnou energii rotačního pole k nastartování motoru. Tyto motory se obvykle používají v aplikacích, jako jsou stolní ventilátory a gramofony, protože požadovaný počáteční točivý moment je nízký a nízká účinnost je tolerovatelná vzhledem ke sníženým nákladům na motor a způsob spouštění ve srovnání s jinými konstrukcemi střídavých motorů.
Větší jednofázové motory jsou dvoufázové motory a mají druhé statorové vinutí napájené proudem mimo fázi; takové proudy mohou být vytvářeny napájením vinutí kondenzátorem nebo jeho přijímáním různých hodnot indukčnosti a odporu z hlavního vinutí. v start kondenzátoru konstrukce, druhé vinutí je odpojeno, jakmile je motor na rychlost, obvykle buď odstředivým spínačem působícím na závaží na hřídeli motoru nebo termistor který se zahřívá a zvyšuje jeho odpor, čímž se snižuje proud přes druhé vinutí na zanedbatelnou úroveň. The běh kondenzátoru designy udržují druhé vinutí při běhu a zlepšují točivý moment. A start odporu design používá startér vložený do série se spouštěcím vinutím, čímž vytváří reaktanci.
Samočinně se spouštějící vícefázové indukční motory produkují točivý moment i při zastavení. Dostupné metody spouštění indukčních motorů s kotvou nakrátko zahrnují přímé spouštění on-line, spouštění reaktoru se sníženým napětím nebo autotransformátor, spouštění hvězda-trojúhelník nebo stále častěji nové polovodičové měkké sestavy a samozřejmě frekvenční měniče (VFD).[39]
Vícefázové motory mají rotorové tyče tvarované tak, aby poskytovaly různé charakteristiky rychlosti a točivého momentu. Distribuce proudu uvnitř tyčí rotoru se mění v závislosti na frekvenci indukovaného proudu. V klidovém stavu má proud rotoru stejnou frekvenci jako proud statoru a má tendenci cestovat po nejvzdálenějších částech tyčí rotoru klece (o kožní efekt ). Různé tvary pruhů mohou poskytnout užitečně odlišné charakteristiky rychlosti a točivého momentu a také určitou kontrolu nad zapínacím proudem při spuštění.
Ačkoli vícefázové motory jsou ze své podstaty samočinné, jejich konstrukční limity pro rozběhový a rozběhový moment musí být dostatečně vysoké, aby překonaly podmínky skutečného zatížení.
U vinutých rotorových motorů umožňuje připojení obvodu rotoru přes sběrací kroužky k vnějším odporům změnu charakteristik rychlosti a momentu pro účely řízení zrychlení a řízení rychlosti.
Kontrola rychlosti
Odpor

Před vývojem polovodičů výkonová elektronika Bylo obtížné měnit frekvenci a klecové indukční motory se používaly hlavně v aplikacích s pevnou rychlostí. Aplikace jako elektrické mostové jeřáby používaly stejnosměrné pohony nebo motory s vinutým rotorem (WRIM) s sběrací kroužky pro připojení obvodu rotoru k proměnlivému vnějšímu odporu umožňujícímu značný rozsah regulace otáček. Ztráty rezistoru spojené s provozem WRIM při nízké rychlosti jsou však hlavní nákladovou nevýhodou, zejména u stálých zátěží.[40] Velké motorové pohony sběracího kroužku, nazývané systémy rekuperace energie skluzu, některé se stále používají, získávají energii z obvodu rotoru, opravují ji a vracejí ji do energetického systému pomocí VFD.
Kaskáda
Rychlost dvojice motorů s kroužkem lze regulovat kaskádovým spojením nebo zřetězením. Rotor jednoho motoru je spojen se statorem druhého.[41][42] Pokud jsou oba motory také mechanicky spojeny, poběží poloviční rychlostí. Tento systém byl kdysi široce používán u třífázových železničních lokomotiv, jako např Třída FS E.333.
Frekvenční měnič

V mnoha průmyslových aplikacích s proměnnými otáčkami jsou pohony DC a WRIM přemísťovány indukčními motory s klecí napájenými VFD. Nejběžnějším účinným způsobem řízení rychlosti asynchronního motoru mnoha zátěží je použití VFD. Překážky přijetí VFD z důvodu nákladů a spolehlivosti byly za poslední tři desetiletí výrazně sníženy, takže se odhaduje, že technologie pohonu je přijata až u 30–40% všech nově instalovaných motorů.[43]
Frekvenční měniče implementují skalární nebo vektorové řízení indukčního motoru.
S skalární ovládání, pouze velikost a frekvence napájecího napětí jsou řízeny bez fázového řízení (chybí zpětná vazba podle polohy rotoru). Skalární řízení je vhodné pro aplikace, kde je zatížení konstantní.
Vektorové ovládání umožňuje nezávislé řízení otáček a točivého momentu motoru, což umožňuje udržovat konstantní rychlost otáčení při měnícím se zátěžovém momentu. Ale vektorové řízení je dražší kvůli ceně senzoru (ne vždy) a požadavku na výkonnější ovladač.[44]
Konstrukce

Stator indukčního motoru se skládá z pólů nesoucích napájecí proud k indukci magnetického pole, které proniká rotorem. Pro optimalizaci distribuce magnetického pole jsou vinutí rozložena do štěrbin kolem statoru, přičemž magnetické pole má stejný počet severního a jižního pólu. Indukční motory jsou nejčastěji provozovány na jednofázové nebo třífázové napájení, ale existují dvoufázové motory; teoreticky mohou mít indukční motory libovolný počet fází. Mnoho jednofázových motorů se dvěma vinutími lze považovat za dvoufázové motory, protože kondenzátor se používá ke generování druhé napájecí fáze o 90 ° z jednofázového napájení a přivádí ji do druhého vinutí motoru. Jednofázové motory vyžadují určitý mechanismus, který při spuštění vytváří rotující pole. Vodicí tyče rotoru klece indukčního motoru jsou obvykle zkosené, aby se zabránilo magnetickému zablokování.
Standardizované velikosti rámů motorů NEMA a IEC v celém odvětví vedou k zaměnitelným rozměrům pro montáž na hřídel, patku, obecným aspektům i určitým aspektům příruby motoru. Vzhledem k tomu, že otevřená konstrukce odolná proti kapání (ODP) umožňuje volnou výměnu vzduchu z vnějšku na vnitřní vinutí statoru, má tento styl motoru tendenci být o něco efektivnější, protože vinutí jsou chladnější. Při daném jmenovitém výkonu vyžaduje nižší rychlost větší rám.[45]
Obrácení rotace
Způsob změny směru otáčení indukčního motoru závisí na tom, zda se jedná o třífázový nebo jednofázový stroj. V případě třífázových fází je reverzace přímo implementována záměnou připojení jakýchkoli dvoufázových vodičů.
U jednofázového motoru s dělenou fází je reverzace dosaženo změnou spojení mezi primárním vinutím a spouštěcím obvodem. Některé jednofázové motory s dělenou fází, které jsou navrženy pro konkrétní aplikace, mohou mít připojení mezi primárním vinutím a spouštěcím obvodem interně připojené, takže rotaci nelze změnit. Jednofázové motory se stíněnými póly mají také pevnou rotaci a směr nelze změnit, pouze demontáží motoru a obrácením statoru opačným směrem, než je původní směr rotoru.
Faktor síly
The faktor síly indukčních motorů se mění podle zatížení, obvykle od přibližně 0,85 nebo 0,90 při plném zatížení až po pouhých 0,20 při volnoběhu,[39] kvůli úniku statoru a rotoru a magnetizační reaktanci.[46] Účiník lze zlepšit připojením kondenzátorů buď na základě jednotlivých motorů, nebo přednostně na společnou sběrnici pokrývající několik motorů. Z ekonomických a jiných důvodů jsou energetické systémy zřídka upraveny účinníkem na účiník jednoty.[47]Aplikace výkonových kondenzátorů s harmonickými proudy vyžaduje analýzu energetického systému, aby se zabránilo harmonické rezonanci mezi kondenzátory a reaktancemi transformátoru a obvodu.[48] Doporučuje se společná korekce účiníku sběrnice, aby se minimalizovalo rezonanční riziko a zjednodušila se analýza systému napájení.[48]
Účinnost

Účinnost motoru při plném zatížení se pohybuje kolem 85–97%, související ztráty motoru se dělí zhruba takto:[49]
- Tření a vítr, 5–15%
- Železo nebo ztráty jádra, 15–25%
- Ztráty statoru, 25–40%
- Ztráty rotoru, 15–25%
- Ztráty rozptýleného zatížení, 10–20%.
Různé regulační orgány v mnoha zemích zavedly a provedly právní předpisy na podporu výroby a používání vysoce účinných elektrických motorů. Existují a chystají se právní předpisy týkající se budoucího povinného používání indukčních motorů prémiové účinnosti v definovaném zařízení. Další informace viz: Prémiová účinnost.
Steinmetzův ekvivalentní obvod
Mnoho užitečných motorických vztahů mezi časem, proudem, napětím, rychlostí, účinníkem a točivým momentem lze získat z analýzy Steinmetz ekvivalentní obvod (nazývaný také ekvivalentní obvod T nebo ekvivalentní obvod doporučený IEEE), matematický model používaný k popisu toho, jak je elektrický vstup indukčního motoru transformován na užitečný výstup mechanické energie. Ekvivalentní obvod je jednofázové znázornění vícefázového indukčního motoru, které je platné v ustáleném stavu s vyváženým zatížením.
Steinmetzův ekvivalentní obvod je vyjádřen jednoduše z hlediska následujících komponent:
- Stator odpor a úniková reaktance (, ).
- Rotor odpor, reaktance úniku a prokluz (, nebo , , a ).
- Magnetizující reaktance ().







Parafrázováno z Algeru ve Knowltonu, indukční motor je jednoduše elektrický transformátor, jehož magnetický obvod je oddělen vzduchovou mezerou mezi vinutím statoru a vinutím rotujícího rotoru.[28] Ekvivalentní obvod může být odpovídajícím způsobem zobrazen buď s ekvivalentními součástmi obvodu příslušných vinutí oddělených ideálním transformátorem, nebo s komponentami rotoru označenými na straně statoru, jak je znázorněno v následujícím obvodu a souvisejících tabulkách rovnic a definic parametrů.[39][47][50][51][52][53]

| Definice parametrů obvodu | ||
|---|---|---|
| Jednotky | ||
| stator frekvence zdroje | Hz | |
| stator synchronní frekvence | Hz | |
| rotor rychlost dovnitř otáčky za minutu | ot / min | |
| synchronní rychlost v otáčkách za minutu | ot / min | |
| stator nebo primární proud | A | |
| rotor nebo sekundární proud na straně statoru | A | |
| magnetizační proud | A | |
| imaginární číslo nebo 90 ° otáčení, operátor | ||
| Thévenin činitel reaktance | ||
| počet fází motoru | ||
| počet pólů motoru | ||
| elektromechanický výkon | W nebo hp | |
| síla vzduchové mezery | Ž | |
| rotor ztráty mědi | Ž | |
| příkon | Ž | |
| ztráta jádra | Ž | |
| tření a ztráta větru | Ž | |
| příkon běžícího světla | Ž | |
| ztráta rozptýleného zatížení | Ž | |
| stator nebo primární odpor a úniková reaktance | Ω | |
| rotor nebo sekundární odpor a úniková reaktance vztažená na stranu statoru | Ω | |
| odpor a úniková reaktance na vstupu motoru | Ω | |
| Kombinace ekvivalentního odporu a únikové reaktance Thévenin a | Ω | |
| uklouznutí | ||
| elektromagnetický točivý moment | Nm nebo ft-lb | |
| točivý moment | Nm nebo ft-lb | |
| dojemná fáze statoru Napětí | PROTI | |
| magnetizující reaktance | Ω | |
| Ω | ||
| stator nebo primární impedance | Ω | |
| rotor nebo sekundární impedance vztažená na primární | Ω | |
| impedance na statoru motoru nebo primárním vstupu | Ω | |
| kombinovaný rotor nebo sekundární a magnetizační impedance | Ω | |
| Théveninova ekvivalentní obvodová impedance, | Ω | |
| rychlost rotoru | rad / s | |
| synchronní rychlost | rad / s | |
| mho | ||
| Ω | ||








































Pro obvod platí následující přibližné pravidla:[53][54][55]
- Maximální proud nastává za podmínek zablokovaného proudu rotoru (LRC) a je o něco menší než , s LRC obvykle v rozmezí 6 až 7násobku jmenovitého proudu pro standardní motory Design B.[30]
- Průrazný moment se stane, když a takhle a tedy při vstupu s konstantním napětím je procento točivého momentu minimálního skluzu indukčního motoru přibližně o polovinu nižší než procento LRC.
- Relativní reaktance statoru k úniku rotoru standardních indukčních motorů klece Design B je[56]
- .
- Zanedbáním statorového odporu se křivka točivého momentu indukčního motoru snižuje na Klossovu rovnici[57]
- , kde je sklouznout .







| Základní elektrické rovnice | ||
|---|---|---|
Vstupní ekvivalentní impedance motoru Statorový proud Proud rotoru odkazoval na stranu statoru z hlediska proudu statoru | ||




| Mocenské rovnice | ||
|---|---|---|
Z ekvivalentního obvodu Steinmetz máme To znamená, že výkon vzduchové mezery se rovná elektromechanickému výkonu plus ztráty mědi rotoru Vyjadřování elektromechanického výkonu z hlediska rychlosti rotoru
Vyjadřování v ft-lb:
| ||





| Rovnice točivého momentu | ||
|---|---|---|
Aby bylo možné vyjádřit přímo z hlediska , IEEE to doporučuje a být převedeny na Thévenin ekvivalentní obvod 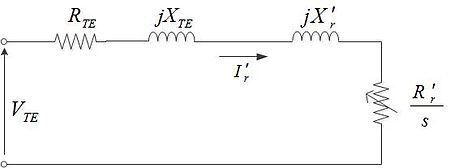 IEEE doporučil ekvivalentní obvod Thévenin kde Od té doby a a nechat Pro nízké hodnoty skluzu:
Pro vysoké hodnoty skluzu
Pro maximální točivý moment nebo moment při poruše, který je nezávislý na odporu rotoru
Odpovídající skluz při maximálním nebo průrazném momentu je V jednotkách stopa-libra
| ||


















Lineární indukční motor
Lineární indukční motory, které pracují na stejných obecných principech jako rotační indukční motory (často třífázové), jsou navrženy tak, aby vytvářely přímočarý pohyb. Použití zahrnuje magnetická levitace, lineární pohon, lineární aktuátory, a tekutý kov čerpací.[58]
Viz také
Poznámky
- ^ To znamená, že vyžaduje elektrické připojení mechanická komutace, samostatné buzení nebo vlastní buzení pro celou energii nebo její část přenášenou ze statoru na rotor, jak je uvedeno v univerzální, DC a synchronní motory.
- ^ NEMA MG-1 definuje a) poruchový moment jako maximální točivý moment vyvinutý motorem se jmenovitým napětím při jmenovité frekvenci bez náhlého poklesu otáček, b) točivý moment zablokovaného rotoru jako minimální točivý moment vyvinutý motorem v klidu se jmenovitým napětím aplikovaný při jmenovité frekvenci, a c) roztahovací moment jako minimální točivý moment vyvinutý motorem během doby zrychlení z klidu na rychlost, při které dojde k rozbití točivého momentu.
Reference
- ^ IEC 60050 (datum vydání: 1990-10). Oddíl 411-31: Rotační stroje - obecně, IEV ref. 411-31-10: "Indukční stroj- asynchronní stroj, z něhož je napájeno pouze jedno vinutí ".
- ^ A b Babbage, C .; Herschel, J. F. W. (leden 1825). „Zpráva o opakování experimentů M. Araga o magnetismu projeveném různými látkami během aktu rotace“. Filozofické transakce královské společnosti. 115: 467–496. Bibcode:1825RSPT..115..467B. doi:10.1098 / rstl.1825.0023. Citováno 2. prosince 2012.
- ^ Thompson, Silvanus Phillips (1895). Vícefázové elektrické proudy a motory na střídavý proud (1. vyd.). Londýn: E. & F.N. Spon. str. 261. Citováno 2. prosince 2012.
- ^ Baily, Walter (28. června 1879). „Způsob výroby Arago's Rotation“. Filozofický časopis. Taylor & Francis. 3 (1): 115–120. Bibcode:1879 PPSL .... 3..115B. doi:10.1088/1478-7814/3/1/318.
- ^ A b Vučković, Vladan (listopad 2006). „Interpretace objevu“ (PDF). Srbský žurnál elektrotechniků. 3 (2). Citováno 10. února 2013.
- ^ Elektrotechnik, svazek 5. (únor 1890)
- ^ The Electrician, svazek 50. 1923
- ^ Úřední věstník Patentového úřadu Spojených států: Svazek 50. (1890)
- ^ Eugenii Katz. "Blathy". People.clarkson.edu. Archivovány od originál dne 25. června 2008. Citováno 2009-08-04.
- ^ Ricks, G.W.D. (Březen 1896). „Měřiče dodávky elektřiny“. Journal of the Institution of Electrical Engineers. 25 (120): 57–77. doi:10.1049 / jiee-1.1896.0005.
- ^ Ferraris, G. (1888). „Atti della Reale Academia delle Science di Torino“. Atti della R. Academia delle Science di Torino. XXIII: 360–375.
- ^ A b C d E F G Alger, P.L .; Arnold, R.E. (1976). „Historie indukčních motorů v Americe“. Sborník IEEE. 64 (9): 1380–1383. doi:10.1109 / PROC.1976.10329. S2CID 42191157.
- ^ Froehlich, Fritz E. šéfredaktor; Allen Kent Spolueditor (1992). The Froehlich/Kent Encyclopedia of Telecommunications: Volume 17 - Television Technology to Wire Antennas (První vydání). New York: Marcel Dekker, Inc. str. 36. ISBN 978-0-8247-2902-8.
- ^ The Electrical Engineer (21 Sep 1888). . . . a new application of the alternating current in the production of rotary motion was made known almost simultaneously by two experimenters, Nikola Tesla and Galileo Ferraris, and the subject has attracted general attention from the fact that no commutator or connection of any kind with the armature was required. . . . Svazek II. London: Charles & Co. p. 239.
- ^ Ferraris, Galileo (1885). "Electromagnetic Rotation with an Alternating Current". Elektrikář. 36: 360–375.
- ^ Tesla, Nikola; AIEE Trans. (1888). "A New System for Alternating Current Motors and Transformers". AIEE. 5: 308–324. Citováno 17. prosince 2012.
- ^ Jill Jonnes, Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the World, Edison Declares War
- ^ Electrical World, Volume 78, No 7. page 340
- ^ Klooster, John W. (30 July 2009). Icons of Invention the Makers of the Modern World from Gutenberg to Gates. Santa Barbara: ABC-CLIO. str. 305. ISBN 978-0-313-34744-3. Citováno 10. září 2012.
- ^ Day, Lance (1996). McNeil, Ian (ed.). Biografický slovník dějin technologie. Londýn: Routledge. str. 1204. ISBN 978-0-203-02829-2. Citováno 2. prosince 2012.
- ^ Hubbell, M.W. (2011). The Fundamentals of Nuclear Power Generation Questions & Answers. Autorský dům. str. 27. ISBN 978-1463424411.
- ^ VDE Committee History of Electrical Engineering IEEE German Chapter (January 2012). "150th Birthday of Michael von Dolivo-Dobrowolsky Colloquium". 13. Archivovány od originál dne 25. února 2013. Citováno 10. února 2013. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Dolivo-Dobrowolsky, M. (1891). ETZ. 12: 149, 161. Chybějící nebo prázdný
| název =(Pomoc) - ^ Kennelly, Arthur E. (Jan 1893). "Impedance". Transakce amerického institutu elektrotechniků. X: 172–232. doi:10.1109/T-AIEE.1893.4768008.
- ^ Steinmetz, Charles Porteus (1897). "The Alternating Current Induction Motor". AIEE Trans. XIV (1): 183–217. doi:10.1109/T-AIEE.1897.5570186. S2CID 51652760.
- ^ Banihaschemi, Abdolmajid (1973). Determination of the Losses in Induction Machines Due to Harmonics (PDF). Fredericton, N.B.: University of New Brunswick. pp. 1, 5–8. Archivovány od originál (PDF) dne 04.07.2013.
- ^ Steinmetz, Charles Proteus; Berg, Ernst J. (1897). Theory and Calculation of Alternating Current Phenomena. Nakladatelská společnost McGraw. OL 7218906M.
- ^ A b C Alger, Philip L.; et al. (1949). "'Induction Machines' sub-section of Sec. 7 - Alternating-Current Generators and Motors". In Knowlton, A.E. (ed.). Standardní příručka pro elektrotechniky (8. vydání). McGraw-Hill. str. 705.
- ^ "AC Motors". NSW HSC Online - Charles Sturt University. Archivovány od originál dne 30. října 2012. Citováno 2. prosince 2012.
- ^ A b C NEMA MG-1 2007 Condensed (2008). Information Guide for General Purpose Industrial AC Small and Medium Squirrel-Cage Induction Motor Standards. Rosslyn, Virginia US: NEMA. str. 29 (Table 11). Citováno 2. prosince 2012.
- ^ "Induction (Asynchronous) Motors" (PDF). Mississippi State University Dept of Electrical and Computer Engineering, Course ECE 3183, 'Electrical Engineering Systems for non-ECE majors'. Archivovány od originál (PDF) dne 15. května 2016. Citováno 2. prosince 2012.
- ^ "Induction Motors". electricmotors.machinedesign.com. Penton Media, Inc. Archivovány od originál dne 16. 11. 2007. Citováno 2016-04-12.
- ^ "Motor Formulas". elec-toolbox.com. Archivovány od originál dne 8. května 1999. Citováno 1. ledna 2013.
- ^ Srivastava, Avinash; Kumar, Ravi. "Torque Slip Characteristics of Induction Motor". Poznámky k kurzu. Malnad College Of Engineering.
- ^ NEMA Standards Publication (2007). Application Guide for AC Adjustable Speed Drive Systems. Rosslyn, Virginia US: NEMA. str. 6. Archivováno od originál dne 28. dubna 2008. Citováno 2. prosince 2012.
- ^ Herman, Stephen L. (2011). Alternating Current Fundamentals (8. vydání). USA: Cengage Learning. 529–536. ISBN 978-1-111-03913-4.
- ^ A b C Peltola, Mauri. "AC Induction Motor Slip". Plantservices.com. Citováno 18. prosince 2012.
- ^ Keljik, Jeffrey (2009). "Chapter 12 - The Three-Phase, Squirrel-Cage Induction Motor". Electricity 4 : AC/DC Motors, Controls, and Maintenance (9. vydání). Clifton Park, NY: Delmar, Cengage Learning. str. 112–115. ISBN 978-1-4354-0031-3.
- ^ A b C Liang, Xiaodong; Ilochonwu, Obinna (Jan 2011). "Induction Motor Starting in Practical Industrial Applications". Transakce IEEE na průmyslové aplikace. 47 (1): 271–280. doi:10.1109/TIA.2010.2090848. S2CID 18982431.
- ^ Jamil Asghar, M.S. (2003). "Speed control of wound rotor induction motors by AC regulator based optimum voltage control". Power Electronics and Drive Systems, 2003. The Fifth International Conference on. 2: 1037–1040. doi:10.1109/PEDS.2003.1283113. ISBN 978-0-7803-7885-8. S2CID 113603428.
- ^ "Cascade control". Your Electrical Home. Citováno 22. února 2018.
- ^ "Cascade control". BrainKart. Citováno 22. února 2018.
- ^ Lendenmann, Heinz; et al. "Motoring Ahead" (PDF). Citováno 18. dubna 2012.[trvalý mrtvý odkaz ]
- ^ "Three phase induction motor working principle".
- ^ ABB Group (Baldor Electric Company) (2016). "SPECIFIER GUIDE" (PDF). str. 6. Citováno 4. října 2016.
- ^ Fink, D.G.; Beaty, H.W. (1978). Standardní příručka pro elektrotechniky (11. vydání). McGraw-Hill. pp. 20–28 thru 20–29.
- ^ A b Jordan, Howard E. (1994). Energy-Efficient Electric Motors and their Applications (2. vyd.). New York: Plenum Press. ISBN 978-0-306-44698-6.
- ^ A b NEMA MG-1, p. 19
- ^ U.S. DOE (2008). "Improving Motor and Drive System Performance: A Sourcebook for Industry" (PDF). str. 27. Citováno 31. prosince 2012.
- ^ Hubert, Charles I. (2002). Electric Machines : Theory, Operation, Applications, Adjustment, and Control (2. vyd.). Upper Saddle River, N.J .: Prentice Hall. str. Kapitola 4. ISBN 978-0130612106.
- ^ Beaty, H. Wayne (Ed.) (2006). "Section 5 - Three-Phase Induction Motors by Hashem Oraee" (PDF). Handbook of Electric Power Calculations (3. vyd.). New York: McGraw-Hill. ISBN 0-07-136298-3. Archivovány od originál (PDF) dne 13. 8. 2012.CS1 maint: další text: seznam autorů (odkaz)
- ^ Knight, Andy. "Three-Phase Induction Machines". Hosted by University of Alberta. Archivovány od originál dne 15. ledna 2013. Citováno 21. prosince 2012.
- ^ A b IEEE 112 (2004). IEEE Standard Test Procedure for Polyphase Induction Motors and Generators. New York, N.Y.: IEEE. ISBN 978-0-7381-3978-4.
- ^ Alger (1949), p. 711
- ^ A b C d E Özyurt, Ç.H. (2005). Parameter and Speed Estimation of Induction Motors from Manufacturers Data and Measurements (PDF). Technická univerzita na Středním východě. 33–34.
- ^ Knight, Andy. "Determining Induction Machine Parameters". Hosted by University of Alberta. Archivovány od originál dne 29. listopadu 2012. Citováno 31. prosince 2012.
- ^ Hameyer, Kay (2001). "Electrical Machine I: Basics, Design, Function, Operation" (PDF). RWTH Aachen University Institute of Electrical Machines. Archivovány od originál (PDF) dne 10. února 2013. Citováno 11. ledna 2013.page=133
- ^ Bulletin atomových vědců. Educational Foundation for Atomic Science. 6. června 1973. Citováno 8. srpna 2012.
Klasické zdroje
- Bailey, Benjamin Franklin (1911). The Induction Motor. McGraw-Hill.
induction motor.
- Behrend, Bernhard Arthur (1901). The Induction Motor: A Short Treatise on its Theory and Design, With Numerous Experimental Data and Diagrams. McGraw Publishing Company / Electrical World and Engineer.
- Boy de la Tour, Henri (1906). The Induction Motor: Its Theory and Design, Set Forth By a Practical Method of Calculation. Translated Cyprien Odilon Mailloux. McGraw Pub. Co.
externí odkazy
- Silvanus Phillips Thompson: Polyphase electric currents and alternate current motors
- Induction motor topics from Hyperphysics website hosted by C.R. Nave, GSU Physics and Astronomy Dept.
