Motor inchworm - Inchworm motor
tento článek ne uvést žádný Zdroje. (Březen 2018) (Zjistěte, jak a kdy odstranit tuto zprávu šablony) |
Bylo navrženo, aby tento článek byl sloučeny do Piezoelektrický motor. (Diskutujte) Navrhováno od srpna 2020. |
The palcový motor je zařízení, které používá piezoelektrický pohony přesunout hřídel pomocí nanometr přesnost.
Ve své nejjednodušší formě používá palcový šnekový motor tři piezoelektrické pohony (2 a 3, viz obrázek 1.) namontované uvnitř trubky (1) a elektrifikované v pořadí pro uchopení hřídele (4), který se poté pohybuje v lineárním směru. Pohyb hřídele je způsoben prodloužením bočního piezo (2) tlačením na dva svírací piezos (3).
Úkon
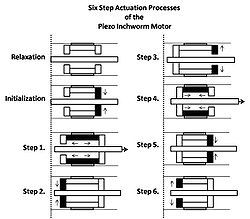
Proces ovládání motoru palcového šneku je šestikrokový cyklický proces po počáteční fázi relaxace a inicializace. Zpočátku jsou všechny tři piezos uvolněné a neroztažené. K inicializaci motoru s palcovými šneky je nejdříve elektrifikován spojkový piezo nejblíže ke směru požadovaného pohybu (který se pak stává piezoelektrickým spojkou vpřed), poté začíná šestistupňový cyklus následujícím způsobem (viz obrázek 2.):
Krok 1. Prodloužení bočního piezo.
Krok 2. Prodloužení piezo spojky na zádi.
Krok 3. Uvolnění piezoelektrické spojky dopředu.
Krok 4. Uvolnění bočního piezo.
Krok 5. Prodloužení piezoelektrické spojky.
Krok 6. Uvolnění piezo zadní spojky.
Elektrifikace piezoelektrických akčních členů se provádí aplikací vysokého předpětí na akční členy v kroku podle výše popsaného "šestistupňového" procesu. Pro přesun na dlouhé vzdálenosti se řada šesti kroků opakuje mnohokrát v rychlém sledu. Jakmile se motor dostatečně přiblíží do požadované konečné polohy, může být motor přepnut do volitelného režimu jemného polohování. V tomto režimu spojky dostávají konstantní napětí (jedno vysoké a druhé nízké) a boční piezoelektrické napětí je poté upraveno na střední hodnotu, za stálého zpětnovazebního řízení, aby se dosáhlo požadované konečné polohy.
Použití
Skenovací tunelová mikroskopie
Motor palceworm se běžně používá v skenování tunelovacích mikroskopů (STM). STM vyžaduje kontrolu nanometrické stupnice svého skenovacího hrotu poblíž materiálu, který pozoruje. Této kontroly lze dosáhnout připojením skenovacího hrotu k hřídeli motoru palcového šneku. Motor inchworm zase umožňuje ovládání ve směru kolmém k rovině povrchu pozorovaného materiálu. Pohyb po povrchu se běžně označuje jako pohyb v rovině x-y, zatímco pohyb kolmý k povrchu se běžně označuje jako pohyb ve směru z. Pohyb snímací špičky motorem palcového šneku je ovládán ručně nebo automaticky ovládáním připojením motoru k a zpětná vazba Systém.
Patch upínání
Palivový motor lze použít v upnutí záplaty biologických buněk. Tato technika se nejčastěji provádí optickým mikroskopem a mikromanipulátor drží skleněnou pipetu. Palcový motor je zvláště vhodný pro upínání patchů, protože poskytuje operátorovi prakticky okamžitý, přesný, plynulý a předvídatelný pohyb bez driftu.