Ohýbání kruhové desky upnuté na hraně působením příčného tlaku. Levá polovina desky ukazuje deformovaný tvar, zatímco pravá polovina ukazuje nedeformovaný tvar. Tento výpočet byl proveden pomocí
Ansys .
Ohýbání desek nebo ohýbání desky , Odkazuje na výchylka a talíř kolmo na rovinu desky působením vnějšího síly a momenty . Velikost výchylky lze určit řešením diferenciálních rovnic příslušného teorie desek . The zdůrazňuje z desky lze vypočítat z těchto průhybů. Jakmile jsou napětí známa, teorie selhání lze použít k určení, zda deska při daném zatížení selže.
Ohýbání desek Kirchhoff-Love Síly a momenty na ploché desce.
Definice Pro tenkou obdélníkovou desku o tloušťce H { displaystyle H} Youngův modul E { displaystyle E} Poissonův poměr ν { displaystyle nu} w { displaystyle w}
The ohybová tuhost je dána
D = E H 3 12 ( 1 − ν 2 ) { displaystyle D = { frac {EH ^ {3}} {12 vlevo (1- nu ^ {2} vpravo)}}} Okamžiky The ohybové momenty na jednotku délky jsou dány vztahem
M X = − D ( ∂ 2 w ∂ X 2 + ν ∂ 2 w ∂ y 2 ) { displaystyle M_ {x} = - D left ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + nu { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} M y = − D ( ν ∂ 2 w ∂ X 2 + ∂ 2 w ∂ y 2 ) { displaystyle M_ {y} = - D left ( nu { frac { částečné ^ {2} w} { částečné x ^ {2}}} + { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} The kroutící moment na jednotku délky je dáno
M X y = − D ( 1 − ν ) ∂ 2 w ∂ X ∂ y { displaystyle M_ {xy} = - D levý (1- nu pravý) { frac { částečný ^ {2} w} { částečný x částečný y}}} Síly The smykové síly na jednotku délky jsou dány vztahem
Q X = − D ∂ ∂ X ( ∂ 2 w ∂ X 2 + ∂ 2 w ∂ y 2 ) { displaystyle Q_ {x} = - D { frac { částečné} { částečné x}} vlevo ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} Q y = − D ∂ ∂ y ( ∂ 2 w ∂ X 2 + ∂ 2 w ∂ y 2 ) { displaystyle Q_ {y} = - D { frac { částečné} { částečné y}} vlevo ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} Zdůrazňuje Ohýbání zdůrazňuje jsou dány
σ X = − 12 D z H 3 ( ∂ 2 w ∂ X 2 + ν ∂ 2 w ∂ y 2 ) { displaystyle sigma _ {x} = - { frac {12Dz} {H ^ {3}}} vlevo ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + nu { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} σ y = − 12 D z H 3 ( ν ∂ 2 w ∂ X 2 + ∂ 2 w ∂ y 2 ) { displaystyle sigma _ {y} = - { frac {12Dz} {H ^ {3}}} vlevo ( nu { frac { částečné ^ {2} w} { částečné x ^ {2} }} + { frac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo)} The smykové napětí je dána
τ X y = − 12 D z H 3 ( 1 − ν ) ∂ 2 w ∂ X ∂ y { displaystyle tau _ {xy} = - { frac {12Dz} {H ^ {3}}} levý (1- nu pravý) { frac { částečný ^ {2} w} { částečný x částečné y}}} Kmeny The napětí v ohybu pro teorii malého vychýlení jsou dány vztahem
ϵ X = ∂ u ∂ X = − z ∂ 2 w ∂ X 2 { displaystyle epsilon _ {x} = { frac { částečné u} { částečné x}} = - z { frac { částečné ^ {2} w} { částečné x ^ {2}}}} ϵ y = ∂ proti ∂ y = − z ∂ 2 w ∂ y 2 { displaystyle epsilon _ {y} = { frac { částečné v} { částečné y}} = - z { frac { částečné ^ {2} w} { částečné y ^ {2}}}} The smykové napětí pro teorii malého průhybu je dána vztahem
y X y = ∂ u ∂ y + ∂ proti ∂ X = − 2 z ∂ 2 w ∂ X ∂ y { displaystyle gamma _ {xy} = { frac { částečné u} { částečné y}} + { frac { částečné v} { částečné x}} = - 2z { frac { částečné ^ { 2} w} { částečné x částečné y}}} Pro teorii desek s velkou výchylkou uvažujeme zahrnutí kmenů membrán
ϵ X = ∂ u ∂ X + 1 2 ( ∂ w ∂ X ) 2 { displaystyle epsilon _ {x} = { frac { částečné u} { částečné x}} + { frac {1} {2}} vlevo ({ frac { částečné w} { částečné x }} vpravo) ^ {2}} ϵ y = ∂ proti ∂ y + 1 2 ( ∂ w ∂ y ) 2 { displaystyle epsilon _ {y} = { frac { částečné v} { částečné y}} + { frac {1} {2}} vlevo ({ frac { částečné w} { částečné y }} vpravo) ^ {2}} y X y = ∂ u ∂ y + ∂ proti ∂ X + ∂ w ∂ X ∂ w ∂ y { displaystyle gamma _ {xy} = { frac { částečné u} { částečné y}} + { frac { částečné v} { částečné x}} + { frac { částečné w} { částečné x}} { frac { částečné w} { částečné y}}} Průhyby The výchylky jsou dány
u = − z ∂ w ∂ X { displaystyle u = -z { frac { částečné w} { částečné x}}} proti = − z ∂ w ∂ y { displaystyle v = -z { frac { částečné w} { částečné y}}} Derivace V Teorie Kirchhoff – Love plate pro desky jsou řídící rovnice[1]
N α β , α = 0 { displaystyle N _ { alpha beta, alpha} = 0} a
M α β , α β − q = 0 { displaystyle M _ { alpha beta, alpha beta} -q = 0} V rozšířené formě
∂ N 11 ∂ X 1 + ∂ N 21 ∂ X 2 = 0 ; ∂ N 12 ∂ X 1 + ∂ N 22 ∂ X 2 = 0 { displaystyle { cfrac { částečné N_ {11}} { částečné x_ {1}}} + { cfrac { částečné N_ {21}} { částečné x_ {2}}} = 0 ~; ~~ { cfrac { částečné N_ {12}} { částečné x_ {1}}} + { cfrac { částečné N_ {22}} { částečné x_ {2}}} = 0} a
∂ 2 M 11 ∂ X 1 2 + 2 ∂ 2 M 12 ∂ X 1 ∂ X 2 + ∂ 2 M 22 ∂ X 2 2 = q { displaystyle { cfrac { částečné ^ {2} M_ {11}} { částečné x_ {1} ^ {2}}} + 2 { cfrac { částečné ^ {2} M_ {12}} { částečné x_ {1} částečné x_ {2}}} + { cfrac { částečné ^ {2} M_ {22}} { částečné x_ {2} ^ {2}}} = q} kde q ( X ) { displaystyle q (x)} zatížení na jednotku plochy je tloušťka desky H = 2 h { displaystyle H = 2h} σ i j { displaystyle sigma _ {ij}}
N α β := ∫ − h h σ α β d X 3 ; M α β := ∫ − h h X 3 σ α β d X 3 . { displaystyle N _ { alpha beta}: = int _ {- h} ^ {h} sigma _ { alpha beta} ~ dx_ {3} ~; ~~ M _ { alpha beta}: = int _ {- h} ^ {h} x_ {3} ~ sigma _ { alpha beta} ~ dx_ {3} ~.} Množství N { displaystyle N} platnost na jednotku délky. Množství M { displaystyle M} okamžik na jednotku délky.
Pro izotropní , homogenní , talíře s Youngův modul E { displaystyle E} Poissonův poměr ν { displaystyle nu} [2]
∇ 2 ∇ 2 w = − q D ; D := 2 h 3 E 3 ( 1 − ν 2 ) = H 3 E 12 ( 1 − ν 2 ) { displaystyle nabla ^ {2} nabla ^ {2} w = - { cfrac {q} {D}} ~; ~~ D: = { cfrac {2h ^ {3} E} {3 (1 - nu ^ {2})}} = { cfrac {H ^ {3} E} {12 (1- nu ^ {2})}}} kde w ( X 1 , X 2 ) { displaystyle w (x_ {1}, x_ {2})}
Malý průhyb tenkých obdélníkových desek To se řídí Germain -Lagrange desková rovnice
∂ 4 w ∂ X 4 + 2 ∂ 4 w ∂ X 2 ∂ y 2 + ∂ 4 w ∂ y 4 = q D { displaystyle { cfrac { částečné ^ {4} w} { částečné x ^ {4}}} + 2 { cfrac { částečné ^ {4} w} { částečné x ^ {2} částečné y ^ {2}}} + { cfrac { částečné ^ {4} w} { částečné y ^ {4}}} = { cfrac {q} {D}}} Tato rovnice byla poprvé odvozena Lagrangeem v prosinci 1811 při opravě práce Germaina, který poskytl základ teorie.
Velký průhyb tenkých obdélníkových desek To se řídí Föppl –von Kármán deskové rovnice
∂ 4 F ∂ X 4 + 2 ∂ 4 F ∂ X 2 ∂ y 2 + ∂ 4 F ∂ y 4 = E [ ( ∂ 2 w ∂ X ∂ y ) 2 − ∂ 2 w ∂ X 2 ∂ 2 w ∂ y 2 ] { displaystyle { cfrac { částečné ^ {4} F} { částečné x ^ {4}}} + 2 { cfrac { částečné ^ {4} F} { částečné x ^ {2} částečné y ^ {2}}} + { cfrac { částečné ^ {4} F} { částečné y ^ {4}}} = E vlevo [ vlevo ({ cfrac { částečné ^ {2} w} { částečné x částečné y}} pravé) ^ {2} - { cfrac { částečné ^ {2} w} { částečné x ^ {2}}} { cfrac { částečné ^ {2} w} { částečné y ^ {2}}} vpravo]} ∂ 4 w ∂ X 4 + 2 ∂ 4 w ∂ X 2 ∂ y 2 + ∂ 4 w ∂ y 4 = q D + H D ( ∂ 2 F ∂ y 2 ∂ 2 w ∂ X 2 + ∂ 2 F ∂ X 2 ∂ 2 w ∂ y 2 − 2 ∂ 2 F ∂ X ∂ y ∂ 2 w ∂ X ∂ y ) { displaystyle { cfrac { částečné ^ {4} w} { částečné x ^ {4}}} + 2 { cfrac { částečné ^ {4} w} { částečné x ^ {2} částečné y ^ {2}}} + { cfrac { částečné ^ {4} w} { částečné y ^ {4}}} = { cfrac {q} {D}} + { cfrac {H} {D} } left ({ cfrac { částečné ^ {2} F} { částečné y ^ {2}}} { cfrac { částečné ^ {2} w} { částečné x ^ {2}}} + { cfrac { částečné ^ {2} F} { částečné x ^ {2}}} { cfrac { částečné ^ {2} w} { částečné y ^ {2}}} - 2 { cfrac { částečné ^ {2} F} { částečné x částečné y}} { cfrac { částečné ^ {2} w} { částečné x částečné y}} vpravo)} kde F { displaystyle F}
Kruhové desky Kirchhoff-Love Ohyb kruhových desek lze zkoumat řešením řídící rovnice s příslušnými okrajovými podmínkami. Tato řešení poprvé našel Poisson v roce 1829. Válcové souřadnice jsou pro takové problémy vhodné. Tady z { displaystyle z}
Řídící rovnice ve formě bez souřadnic je
∇ 2 ∇ 2 w = − q D . { displaystyle nabla ^ {2} nabla ^ {2} w = - { frac {q} {D}} ,.} Ve válcových souřadnicích ( r , θ , z ) { displaystyle (r, theta, z)}
∇ 2 w ≡ 1 r ∂ ∂ r ( r ∂ w ∂ r ) + 1 r 2 ∂ 2 w ∂ θ 2 + ∂ 2 w ∂ z 2 . { displaystyle nabla ^ {2} w equiv { frac {1} {r}} { frac { částečné} { částečné r}} vlevo (r { frac { částečné w} { částečné r}} vpravo) + { frac {1} {r ^ {2}}} { frac { částečné ^ {2} w} { částečné theta ^ {2}}} + { frac { částečné ^ {2} w} { částečné z ^ {2}}} ,.} U symetricky zatížených kruhových desek w = w ( r ) { displaystyle w = w (r)}
∇ 2 w ≡ 1 r d d r ( r d w d r ) . { displaystyle nabla ^ {2} w equiv { frac {1} {r}} { cfrac {d} {dr}} vlevo (r { cfrac {dw} {dr}} vpravo) ,.} Proto je řídící rovnice
1 r d d r [ r d d r { 1 r d d r ( r d w d r ) } ] = − q D . { displaystyle { frac {1} {r}} { cfrac {d} {dr}} vlevo [r { cfrac {d} {dr}} vlevo {{ frac {1} {r} } { cfrac {d} {dr}} left (r { cfrac {dw} {dr}} right) right } right] = - { frac {q} {D}} ,. } Li q { displaystyle q} D { displaystyle D}
w ( r ) = − q r 4 64 D + C 1 ln r + C 2 r 2 2 + C 3 r 2 4 ( 2 ln r − 1 ) + C 4 { displaystyle w (r) = - { frac {qr ^ {4}} {64D}} + C_ {1} ln r + { cfrac {C_ {2} r ^ {2}} {2}} + { cfrac {C_ {3} r ^ {2}} {4}} (2 ln r-1) + C_ {4}} kde C i { displaystyle C_ {i}}
ϕ ( r ) = d w d r = − q r 3 16 D + C 1 r + C 2 r + C 3 r ln r . { displaystyle phi (r) = { cfrac {dw} {dr}} = - { frac {qr ^ {3}} {16D}} + { frac {C_ {1}} {r}} + C_ {2} r + C_ {3} r ln r ,.} U kruhové desky je požadavek, aby průhyb a sklon průhybu byly konečné r = 0 { displaystyle r = 0} C 1 = 0 { displaystyle C_ {1} = 0} C 3 { displaystyle C_ {3}} r ln r { displaystyle r ln r ,} r = 0 { displaystyle r = 0}
Upnuté hrany Pro kruhovou desku se sevřenými okraji máme w ( A ) = 0 { displaystyle w (a) = 0} ϕ ( A ) = 0 { displaystyle phi (a) = 0} A { displaystyle a}
w ( r ) = − q 64 D ( A 2 − r 2 ) 2 a ϕ ( r ) = q r 16 D ( A 2 − r 2 ) . { displaystyle w (r) = - { frac {q} {64D}} (a ^ {2} -r ^ {2}) ^ {2} quad { text {a}} quad phi ( r) = { frac {qr} {16D}} (a ^ {2} -r ^ {2}) ,.} Posunutí v rovině v desce jsou
u r ( r ) = − z ϕ ( r ) a u θ ( r ) = 0 . { displaystyle u_ {r} (r) = - z phi (r) quad { text {a}} quad u _ { theta} (r) = 0 ,.} Rovinné kmeny v desce jsou
ε r r = d u r d r = − q z 16 D ( A 2 − 3 r 2 ) , ε θ θ = u r r = − q z 16 D ( A 2 − r 2 ) , ε r θ = 0 . { displaystyle varepsilon _ {rr} = { cfrac {du_ {r}} {dr}} = - { frac {qz} {16D}} (a ^ {2} -3r ^ {2}) ~, ~~ varepsilon _ { theta theta} = { frac {u_ {r}} {r}} = - { frac {qz} {16D}} (a ^ {2} -r ^ {2}) ~, ~~ varepsilon _ {r theta} = 0 ,.} Rovinná napětí v desce jsou
σ r r = E 1 − ν 2 [ ε r r + ν ε θ θ ] ; σ θ θ = E 1 − ν 2 [ ε θ θ + ν ε r r ] ; σ r θ = 0 . { displaystyle sigma _ {rr} = { frac {E} {1- nu ^ {2}}} vlevo [ varepsilon _ {rr} + nu varepsilon _ { theta theta} vpravo ] ~; ~~ sigma _ { theta theta} = { frac {E} {1- nu ^ {2}}} left [ varepsilon _ { theta theta} + nu varepsilon _ {rr} right] ~; ~~ sigma _ {r theta} = 0 ,.} Pro desku tloušťky 2 h { displaystyle 2h} D = 2 E h 3 / [ 3 ( 1 − ν 2 ) ] { displaystyle D = 2Eh ^ {3} / [3 (1- nu ^ {2})]}
σ r r = − 3 q z 32 h 3 [ ( 1 + ν ) A 2 − ( 3 + ν ) r 2 ] σ θ θ = − 3 q z 32 h 3 [ ( 1 + ν ) A 2 − ( 1 + 3 ν ) r 2 ] σ r θ = 0 . { displaystyle { begin {aligned} sigma _ {rr} & = - { frac {3qz} {32h ^ {3}}} left [(1+ nu) a ^ {2} - (3+ nu) r ^ {2} vpravo] sigma _ { theta theta} & = - { frac {3qz} {32h ^ {3}}} left [(1+ nu) a ^ {2} - (1 + 3 nu) r ^ {2} vpravo] sigma _ {r theta} & = 0 ,. End {zarovnáno}}} Výsledné momenty (ohybové momenty) jsou
M r r = − q 16 [ ( 1 + ν ) A 2 − ( 3 + ν ) r 2 ] ; M θ θ = − q 16 [ ( 1 + ν ) A 2 − ( 1 + 3 ν ) r 2 ] ; M r θ = 0 . { displaystyle M_ {rr} = - { frac {q} {16}} left [(1+ nu) a ^ {2} - (3+ nu) r ^ {2} right] ~; ~~ M _ { theta theta} = - { frac {q} {16}} left [(1+ nu) a ^ {2} - (1 + 3 nu) r ^ {2} right ] ~; ~~ M_ {r theta} = 0 ,.} Maximální radiální napětí je na z = h { displaystyle z = h} r = A { displaystyle r = a}
σ r r | z = h , r = A = 3 q A 2 16 h 2 = 3 q A 2 4 H 2 { displaystyle left. sigma _ {rr} right | _ {z = h, r = a} = { frac {3qa ^ {2}} {16h ^ {2}}} = { frac {3qa ^ {2}} {4H ^ {2}}}} kde H := 2 h { displaystyle H: = 2h}
M r r | r = A = q A 2 8 , M θ θ | r = A = ν q A 2 8 , M r r | r = 0 = M θ θ | r = 0 = − ( 1 + ν ) q A 2 16 . { displaystyle left.M_ {rr} right | _ {r = a} = { frac {qa ^ {2}} {8}} ~, ~~ left.M _ { theta theta} right | _ {r = a} = { frac { nu qa ^ {2}} {8}} ~, ~~ left.M_ {rr} right | _ {r = 0} = left.M_ { theta theta} right | _ {r = 0} = - { frac {(1+ nu) qa ^ {2}} {16}} ,.} Obdélníkové desky Kirchhoff-Love Ohýbání obdélníkové desky působením rozložené síly
q { displaystyle q} na jednotku plochy.
Pro obdélníkové desky zavedl Navier v roce 1820 jednoduchou metodu pro zjištění posunutí a napětí, když je deska jednoduše podepřena. Myšlenkou bylo vyjádřit aplikované zatížení z hlediska Fourierových komponent, najít řešení pro sinusové zatížení (jedna Fourierova komponenta) a poté překrýt Fourierovy komponenty, aby se získalo řešení pro libovolné zatížení.
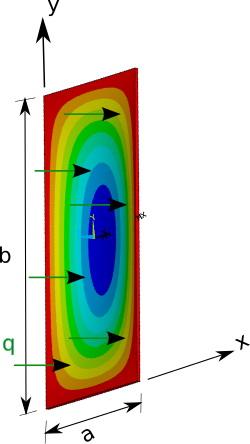
Sinusové zatížení Předpokládejme, že zatížení má formu
q ( X , y ) = q 0 hřích π X A hřích π y b . { displaystyle q (x, y) = q_ {0} sin { frac { pi x} {a}} sin { frac { pi y} {b}} ,.} Tady q 0 { displaystyle q_ {0}} A { displaystyle a} X { displaystyle x} b { displaystyle b} y { displaystyle y}
Protože je deska jednoduše podepřena, posunutí w ( X , y ) { displaystyle w (x, y)} M X X { displaystyle M_ {xx}} X = 0 { displaystyle x = 0} X = A { displaystyle x = a} M y y { displaystyle M_ {yy}} y = 0 { displaystyle y = 0} y = b { displaystyle y = b}
Použijeme-li tyto okrajové podmínky a vyřešíme deskovou rovnici, dostaneme řešení
w ( X , y ) = q 0 π 4 D ( 1 A 2 + 1 b 2 ) − 2 hřích π X A hřích π y b . { displaystyle w (x, y) = { frac {q_ {0}} { pi ^ {4} D}} , left ({ frac {1} {a ^ {2}}} + { frac {1} {b ^ {2}}} vpravo) ^ {- 2} , sin { frac { pi x} {a}} sin { frac { pi y} {b} } ,.} Kde D je ohybová tuhost
D = E t 3 12 ( 1 − ν 2 ) { displaystyle D = { frac {Et ^ {3}} {12 (1- nu ^ {2})}}} Analogicky jako ohybová tuhost EI.[3]
Pro obecnější zatížení formuláře
q ( X , y ) = q 0 hřích m π X A hřích n π y b { displaystyle q (x, y) = q_ {0} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} kde m { displaystyle m} n { displaystyle n}
(1) w ( X , y ) = q 0 π 4 D ( m 2 A 2 + n 2 b 2 ) − 2 hřích m π X A hřích n π y b . { displaystyle { text {(1)}} qquad w (x, y) = { frac {q_ {0}} { pi ^ {4} D}} , left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}}} vpravo) ^ {- 2} , sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} ,.} Řešení Navier Rovnice dvojité trigonometrické řady Definujeme obecné zatížení q ( X , y ) { displaystyle q (x, y)}
q ( X , y ) = ∑ m = 1 ∞ ∑ n = 1 ∞ A m n hřích m π X A hřích n π y b { displaystyle q (x, y) = součet _ {m = 1} ^ { infty} součet _ {n = 1} ^ { infty} a_ {mn} sin { frac {m pi x } {a}} sin { frac {n pi y} {b}}} kde A m n { displaystyle a_ {mn}}
A m n = 4 A b ∫ 0 b ∫ 0 A q ( X , y ) hřích m π X A hřích n π y b d X d y { displaystyle a_ {mn} = { frac {4} {ab}} int _ {0} ^ {b} int _ {0} ^ {a} q (x, y) sin { frac { m pi x} {a}} sin { frac {n pi y} {b}} , { text {d}} x { text {d}} y} Klasická pravoúhlá rovnice pro malé výchylky se tak stává:
∂ 4 w ∂ X 4 + 2 ∂ 4 w ∂ X 2 ∂ y 2 + ∂ 4 w ∂ y 4 = 1 D ∑ m = 1 ∞ ∑ n = 1 ∞ A m n hřích m π X A hřích n π y b { displaystyle { cfrac { částečné ^ {4} w} { částečné x ^ {4}}} + 2 { cfrac { částečné ^ {4} w} { částečné x ^ {2} částečné y ^ {2}}} + { cfrac { částečné ^ {4} w} { částečné y ^ {4}}} = { cfrac {1} {D}} součet _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} a_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} } Jednoduše podepřená deska s obecným zatížením Předpokládáme řešení w ( X , y ) { displaystyle w (x, y)}
w ( X , y ) = ∑ m = 1 ∞ ∑ n = 1 ∞ w m n hřích m π X A hřích n π y b { displaystyle w (x, y) = součet _ {m = 1} ^ { infty} součet _ {n = 1} ^ { infty} w_ {mn} sin { frac {m pi x } {a}} sin { frac {n pi y} {b}}} Dílčí diferenciály této funkce jsou dány vztahem
∂ 4 w ∂ X 4 = ∑ m = 1 ∞ ∑ n = 1 ∞ ( m π A ) 4 w m n hřích m π X A hřích n π y b { displaystyle { cfrac { částečné ^ {4} w} { částečné x ^ {4}}} = součet _ {m = 1} ^ { infty} součet _ {n = 1} ^ { infty} left ({ frac {m pi} {a}} right) ^ {4} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} ∂ 4 w ∂ X 2 ∂ y 2 = ∑ m = 1 ∞ ∑ n = 1 ∞ ( m π A ) 2 ( n π b ) 2 w m n hřích m π X A hřích n π y b { displaystyle { cfrac { částečné ^ {4} w} { částečné x ^ {2} částečné y ^ {2}}} = součet _ {m = 1} ^ { infty} součet _ { n = 1} ^ { infty} left ({ frac {m pi} {a}} right) ^ {2} left ({ frac {n pi} {b}} right) ^ {2} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} ∂ 4 w ∂ y 4 = ∑ m = 1 ∞ ∑ n = 1 ∞ ( n π b ) 4 w m n hřích m π X A hřích n π y b { displaystyle { cfrac { částečné ^ {4} w} { částečné y ^ {4}}} = součet _ {m = 1} ^ { infty} součet _ {n = 1} ^ { infty} left ({ frac {n pi} {b}} right) ^ {4} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Dosazením těchto výrazů do deskové rovnice máme
∑ m = 1 ∞ ∑ n = 1 ∞ ( ( m π A ) 2 + ( n π b ) 2 ) 2 w m n hřích m π X A hřích n π y b = ∑ m = 1 ∞ ∑ n = 1 ∞ A m n D hřích m π X A hřích n π y b { displaystyle sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} left ( left ({ frac {m pi} {a}} right) ^ {2} + left ({ frac {n pi} {b}} right) ^ {2} right) ^ {2} w_ {mn} sin { frac {m pi x} { a}} sin { frac {n pi y} {b}} = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} { cfrac {a_ {mn}} {D}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Rovníme dva výrazy a máme
( ( m π A ) 2 + ( n π b ) 2 ) 2 w m n = A m n D { displaystyle left ( left ({ frac {m pi} {a}} right) ^ {2} + left ({ frac {n pi} {b}} right) ^ {2 } right) ^ {2} w_ {mn} = { cfrac {a_ {mn}} {D}}} které mohou být přeskupeny tak, aby poskytly
w m n = 1 π 4 D A m n ( m 2 A 2 + n 2 b 2 ) 2 { displaystyle w_ {mn} = { frac {1} { pi ^ {4} D}} { frac {a_ {mn}} { vlevo ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}}} right) ^ {2}}}} Průhyb jednoduše podepřené desky (rohového původu) s obecným zatížením je dán vztahem
w ( X , y ) = 1 π 4 D ∑ m = 1 ∞ ∑ n = 1 ∞ A m n ( m 2 A 2 + n 2 b 2 ) 2 hřích m π X A hřích n π y b { displaystyle w (x, y) = { frac {1} { pi ^ {4} D}} součet _ {m = 1} ^ { infty} součet _ {n = 1} ^ { infty} { frac {a_ {mn}} { left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2} }} vpravo) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Jednoduše podepřená deska s rovnoměrně rozloženým zatížením Zdvihový objem (
w { displaystyle w} )
Stres (
σ X X { displaystyle sigma _ {xx}} )
Stres (
σ y y { displaystyle sigma _ {rr}} )
Posunutí a napětí spolu
X = A / 2 { displaystyle x = a / 2} pro obdélníkový talíř s
A = 20 { displaystyle a = 20} mm,
b = 40 { displaystyle b = 40} mm,
H = 2 h = 0.4 { displaystyle H = 2h = 0,4} mm,
E = 70 { displaystyle E = 70} GPa a
ν = 0.35 { displaystyle nu = 0,35} pod zatížením
q 0 = − 10 { displaystyle q_ {0} = - 10} kPa. Červená čára představuje spodní část desky, zelená čára uprostřed a modrá čára horní část desky.
Pro rovnoměrně rozložené zatížení máme
q ( X , y ) = q 0 { displaystyle q (x, y) = q_ {0}} Odpovídající Fourierův koeficient je tedy dán vztahem
A m n = 4 A b ∫ 0 A ∫ 0 b q 0 hřích m π X A hřích n π y b d X d y { displaystyle a_ {mn} = { frac {4} {ab}} int _ {0} ^ {a} int _ {0} ^ {b} q_ {0} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} , { text {d}} x { text {d}} y} Vyhodnocením dvojitého integrálu máme
A m n = 4 q 0 π 2 m n ( 1 − cos m π ) ( 1 − cos n π ) { displaystyle a_ {mn} = { frac {4q_ {0}} { pi ^ {2} mn}} (1- cos m pi) (1- cos n pi)} nebo alternativně v a po částech formát, máme
A m n = { 16 q 0 π 2 m n m a n zvláštní 0 m nebo n dokonce { displaystyle a_ {mn} = { begin {cases} { cfrac {16q_ {0}} { pi ^ {2} mn}} & m ~ { text {and}} ~ n ~ { text {liché }} 0 & m ~ { text {or}} ~ n ~ { text {even}} end {cases}}} Vychýlení jednoduše podepřené desky (rohového původu) s rovnoměrně rozloženým zatížením je dáno vztahem
w ( X , y ) = 16 q 0 π 6 D ∑ m = 1 , 3 , 5 , . . . ∞ ∑ n = 1 , 3 , 5 , . . . ∞ 1 m n ( m 2 A 2 + n 2 b 2 ) 2 hřích m π X A hřích n π y b { displaystyle w (x, y) = { frac {16q_ {0}} { pi ^ {6} D}} součet _ {m = 1,3,5, ...} ^ { infty} sum _ {n = 1,3,5, ...} ^ { infty} { frac {1} {mn left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}}} vpravo) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Ohybové momenty na jednotku délky v desce jsou dány vztahem
M X = 16 q 0 π 4 ∑ m = 1 , 3 , 5 , . . . ∞ ∑ n = 1 , 3 , 5 , . . . ∞ m 2 A 2 + ν n 2 b 2 m n ( m 2 A 2 + n 2 b 2 ) 2 hřích m π X A hřích n π y b { displaystyle M_ {x} = { frac {16q_ {0}} { pi ^ {4}}} součet _ {m = 1,3,5, ...} ^ { infty} součet _ {n = 1,3,5, ...} ^ { infty} { frac {{ frac {m ^ {2}} {a ^ {2}}} + nu { frac {n ^ { 2}} {b ^ {2}}}} {mn left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ { 2}}} vpravo) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} M y = 16 q 0 π 4 ∑ m = 1 , 3 , 5 , . . . ∞ ∑ n = 1 , 3 , 5 , . . . ∞ n 2 b 2 + ν m 2 A 2 m n ( m 2 A 2 + n 2 b 2 ) 2 hřích m π X A hřích n π y b { displaystyle M_ {y} = { frac {16q_ {0}} { pi ^ {4}}} součet _ {m = 1,3,5, ...} ^ { infty} součet _ {n = 1,3,5, ...} ^ { infty} { frac {{ frac {n ^ {2}} {b ^ {2}}} + nu { frac {m ^ { 2}} {a ^ {2}}}} {mn left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ { 2}}} vpravo) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Lévyho řešení Jiný přístup navrhl Lévy [4] Y m ( y ) { displaystyle Y_ {m} (y)} y = 0 { displaystyle y = 0} y = b { displaystyle y = b} ∇ 2 ∇ 2 w = q / D { displaystyle nabla ^ {2} nabla ^ {2} w = q / D}
Předpokládejme to
w ( X , y ) = ∑ m = 1 ∞ Y m ( y ) hřích m π X A . { displaystyle w (x, y) = součet _ {m = 1} ^ { infty} Y_ {m} (y) sin { frac {m pi x} {a}} ,.} Pro desku, která je jednoduše podepřena X = 0 { displaystyle x = 0} X = A { displaystyle x = a} w = 0 { displaystyle w = 0} M X X = 0 { displaystyle M_ {xx} = 0} ∂ w / ∂ y = 0 { displaystyle částečné w / částečné y = 0} ∂ 2 w / ∂ y 2 = 0 { displaystyle částečné ^ {2} w / částečné y ^ {2} = 0} ∂ 2 w / ∂ X 2 = 0 { displaystyle částečné ^ {2} w / částečné x ^ {2} = 0}
Okamžiky podél okrajů Zvažte případ čistého momentového zatížení. V tom případě q = 0 { displaystyle q = 0} w ( X , y ) { displaystyle w (x, y)} ∇ 2 ∇ 2 w = 0 { displaystyle nabla ^ {2} nabla ^ {2} w = 0}
∂ 4 w ∂ X 4 + 2 ∂ 4 w ∂ X 2 ∂ y 2 + ∂ 4 w ∂ y 4 = 0 . { displaystyle { frac { částečné ^ {4} w} { částečné x ^ {4}}} + 2 { frac { částečné ^ {4} w} { částečné x ^ {2} částečné y ^ {2}}} + { frac { částečné ^ {4} w} { částečné y ^ {4}}} = 0 ,.} Zapojení výrazu pro w ( X , y ) { displaystyle w (x, y)}
∑ m = 1 ∞ [ ( m π A ) 4 Y m hřích m π X A − 2 ( m π A ) 2 d 2 Y m d y 2 hřích m π X A + d 4 Y m d y 4 hřích m π X A ] = 0 { displaystyle sum _ {m = 1} ^ { infty} left [ left ({ frac {m pi} {a}} right) ^ {4} Y_ {m} sin { frac {m pi x} {a}} - 2 vlevo ({ frac {m pi} {a}} vpravo) ^ {2} { cfrac {d ^ {2} Y_ {m}} {dy ^ {2}}} sin { frac {m pi x} {a}} + { frac {d ^ {4} Y_ {m}} {dy ^ {4}}} sin { frac { m pi x} {a}} vpravo] = 0} nebo
d 4 Y m d y 4 − 2 m 2 π 2 A 2 d 2 Y m d y 2 + m 4 π 4 A 4 Y m = 0 . { displaystyle { frac {d ^ {4} Y_ {m}} {dy ^ {4}}} - 2 { frac {m ^ {2} pi ^ {2}} {a ^ {2}} } { cfrac {d ^ {2} Y_ {m}} {dy ^ {2}}} + { frac {m ^ {4} pi ^ {4}} {a ^ {4}}} Y_ { m} = 0 ,.} Toto je obyčejná diferenciální rovnice, která má obecné řešení
Y m = A m hovno m π y A + B m m π y A hovno m π y A + C m sinh m π y A + D m m π y A sinh m π y A { displaystyle Y_ {m} = A_ {m} cosh { frac {m pi y} {a}} + B_ {m} { frac {m pi y} {a}} cosh { frac {m pi y} {a}} + C_ {m} sinh { frac {m pi y} {a}} + D_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}}} kde A m , B m , C m , D m { displaystyle A_ {m}, B_ {m}, C_ {m}, D_ {m}}
w ( X , y ) = ∑ m = 1 ∞ [ ( A m + B m m π y A ) hovno m π y A + ( C m + D m m π y A ) sinh m π y A ] hřích m π X A . { displaystyle w (x, y) = součet _ {m = 1} ^ { infty} left [ left (A_ {m} + B_ {m} { frac {m pi y} {a} } right) cosh { frac {m pi y} {a}} + left (C_ {m} + D_ {m} { frac {m pi y} {a}} right) sinh { frac {m pi y} {a}} doprava] sin { frac {m pi x} {a}} ,.} Vyberme souřadnicový systém tak, aby hranice desky byly rovné X = 0 { displaystyle x = 0} X = A { displaystyle x = a} y = ± b / 2 { displaystyle y = pm b / 2} y = 0 { displaystyle y = 0} y = b { displaystyle y = b} y = ± b / 2 { displaystyle y = pm b / 2}
w = 0 , − D ∂ 2 w ∂ y 2 | y = b / 2 = F 1 ( X ) , − D ∂ 2 w ∂ y 2 | y = − b / 2 = F 2 ( X ) { displaystyle w = 0 ,, - D { frac { částečné ^ {2} w} { částečné y ^ {2}}} { Bigr |} _ {y = b / 2} = f_ {1 } (x) ,, - D { frac { částečné ^ {2} w} { částečné y ^ {2}}} { Bigr |} _ {y = -b / 2} = f_ {2} (X)} kde F 1 ( X ) , F 2 ( X ) { displaystyle f_ {1} (x), f_ {2} (x)} symetrický kdekoli
M y y | y = − b / 2 = M y y | y = b / 2 { displaystyle M_ {yy} { Bigr |} _ {y = -b / 2} = M_ {yy} { Bigr |} _ {y = b / 2}} a
F 1 ( X ) = F 2 ( X ) = ∑ m = 1 ∞ E m hřích m π X A { displaystyle f_ {1} (x) = f_ {2} (x) = součet _ {m = 1} ^ { infty} E_ {m} sin { frac {m pi x} {a} }} my máme
w ( X , y ) = A 2 2 π 2 D ∑ m = 1 ∞ E m m 2 hovno α m hřích m π X A ( α m tanh α m hovno m π y A − m π y A sinh m π y A ) { displaystyle w (x, y) = { frac {a ^ {2}} {2 pi ^ {2} D}} součet _ {m = 1} ^ { infty} { frac {E_ { m}} {m ^ {2} cosh alpha _ {m}}} , sin { frac {m pi x} {a}} , left ( alpha _ {m} tanh alpha _ {m} cosh { frac {m pi y} {a}} - { frac {m pi y} {a}} sinh { frac {m pi y} {a}} že jo)} kde
α m = m π b 2 A . { displaystyle alpha _ {m} = { frac {m pi b} {2a}} ,.} Podobně pro antisymetrický případ kde
M y y | y = − b / 2 = − M y y | y = b / 2 { displaystyle M_ {yy} { Bigr |} _ {y = -b / 2} = - M_ {yy} { Bigr |} _ {y = b / 2}} my máme
w ( X , y ) = A 2 2 π 2 D ∑ m = 1 ∞ E m m 2 sinh α m hřích m π X A ( α m coth α m sinh m π y A − m π y A hovno m π y A ) . { displaystyle w (x, y) = { frac {a ^ {2}} {2 pi ^ {2} D}} součet _ {m = 1} ^ { infty} { frac {E_ { m}} {m ^ {2} sinh alpha _ {m}}} , sin { frac {m pi x} {a}} , left ( alpha _ {m} coth alpha _ {m} sinh { frac {m pi y} {a}} - { frac {m pi y} {a}} cosh { frac {m pi y} {a}} že jo),.} Můžeme superpozice symetrických a antisymetrických řešení získat více obecných řešení.
Jednoduše podepřená deska s rovnoměrně rozloženým zatížením Pro rovnoměrně rozložené zatížení máme
q ( X , y ) = q 0 { displaystyle q (x, y) = q_ {0}} Vychýlení jednoduše podepřené desky se středem ( A 2 , 0 ) { displaystyle left ({ frac {a} {2}}, 0 right)}
w ( X , y ) = q 0 A 4 D ∑ m = 1 , 3 , 5 , . . . ∞ ( A m hovno m π y A + B m m π y A sinh m π y A + G m ) hřích m π X A kde A m = − 2 ( α m tanh α m + 2 ) π 5 m 5 hovno α m B m = 2 π 5 m 5 hovno α m G m = 4 π 5 m 5 a α m = m π b 2 A { displaystyle { begin {aligned} & w (x, y) = { frac {q_ {0} a ^ {4}} {D}} sum _ {m = 1,3,5, ...} ^ { infty} left (A_ {m} cosh { frac {m pi y} {a}} + B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} + G_ {m} vpravo) sin { frac {m pi x} {a}} & { begin {zarovnáno} { text {kde} } quad & A_ {m} = - { frac {2 left ( alpha _ {m} tanh alpha _ {m} +2 right)} { pi ^ {5} m ^ {5} cosh alpha _ {m}}} & B_ {m} = { frac {2} { pi ^ {5} m ^ {5} cosh alpha _ {m}}} & G_ {m} = { frac {4} { pi ^ {5} m ^ {5}}} { text {and}} quad & alpha _ {m} = { frac {m pi b } {2a}} end {zarovnaný}} end {zarovnaný}}} Ohybové momenty na jednotku délky v desce jsou dány vztahem
M X = − q 0 π 2 A 2 ∑ m = 1 , 3 , 5 , . . . ∞ m 2 ( ( ( ν − 1 ) A m + 2 ν B m ) hovno m π y A + ( ν − 1 ) B m m π y A sinh m π y A − G m ) hřích m π X A { displaystyle M_ {x} = - q_ {0} pi ^ {2} a ^ {2} sum _ {m = 1,3,5, ...} ^ { infty} m ^ {2} left ( left ( left ( nu -1 right) A_ {m} +2 nu B_ {m} right) cosh { frac {m pi y} {a}} + left ( nu -1 right) B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} - G_ {m} right) sin { frac {m pi x} {a}}} M y = − q 0 π 2 A 2 ∑ m = 1 , 3 , 5 , . . . ∞ m 2 ( ( ( 1 − ν ) A m + 2 B m ) hovno m π y A + ( 1 − ν ) B m m π y A sinh m π y A − ν G m ) hřích m π X A { displaystyle M_ {y} = - q_ {0} pi ^ {2} a ^ {2} sum _ {m = 1,3,5, ...} ^ { infty} m ^ {2} left ( left ( left (1- nu right) A_ {m} + 2B_ {m} right) cosh { frac {m pi y} {a}} + left (1- nu right) B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} - nu G_ {m} right) sin { frac {m pi x} {a}}} Rovnoměrné a symetrické momentové zatížení Pro speciální případ, kdy je zatížení symetrické a moment je jednotný, máme na y = ± b / 2 { displaystyle y = pm b / 2}
M y y = F 1 ( X ) = 4 M 0 π ∑ m = 1 ∞ 1 2 m − 1 hřích ( 2 m − 1 ) π X A . { displaystyle M_ {yy} = f_ {1} (x) = { frac {4M_ {0}} { pi}} sum _ {m = 1} ^ { infty} { frac {1} { 2m-1}} , sin { frac {(2m-1) pi x} {a}} ,.} Zdvihový objem (
w { displaystyle w} )
Napětí v ohybu (
σ y y { displaystyle sigma _ {rr}} )
Příčné smykové napětí (
σ y z { displaystyle sigma _ {yz}} )
Posunutí a napětí pro obdélníkovou desku pod rovnoměrným ohybovým momentem podél okrajů
y = − b / 2 { displaystyle y = -b / 2} a
y = b / 2 { displaystyle y = b / 2} . Napětí v ohybu
σ y y { displaystyle sigma _ {rr}} je podél spodního povrchu desky. Příčné smykové napětí
σ y z { displaystyle sigma _ {yz}} je podél středního povrchu desky.
Výsledné posunutí je
w ( X , y ) = 2 M 0 A 2 π 3 D ∑ m = 1 ∞ 1 ( 2 m − 1 ) 3 hovno α m hřích ( 2 m − 1 ) π X A × [ α m tanh α m hovno ( 2 m − 1 ) π y A − ( 2 m − 1 ) π y A sinh ( 2 m − 1 ) π y A ] { displaystyle { begin {aligned} & w (x, y) = { frac {2M_ {0} a ^ {2}} { pi ^ {3} D}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) ^ {3} cosh alpha _ {m}}} sin { frac {(2m-1) pi x} {a}} krát & ~~ left [ alpha _ {m} , tanh alpha _ {m} cosh { frac {(2m-1) pi y} {a}} - { frac {(2m -1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} doprava] konec {zarovnáno}}} kde
α m = π ( 2 m − 1 ) b 2 A . { displaystyle alpha _ {m} = { frac { pi (2m-1) b} {2a}} ,.} Ohybové momenty a smykové síly odpovídající posunutí w { displaystyle w}
M X X = − D ( ∂ 2 w ∂ X 2 + ν ∂ 2 w ∂ y 2 ) = 2 M 0 ( 1 − ν ) π ∑ m = 1 ∞ 1 ( 2 m − 1 ) hovno α m × hřích ( 2 m − 1 ) π X A × [ − ( 2 m − 1 ) π y A sinh ( 2 m − 1 ) π y A + { 2 ν 1 − ν + α m tanh α m } hovno ( 2 m − 1 ) π y A ] M X y = ( 1 − ν ) D ∂ 2 w ∂ X ∂ y = − 2 M 0 ( 1 − ν ) π ∑ m = 1 ∞ 1 ( 2 m − 1 ) hovno α m × cos ( 2 m − 1 ) π X A × [ ( 2 m − 1 ) π y A hovno ( 2 m − 1 ) π y A + ( 1 − α m tanh α m ) sinh ( 2 m − 1 ) π y A ] Q z X = ∂ M X X ∂ X − ∂ M X y ∂ y = 4 M 0 A ∑ m = 1 ∞ 1 hovno α m × cos ( 2 m − 1 ) π X A hovno ( 2 m − 1 ) π y A . { displaystyle { begin {aligned} M_ {xx} & = - D left ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + nu , { frac { částečné ^ {2} w} { částečné y ^ {2}}} pravé) & = { frac {2M_ {0} (1- nu)} { pi}} součet _ { m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ sin { frac {(2m-1) pi x} {a}} , times & ~ left [- { frac {(2m-1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} + vpravo. & qquad qquad qquad qquad vlevo. vlevo {{ frac {2 nu} {1- nu}} + alpha _ {m} tanh alpha _ {m} right } cosh { frac {(2m-1) pi y} {a}} right] M_ {xy} & = (1- nu) D { frac { částečné ^ {2} w} { částečné x částečné y}} & = - { frac {2M_ {0} (1- nu)} { pi}} součet _ {m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a}} , times & ~ left [{ frac {(2m-1) pi y} {a}} cosh { frac {(2m-1) pi y} {a}} + vpravo. & qquad qquad qquad qquad vlevo. (1- alpha _ {m} tanh alpha _ {m}) sinh { frac {(2 m-1 ) pi y} {a}} doprava] Q_ {zx} & = { frac { částečné M_ {xx}} { částečné x}} - { frac { částečné M_ {xy}} { částečné y}} & = { frac {4M_ {0}} {a}} součet _ {m = 1} ^ { infty} { frac {1} { cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a} } cosh { frac {(2m-1) pi y} {a}} ,. end {zarovnáno}}} Stresy jsou
σ X X = 12 z h 3 M X X a σ z X = 1 κ h Q z X ( 1 − 4 z 2 h 2 ) . { displaystyle sigma _ {xx} = { frac {12z} {h ^ {3}}} , M_ {xx} quad { text {a}} quad sigma _ {zx} = { frac {1} { kappa h}} , Q_ {zx} left (1 - { frac {4z ^ {2}} {h ^ {2}}} right) ,.} Válcové ohýbání desky K válcovému ohybu dochází, když obdélníková deska má rozměry A × b × h { displaystyle a times b times h} A ≪ b { displaystyle a ll b} h { displaystyle h}
Jednoduše podepřená deska s axiálně pevnými konci Pro jednoduše podepřenou desku pod válcovým ohybem s hranami, které se mohou volně otáčet, ale mají pevné X 1 { displaystyle x_ {1}}
Ohýbání tlustých desek Mindlin U silných desek musíme vzít v úvahu vliv nůžek po celé tloušťce na orientaci normály na střední plochu po deformaci. Mindlinova teorie poskytuje jeden přístup k nalezení deformace a napětí v těchto deskách. Řešení Mindlinovy teorie lze odvodit z ekvivalentních řešení Kirchhoff-Love pomocí kanonických vztahů.[5]
Řídící rovnice Kanonickou řídící rovnici pro izotropní silné desky lze vyjádřit jako[5]
∇ 2 ( M − B 1 + ν q ) = − q κ G h ( ∇ 2 w + M D ) = − ( 1 − B C 2 1 + ν ) q ∇ 2 ( ∂ φ 1 ∂ X 2 − ∂ φ 2 ∂ X 1 ) = C 2 ( ∂ φ 1 ∂ X 2 − ∂ φ 2 ∂ X 1 ) { displaystyle { begin {aligned} & nabla ^ {2} left ({ mathcal {M}} - { frac { mathcal {B}} {1+ nu}} , q right) = -q & kappa Gh left ( nabla ^ {2} w + { frac { mathcal {M}} {D}} right) = - left (1 - { cfrac {{ mathcal {B}} c ^ {2}} {1+ nu}} vpravo) q & nabla ^ {2} vlevo ({ frac { částečné varphi _ {1}} { částečné x_ {2}}} - { frac { částečné varphi _ {2}} { částečné x_ {1}}} pravé) = c ^ {2} levé ({ frac { částečné varphi _ { 1}} { částečné x_ {2}}} - { frac { částečné varphi _ {2}} { částečné x_ {1}}} vpravo) konec {zarovnáno}}} kde q { displaystyle q} G { displaystyle G} D = E h 3 / [ 12 ( 1 − ν 2 ) ] { displaystyle D = Eh ^ {3} / [12 (1- nu ^ {2})]} h { displaystyle h} C 2 = 2 κ G h / [ D ( 1 − ν ) ] { displaystyle c ^ {2} = 2 kappa Gh / [D (1- nu)]} κ { displaystyle kappa} E { displaystyle E} ν { displaystyle nu}
M = D [ A ( ∂ φ 1 ∂ X 1 + ∂ φ 2 ∂ X 2 ) − ( 1 − A ) ∇ 2 w ] + 2 q 1 − ν 2 B . { displaystyle { mathcal {M}} = D left [{ mathcal {A}} left ({ frac { partial varphi _ {1}} { částečné x_ {1}}} + { frac { částečné varphi _ {2}} { částečné x_ {2}}} pravé) - (1 - { mathcal {A}}) nabla ^ {2} w pravé] + { frac { 2q} {1- nu ^ {2}}} { mathcal {B}} ,.} V Mindlinově teorii w { displaystyle w} φ 1 { displaystyle varphi _ {1}} φ 2 { displaystyle varphi _ {2}} X 2 { displaystyle x_ {2}} X 1 { displaystyle x_ {1}} A = 1 { displaystyle { mathcal {A}} = 1} B = 0 { displaystyle { mathcal {B}} = 0} κ { displaystyle kappa} 5 / 6 { displaystyle 5/6}
Řešení řídících rovnic lze nalézt, pokud poznáme odpovídající Kirchhoff-Love řešení pomocí vztahů
w = w K. + M K. κ G h ( 1 − B C 2 2 ) − Φ + Ψ φ 1 = − ∂ w K. ∂ X 1 − 1 κ G h ( 1 − 1 A − B C 2 2 ) Q 1 K. + ∂ ∂ X 1 ( D κ G h A ∇ 2 Φ + Φ − Ψ ) + 1 C 2 ∂ Ω ∂ X 2 φ 2 = − ∂ w K. ∂ X 2 − 1 κ G h ( 1 − 1 A − B C 2 2 ) Q 2 K. + ∂ ∂ X 2 ( D κ G h A ∇ 2 Φ + Φ − Ψ ) + 1 C 2 ∂ Ω ∂ X 1 { displaystyle { begin {aligned} w & = w ^ {K} + { frac {{ mathcal {M}} ^ {K}} { kappa Gh}} left (1 - { frac {{ mathcal {B}} c ^ {2}} {2}} vpravo) - Phi + Psi varphi _ {1} & = - { frac { částečné w ^ {K}} { částečné x_ {1}}} - { frac {1} { kappa Gh}} left (1 - { frac {1} { mathcal {A}}} - { frac {{ mathcal {B}} c ^ {2}} {2}} vpravo) Q_ {1} ^ {K} + { frac { částečné} { částečné x_ {1}}} vlevo ({ frac {D} { kappa Gh { mathcal {A}}}} nabla ^ {2} Phi + Phi - Psi right) + { frac {1} {c ^ {2}}} { frac { částečné Omega } { částečné x_ {2}}} varphi _ {2} & = - { frac { částečné w ^ {K}} { částečné x_ {2}}} - { frac {1} { kappa Gh}} vlevo (1 - { frac {1} { mathcal {A}}} - { frac {{ mathcal {B}} c ^ {2}} {2}} vpravo) Q_ {2} ^ {K} + { frac { částečné} { částečné x_ {2}}} vlevo ({ frac {D} { kappa Gh { mathcal {A}}}} nabla ^ { 2} Phi + Phi - Psi right) + { frac {1} {c ^ {2}}} { frac { částečné Omega} { částečné x_ {1}}} end {zarovnáno }}} kde w K. { displaystyle w ^ {K}} Φ { displaystyle Phi} ∇ 2 ∇ 2 Φ = 0 { displaystyle nabla ^ {2} nabla ^ {2} Phi = 0} Ψ { displaystyle Psi} ∇ 2 Ψ = 0 { displaystyle nabla ^ {2} Psi = 0}
M = M K. + B 1 + ν q + D ∇ 2 Φ ; M K. := − D ∇ 2 w K. Q 1 K. = − D ∂ ∂ X 1 ( ∇ 2 w K. ) , Q 2 K. = − D ∂ ∂ X 2 ( ∇ 2 w K. ) Ω = ∂ φ 1 ∂ X 2 − ∂ φ 2 ∂ X 1 , ∇ 2 Ω = C 2 Ω . { displaystyle { begin {aligned} { mathcal {M}} & = { mathcal {M}} ^ {K} + { frac { mathcal {B}} {1+ nu}} , q + D nabla ^ {2} Phi ~; ~~ { mathcal {M}} ^ {K}: = - D nabla ^ {2} w ^ {K} Q_ {1} ^ {K} & = - D { frac { částečné} { částečné x_ {1}}} vlevo ( nabla ^ {2} w ^ {K} vpravo) ~, ~~ Q_ {2} ^ {K} = -D { frac { částečné} { částečné x_ {2}}} vlevo ( nabla ^ {2} w ^ {K} vpravo) Omega & = { frac { částečné varphi _ {1}} { částečné x_ {2}}} - { frac { částečné varphi _ {2}} { částečné x_ {1}}} ~, ~~ nabla ^ {2} Omega = c ^ {2} Omega ,. End {zarovnáno}}} Jednoduše podepřené obdélníkové desky U jednoduše podepřených desek je Marcusův moment součet zmizí, tj.
M = 1 1 + ν ( M 11 + M 22 ) = D ( ∂ φ 1 ∂ X 1 + ∂ φ 2 ∂ X 2 ) = 0 . { displaystyle { mathcal {M}} = { frac {1} {1+ nu}} (M_ {11} + M_ {22}) = D vlevo ({ frac { částečné varphi _ { 1}} { částečné x_ {1}}} + { frac { částečné varphi _ {2}} { částečné x_ {2}}} vpravo) = 0 ,.} V tom případě funkce Φ { displaystyle Phi} Ψ { displaystyle Psi} Ω { displaystyle Omega}
w = w K. + M K. κ G h . { displaystyle w = w ^ {K} + { frac {{ mathcal {M}} ^ {K}} { kappa Gh}} ,.} Ohýbání konzolových desek Reissner-Stein Reissner-Steinova teorie pro konzolové desky[6] q X ( y ) { displaystyle q_ {x} (y)} X = A { displaystyle x = a}
b D d 4 w X d X 4 = 0 b 3 D 12 d 4 θ X d X 4 − 2 b D ( 1 − ν ) d 2 θ X d X 2 = 0 { displaystyle { begin {aligned} & bD { frac { mathrm {d} ^ {4} w_ {x}} { mathrm {d} x ^ {4}}} = 0 & { frac { b ^ {3} D} {12}} , { frac { mathrm {d} ^ {4} theta _ {x}} { mathrm {d} x ^ {4}}} - 2bD (1 - nu) { cfrac {d ^ {2} theta _ {x}} {dx ^ {2}}} = 0 end {zarovnáno}}} a okrajové podmínky v X = A { displaystyle x = a}
b D d 3 w X d X 3 + q X 1 = 0 , b 3 D 12 d 3 θ X d X 3 − 2 b D ( 1 − ν ) d θ X d X + q X 2 = 0 b D d 2 w X d X 2 = 0 , b 3 D 12 d 2 θ X d X 2 = 0 . { displaystyle { begin {aligned} & bD { cfrac {d ^ {3} w_ {x}} {dx ^ {3}}} + q_ {x1} = 0 quad, quad { frac {b ^ {3} D} {12}} { cfrac {d ^ {3} theta _ {x}} {dx ^ {3}}} - 2bD (1- nu) { cfrac {d theta _ { x}} {dx}} + q_ {x2} = 0 & bD { cfrac {d ^ {2} w_ {x}} {dx ^ {2}}} = 0 quad, quad { frac { b ^ {3} D} {12}} { cfrac {d ^ {2} theta _ {x}} {dx ^ {2}}} = 0 ,. end {zarovnáno}}} Řešení tohoto systému dvou ODR dává
w X ( X ) = q X 1 6 b D ( 3 A X 2 − X 3 ) θ X ( X ) = q X 2 2 b D ( 1 − ν ) [ X − 1 ν b ( sinh ( ν b A ) hovno [ ν b ( X − A ) ] + tanh [ ν b ( X − A ) ] ) ] { displaystyle { begin {aligned} w_ {x} (x) & = { frac {q_ {x1}} {6bD}} , (3ax ^ {2} -x ^ {3}) theta _ {x} (x) & = { frac {q_ {x2}} {2bD (1- nu)}} left [x - { frac {1} { nu _ {b}}} , left ({ frac { sinh ( nu _ {b} a)} { cosh [ nu _ {b} (xa)]}} + tanh [ nu _ {b} (xa)) vpravo) vpravo] konec {zarovnáno}}} kde ν b = 24 ( 1 − ν ) / b { displaystyle nu _ {b} = { sqrt {24 (1- nu)}} / b} w = w X + y θ X { displaystyle w = w_ {x} + y theta _ {x}}
M X X = − D ( ∂ 2 w ∂ X 2 + ν ∂ 2 w ∂ y 2 ) = q X 1 ( X − A b ) − [ 3 y q X 2 b 3 ν b hovno 3 [ ν b ( X − A ) ] ] × [ 6 sinh ( ν b A ) − sinh [ ν b ( 2 X − A ) ] + sinh [ ν b ( 2 X − 3 A ) ] + 8 sinh [ ν b ( X − A ) ] ] M X y = ( 1 − ν ) D ∂ 2 w ∂ X ∂ y = q X 2 2 b [ 1 − 2 + hovno [ ν b ( X − 2 A ) ] − hovno [ ν b X ] 2 hovno 2 [ ν b ( X − A ) ] ] Q z X = ∂ M X X ∂ X − ∂ M X y ∂ y = q X 1 b − ( 3 y q X 2 2 b 3 hovno 4 [ ν b ( X − A ) ] ) × [ 32 + hovno [ ν b ( 3 X − 2 A ) ] − hovno [ ν b ( 3 X − 4 A ) ] − 16 hovno [ 2 ν b ( X − A ) ] + 23 hovno [ ν b ( X − 2 A ) ] − 23 hovno ( ν b X ) ] . { displaystyle { begin {zarovnáno} M_ {xx} & = - D left ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + nu , { frac { částečné ^ {2} w} { částečné y ^ {2}}} pravé) & = q_ {x1} levé ({ frac {xa} {b}} pravé) - levé [ { frac {3yq_ {x2}} {b ^ {3} nu _ {b} cosh ^ {3} [ nu _ {b} (xa)]}} vpravo] times & quad left [6 sinh ( nu _ {b} a) - sinh [ nu _ {b} (2x-a)] + sinh [ nu _ {b} (2x-3a)] + 8 sinh [ nu _ {b} (xa)] vpravo] M_ {xy} & = (1- nu) D { frac { částečné ^ {2} w} { částečné x částečné y} } & = { frac {q_ {x2}} {2b}} vlevo [1 - { frac {2+ cosh [ nu _ {b} (x-2a)] - cosh [ nu _ {b} x]} {2 cosh ^ {2} [ nu _ {b} (xa)]}} vpravo] Q_ {zx} & = { frac { částečný M_ {xx}} { částečné x}} - { frac { částečné M_ {xy}} { částečné y}} & = { frac {q_ {x1}} {b}} - doleva ({ frac {3yq_ {x2}} {2b ^ {3} cosh ^ {4} [ nu _ {b} (xa)]}} right) times left [32+ cosh [ nu _ {b} (3x -2a)] - cosh [ nu _ {b} (3x-4a)] vpravo. & qquad vlevo.-16 cosh [2 nu _ {b} (xa)] + 23 cosh [ nu _ {b} (x-2a)] - 23 cosh ( nu _ {b} x) right] ,. end {zarovnáno}}} Stresy jsou
σ X X = 12 z h 3 M X X a σ z X = 1 κ h Q z X ( 1 − 4 z 2 h 2 ) . { displaystyle sigma _ {xx} = { frac {12z} {h ^ {3}}} , M_ {xx} quad { text {a}} quad sigma _ {zx} = { frac {1} { kappa h}} , Q_ {zx} left (1 - { frac {4z ^ {2}} {h ^ {2}}} right) ,.} Pokud je aplikované zatížení na hraně konstantní, obnovíme řešení pro nosník pod koncentrovaným koncovým zatížením. Pokud je aplikované zatížení lineární funkcí y { displaystyle y}
q X 1 = ∫ − b / 2 b / 2 q 0 ( 1 2 − y b ) d y = b q 0 2 ; q X 2 = ∫ − b / 2 b / 2 y q 0 ( 1 2 − y b ) d y = − b 2 q 0 12 . { displaystyle q_ {x1} = int _ {- b / 2} ^ {b / 2} q_ {0} vlevo ({ frac {1} {2}} - { frac {y} {b} } right) , { text {d}} y = { frac {bq_ {0}} {2}} ~; ~~ q_ {x2} = int _ {- b / 2} ^ {b / 2} yq_ {0} left ({ frac {1} {2}} - { frac {y} {b}} right) , { text {d}} y = - { frac {b ^ {2} q_ {0}} {12}} ,.} Viz také Reference ^ Reddy, J. N., 2007, Teorie a analýza elastických desek a skořepin , CRC Press, Taylor a Francis. ^ Timoshenko, S. a Woinowsky-Krieger, S., (1959), Teorie desek a skořápek , McGraw-Hill v New Yorku. ^ Cook, R. D. a kol., 2002, Koncepty a aplikace analýzy konečných prvků , John Wiley & Sons ^ Lévy, M., 1899, Potlačí tahy , sv. 129, str. 535-539 ^ A b Lim, G. T. a Reddy, J. N., 2003, Na kanonickém ohýbání vztahy pro desky, International Journal of Solids and Structures, sv. 40, 3039-3067. ^ E. Reissner a M. Stein. Torzní a příčný ohyb konzolových desek. Technical Note 2369, National Advisory Committee for Aeronautics, Washington, 1951. 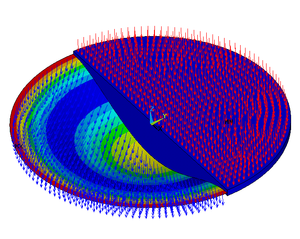



































![{displaystyle {cfrac {partial ^{4}F}{partial x^{4}}}+2{cfrac {partial ^{4}F}{partial x^{2}partial y^{2}}}+{cfrac {partial ^{4}F}{partial y^{4}}}=Eleft[left({cfrac {partial ^{2}w}{partial xpartial y}}
ight)^{2}-{cfrac {partial ^{2}w}{partial x^{2}}}{cfrac {partial ^{2}w}{partial y^{2}}}
ight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a797f21006ff4d841374f445a8e54ab2b7fb279)








![frac{1}{r}cfrac{d }{d r}left[r cfrac{d }{d r}left{frac{1}{r}cfrac{d }{d r}left(r cfrac{d w}{d r}
ight)
ight}
ight] = -frac{q}{D},.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f8083e6e16a9118c0afe8bd3c7e1fe841e17334)















![sigma_{rr} = frac{E}{1-
u^2}left[varepsilon_{rr} +
uvarepsilon_{ heta heta}
ight] ~;~~
sigma_{ heta heta} = frac{E}{1-
u^2}left[varepsilon_{ heta heta} +
uvarepsilon_{rr}
ight] ~;~~
sigma_{r heta} = 0 ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/3113afbe187db314e19db5772f1fb7ec65d5f2bf)

![D = 2Eh^3/[3(1-
u^2)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a71aa263a9aeffc5de8a3eeb37a569a193d2443)
![begin {zarovnat}
sigma_{rr} &= -frac{3qz}{32h^3}left[(1+
u)a^2-(3+
u)r^2
ight]
sigma _ { theta theta} & = - frac {3qz} {32h ^ 3} left [(1+ nu) a ^ 2- (1 + 3 nu) r ^ 2 right]
sigma_ {r theta} & = 0 ,.
end {zarovnat}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e9eae0c15eb3c3606cfcbfadf7e523df1069eae)
![M_ {rr} = - frac {q} {16} left [(1+ nu) a ^ 2- (3+ nu) r ^ 2 right] ~; ~~
M _ { theta theta} = - frac {q} {16} left [(1+ nu) a ^ 2- (1 + 3 nu) r ^ 2 right] ~; ~~
M_ {r theta} = 0 ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fa27857c8e8ae81af9dc56fa29a74b33bc3dad8)




































 Zdvihový objem ()
Zdvihový objem () Stres ()
Stres () Stres ()Posunutí a napětí spolu pro obdélníkový talíř s mm, mm, mm, GPa a pod zatížením kPa. Červená čára představuje spodní část desky, zelená čára uprostřed a modrá čára horní část desky.
Stres ()Posunutí a napětí spolu pro obdélníkový talíř s mm, mm, mm, GPa a pod zatížením kPa. Červená čára představuje spodní část desky, zelená čára uprostřed a modrá čára horní část desky.





























![sum_ {m = 1} ^ infty left [ left ( frac {m pi} {a} right) ^ 4 Y_m sin frac {m pi x} {a}
- 2 left ( frac {m pi} {a} right) ^ 2 cfrac {d ^ 2 Y_m} {d y ^ 2} sin frac {m pi x} {a}
+ frac {d ^ 4Y_m} {dy ^ 4} sin frac {m pi x} {a} vpravo] = 0](https://wikimedia.org/api/rest_v1/media/math/render/svg/c4b7bc6c19d495de8e6086dc8866cf7571b323f9)



![w (x, y) = sum_ {m = 1} ^ infty left [
left (A_m + B_m frac {m pi y} {a} right) cosh frac {m pi y} {a} +
left (C_m + D_m frac {m pi y} {a} right) sinh frac {m pi y} {a}
right] sin frac {m pi x} {a} ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/f35b38c6ddc1b29b74377203666d669c5791b2cc)













 Zdvihový objem ()
Zdvihový objem () Napětí v ohybu ()
Napětí v ohybu () Příčné smykové napětí ()Posunutí a napětí pro obdélníkovou desku pod rovnoměrným ohybovým momentem podél okrajů a . Napětí v ohybu je podél spodního povrchu desky. Příčné smykové napětí je podél středního povrchu desky.
Příčné smykové napětí ()Posunutí a napětí pro obdélníkovou desku pod rovnoměrným ohybovým momentem podél okrajů a . Napětí v ohybu je podél spodního povrchu desky. Příčné smykové napětí je podél středního povrchu desky.






![{ displaystyle { begin {aligned} & w (x, y) = { frac {2M_ {0} a ^ {2}} { pi ^ {3} D}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) ^ {3} cosh alpha _ {m}}} sin { frac {(2m-1) pi x} {a}} krát & ~~ left [ alpha _ {m} , tanh alpha _ {m} cosh { frac {(2m-1) pi y} {a}} - { frac {(2m -1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} doprava] konec {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/05bb4b518f750d8e1aafd47fb079065c5c4a5786)

![{ displaystyle { begin {aligned} M_ {xx} & = - D left ({ frac { částečné ^ {2} w} { částečné x ^ {2}}} + nu , { frac { částečné ^ {2} w} { částečné y ^ {2}}} pravé) & = { frac {2M_ {0} (1- nu)} { pi}} součet _ { m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ sin { frac {(2m-1) pi x} {a}} , times & ~ left [- { frac {(2m-1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} + vpravo. & qquad qquad qquad qquad vlevo. vlevo {{ frac {2 nu} {1- nu}} + alpha _ {m} tanh alpha _ {m} right } cosh { frac {(2m-1) pi y} {a}} right] M_ {xy} & = (1- nu) D { frac { částečné ^ {2} w} { částečné x částečné y}} & = - { frac {2M_ {0} (1- nu)} { pi}} součet _ {m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a}} , times & ~ left [{ frac {(2m-1) pi y} {a}} cosh { frac {(2m-1) pi y} {a}} + vpravo. & qquad qquad qquad qquad vlevo. (1- alpha _ {m} tanh alpha _ {m}) sinh { frac {(2 m-1 ) pi y} {a}} doprava] Q_ {zx} & = { frac { částečné M_ {xx}} { částečné x}} - { frac { částečné M_ {xy}} { částečné y}} & = { frac {4M_ {0}} {a}} součet _ {m = 1} ^ { infty} { frac {1} { cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a} } cosh { frac {(2m-1) pi y} {a}} ,. end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b46371a14545a06c6bb677179132a02137a8fbb4)







![D = Eh ^ 3 / [12 (1- nu ^ 2)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f3bf995e9bb0214179b93d14f38e7e01cf3a671)
![c ^ 2 = 2 kappa G h / [D (1- nu)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/0bc4c3ed836ac15ba7c94c0e0fc3cd9fb1d8825a)

![mathcal {M} = D vlevo [ mathcal {A} vlevo ( frac { částečné varphi_1} { částečné x_1} + frac { částečné varphi_2} { částečné x_2} pravé)
- (1- mathcal {A}) nabla ^ 2 w right] + frac {2q} {1- nu ^ 2} mathcal {B} ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/c93657927f897412a7df1207325d3a731bfa9fed)



















![begin {zarovnat}
w_x (x) & = frac {q_ {x1}} {6bD} , (3ax ^ 2 -x ^ 3)
theta_x (x) & = frac {q_ {x2}} {2bD (1- nu)} left [x - frac {1} { nu_b} ,
left ( frac { sinh ( nu_b a)} { cosh [ nu_b (x-a)]} + tanh [ nu_b (x-a)] right) right]
end {zarovnat}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a9eebb0810de812da44e1e62453b7af0aa8dddf)


![begin {zarovnat}
M_ {xx} & = -D left ( frac { částečné ^ 2 w} { částečné x ^ 2} + nu , frac { částečné ^ 2 w} { částečné y ^ 2} vpravo )
& = q_ {x1} left ( frac {xa} {b} right) - left [ frac {3yq_ {x2}} {b ^ 3 nu_b cosh ^ 3 [ nu_b (xa)]} že jo]
krát
& quad left [6 sinh ( nu_b a) - sinh [ nu_b (2x-a)] +
sinh [ nu_b (2x-3a)] + 8 sinh [ nu_b (x-a)] vpravo]
M_ {xy} & = (1- nu) D frac { částečné ^ 2 w} { částečné x částečné y}
& = frac {q_ {x2}} {2b} vlevo [1 -
frac {2+ cosh [ nu_b (x-2a)] - cosh [ nu_b x]} {2 cosh ^ 2 [ nu_b (x-a)]} vpravo]
Q_ {zx} & = frac { částečné M_ {xx}} { částečné x} - frac { částečné M_ {xy}} { částečné y}
& = frac {q_ {x1}} {b} - left ( frac {3yq_ {x2}} {2b ^ 3 cosh ^ 4 [ nu_b (x-a)]} right) times
left [32 + cosh [ nu_b (3x-2a)] - cosh [ nu_b (3x-4a)] right.
& qquad vlevo. - 16 cosh [2 nu_b (x-a)] +
23 cosh [ nu_b (x-2a)] - 23 cosh ( nu_b x) vpravo] ,.
end {zarovnat}](https://wikimedia.org/api/rest_v1/media/math/render/svg/23db4b670f6da6f2f18a0e2419ca828fbc73d657)
