Tuhá rovnice - Stiff equation
v matematika, a tuhá rovnice je diferenciální rovnice pro které jisté numerické metody pro řešení rovnice jsou numericky nestabilní, pokud není velikost kroku považována za extrémně malou. Ukázalo se, že je obtížné formulovat přesnou definici tuhosti, ale hlavní myšlenkou je, že rovnice obsahuje některé výrazy, které mohou vést k rychlým změnám v řešení.
Při numerické integraci diferenciální rovnice by se dalo očekávat, že požadovaná velikost kroku bude v oblasti, kde křivka řešení zobrazuje mnoho variací a je relativně velký tam, kde se křivka řešení narovnává a přibližuje se k přímce se sklonem téměř nulovým. U některých problémů tomu tak není. Aby numerická metoda poskytla spolehlivé řešení diferenciálního systému, je někdy nutné, aby velikost kroku byla na nepřijatelně malé úrovni v oblasti, kde je křivka řešení velmi hladká. Tento jev je znám jako ztuhlost. V některých případech mohou existovat dva různé problémy se stejným řešením, ale jeden není tuhý a druhý ano. Fenomén tedy nemůže být vlastností přesného řešení, protože je pro oba problémy stejný, a musí být vlastnictvím samotného diferenciálního systému. Takové systémy jsou tedy známé jako tuhé systémy.
Motivující příklad

Zvažte problém počáteční hodnoty
(1)

Přesné řešení (zobrazené v azurové barvě) je
- s tak jako
(2)



Hledáme a numerické řešení který vykazuje stejné chování.
Obrázek (vpravo) ilustruje numerické problémy pro různé numerické integrátory aplikované na rovnici.
- Eulerova metoda s velikostí kroku h = 1/4 divoce osciluje a rychle opustí rozsah grafu (zobrazeno červeně).
- Eulerova metoda s poloviční velikostí kroku, h = 1/8, vytvoří řešení uvnitř hranic grafu, ale osciluje kolem nuly (zobrazeno zeleně).
- The lichoběžníková metoda (tj. dvoustupňový Adams – Moultonova metoda ) darováno
(3)


Jeden z nejvýznamnějších příkladů tuhého Obyčejné diferenciální rovnice (ODR) je systém, který popisuje chemická reakce Robertsona[1]:
(4)



Pokud někdo zachází s tímto systémem v krátkém intervalu, například v numerické integraci není problém. Pokud je však interval velmi velký (1011 řekněme), pak mnoho standardních kódů nedokáže správně integrovat.
![t in [0,40]](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2f7f3737f6e7769ce977f5368e9842c8da1b998)
Dalšími příklady jsou sady ODR vyplývající z časové integrace velkých mechanismů chemických reakcí. Zde vzniká tuhost z koexistence velmi pomalých a velmi rychlých reakcí.[Citace je zapotřebí ] K jejich vyřešení jsou softwarové balíčky KPP a Autochem může být použito.
Poměr tuhosti
Zvažte lineární konstantní koeficient nehomogenní systém
(5)

kde a je konstantní, diagonalizovatelný, matice s vlastními hodnotami (předpokládá se odlišné) a odpovídající vlastní vektory . Obecné řešení (5) má formu





(6)

kde κt jsou libovolné konstanty a je zvláštní integrál. Nyní předpokládejme, že

(7)

což znamená, že každý z těchto výrazůtak jako , takže řešení přístupy asymptoticky jako ; termín se bude monotónně rozpadat, pokud λt je reálné a sinusově, pokud λt je složité. tlumočení X být čas (jak to často bývá u fyzických problémů), se nazývá přechodné řešení a the ustálené řešení.Li je velký, pak odpovídající termín rychle se rozpadne jakoX se zvyšuje a nazývá se tedy a rychlé přechodné; -li je malý, odpovídající výraz rozpadá se pomalu a nazývá se a pomalý přechod. Nechat být definován








(8)

aby je nejrychlejší přechodný a nejpomalejší. Nyní definujeme poměr tuhosti tak jako


(9)

Charakterizace tuhosti
V této části uvažujeme o různých aspektech fenoménu tuhosti. „Fenomén“ je pravděpodobně vhodnější slovo než „vlastnost“, protože to spíše naznačuje, že tuhost lze definovat přesnými matematickými termíny; ukázalo se, že to není možné uspokojivým způsobem, dokonce ani pro omezenou třídu systémů lineárních konstantních koeficientů. Uvidíme také několik kvalitativních výroků, které lze (a většinou byly) učiněny ve snaze zapouzdřit pojem tuhosti a co je pravděpodobně nejuspokojivější z nich, uvedeme jako „definici“ tuhosti.
J. D. Lambert definuje tuhost takto:
Pokud numerická metoda s konečnou oblastí absolutních stabilita, aplikován na systém s jakýmkoli počáteční podmínky, je nucen použít v určitém intervalu integrace délku kroku, která je příliš malá ve vztahu k plynulosti přesného řešení v tomto intervalu, pak se říká, že systém je tuhý v tom intervalu.
Existují i další charakteristiky, které se projevují mnoha příklady tuhých problémů, ale pro každý z nich existují protiklady, takže tyto charakteristiky nedělají dobré definice tuhosti. Definice založené na těchto charakteristikách jsou nicméně některými autory běžně používány a jsou dobrým vodítkem ohledně přítomnosti tuhosti. Lambert je z výše uvedených důvodů označuje spíše jako „prohlášení“ než jako definice. Některé z nich jsou:
- Systém lineárních konstantních koeficientů je tuhý, pokud je celý vlastní čísla mají zápornou skutečnou část a poměr tuhosti je velký.
- K tuhosti dochází, když délka kroku omezují požadavky na stabilitu, nikoli požadavky na přesnost.
- Tuhost nastává, když se některé složky roztoku rozpadají mnohem rychleji než jiné.[3]
Etymologie
Původ pojmu „tuhost“ nebyl jednoznačně stanoven. Podle Joseph Oakland Hirschfelder se používá výraz „tuhý“, protože tyto systémy odpovídají těsnému spojení mezi řidičem a řízený v servomechanismy.[4]Podle Richarda. L. Burden a J. Douglas Faires,
Při standardu mohou nastat značné potíže numerické techniky se používají k přiblížení řešení a diferenciální rovnice když přesné řešení obsahuje podmínky formuláře Eλt, kde λ je komplexní číslo se zápornou skutečnou částí.
...
Problémy s rychle se rozpadajícími přechodnými řešeními se přirozeně vyskytují v široké škále aplikací, včetně studia pružinových a tlumicích systémů, analýzy řídicí systémy a problémy v chemická kinetika. Toto jsou všechny příklady třídy problémů zvaných tuhé (matematické tuhosti) systémy diferenciálních rovnic, kvůli jejich aplikaci při analýze pohybu pružiny a hmoty systémy mít velké jarní konstanty (fyzický ztuhlost ).[5]
Například problém počáteční hodnoty
(10)

s m = 1, C = 1001, k = 1000, lze napsat ve tvaru (5) s n = 2 a
(11)

(12)

(13)

a má vlastní čísla. Obě vlastní čísla mají zápornou skutečnou část a poměr tuhosti je

(14)

což je docela velké. Systém (10) pak určitě splňuje výroky 1 a 3. Zde je jarní konstanta k je velké a tlumení konstantní C je ještě větší.[6] (Všimněte si, že „velký“ je vágní, subjektivní výraz, ale čím větší jsou výše uvedené veličiny, tím výraznější bude účinek tuhosti.) Přesné řešení (10) je
(15)

Všimněte si, že (15) se chová téměř jako jednoduchá exponenciál X0E−t, ale přítomnost E−1000t i s malým koeficientem stačí k tomu, aby byl numerický výpočet velmi citlivý na velikost kroku. Stabilní integrace (10) vyžaduje velmi malou velikost kroku, dokud se nedostane do hladké části křivky řešení, což má za následek chybu mnohem menší, než je požadováno pro přesnost. Systém tedy splňuje i výrok 2 a Lambertovu definici.
A-stabilita
Chování numerických metod při tuhých problémech lze analyzovat použitím těchto metod na testovací rovnici y ' = ky podléhá původnímu stavu y(0) = 1 s . Řešení této rovnice je y (t) = Ekt. Toto řešení se blíží nule jako když Pokud numerická metoda také vykazuje toto chování (pro pevnou velikost kroku), pak se říká, že je A-stabilní.[7] (Všimněte si, že numerická metoda, která je stabilní L (viz níže), má silnější vlastnost, že řešení se blíží nule v jediném kroku, protože velikost kroku jde do nekonečna.) A-stabilní metody nevykazují problémy s nestabilitou, jak je popsáno v motivační příklad.



Metody Runge – Kutta
Metody Runge – Kutta aplikován na testovací rovnici mít formu , a indukcí, . Funkce se nazývá funkce stability. Podmínka tedy, že tak jako je ekvivalentní k . To motivuje k definici oblast absolutní stability (někdy označované jednoduše jako oblast stability), což je sada . Metoda je A-stabilní, pokud oblast absolutní stability obsahuje sadu , tj. levá polovina roviny.









Příklad: Eulerovy metody

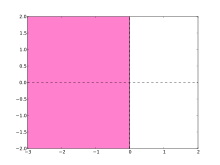
Zvažte výše uvedené Eulerovy metody. Explicitní Eulerova metoda aplikován na testovací rovnici je

Proto, s . Oblast absolutní stability pro tuto metodu je tedy což je disk zobrazený vpravo. Eulerova metoda není stabilní.



Motivující příklad měl . Hodnota z při velikosti kroku je , který je mimo oblast stability. Numerické výsledky ve skutečnosti nekonvergují k nule. S velikostí kroku , my máme který je právě uvnitř oblasti stability a číselné výsledky konvergují k nule, i když poměrně pomalu.





Příklad: Lichoběžníková metoda
Zvažte lichoběžníkovou metodu

při aplikaci na testovací rovnici , je

Řešení pro výnosy


Stabilitní funkce tedy je

a oblast absolutní stability je

Tato oblast obsahuje levou polovinu roviny, takže lichoběžníková metoda je stabilní. Ve skutečnosti je oblast stability identická s levou polovinou roviny, a tedy numerické řešení konverguje k nule, pokud a pouze pokud přesné řešení ano. Lichoběžníková metoda nicméně nemá dokonalé chování: tlumí všechny rozpadající se složky, ale rychle se rozpadající složky jsou tlumeny jen velmi mírně, protože tak jako . To vedlo ke konceptu L-stabilita: metoda je stabilní L, pokud je stabilní A a tak jako . Lichoběžníková metoda je A-stabilní, ale ne L-stabilní. The implicitní Eulerova metoda je příkladem metody L-stabilní.[8]




Obecná teorie
Stabilitní funkce a Metoda Runge – Kutta s koeficienty a darováno



kde označuje vektor jednotkami. Tohle je racionální funkce (jeden polynomiální děleno jiným).

Explicitní metody Runge – Kutta mají a přísně nižší trojúhelníkový matice koeficientu a jejich stabilitní funkce je tedy polynom. Z toho vyplývá, že explicitní metody Runge – Kutta nemohou být stabilní.
Stabilitní funkce implicitních metod Runge – Kutta je často analyzována pomocí objednat hvězdy. Řádová hvězda pro metodu se stabilizační funkcí je definována jako množina . Metoda je A-stabilní tehdy a jen tehdy, pokud její funkce stability nemá v levé rovině žádné póly a její řádová hvězda neobsahuje žádná čistě imaginární čísla.[9]

Vícestupňové metody
Lineární vícestupňové metody mít formu

Při aplikaci na testovací rovnici se stanou

které lze zjednodušit na

kde z = hk. Toto je lineární relace opakování. Metoda je stabilní, pokud všechna řešení {yn} relace opakování konverguje k nule, když Re z <0. Charakteristický polynom je

Všechna řešení konvergují k nule pro danou hodnotu z pokud všechna řešení w z Φ (z,w) = 0 leží v jednotkovém kruhu.
Oblast absolutní stability pro vícestupňovou metodu výše uvedené formy je pak množinou všech pro které všechny w takové, že Φ (z,w) = 0 uspokojit |w| <1. Opět platí, že pokud tato sada obsahuje levou poloviční rovinu, je o vícestupňové metodě řečeno, že je A-stabilní.

Příklad: Metoda Adams – Bashforth druhého řádu
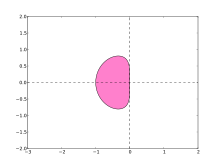
Pojďme určit oblast absolutní stability pro dvoustupňovou metodu Adams – Bashforth

Charakteristický polynom je

který má kořeny

tedy oblast absolutní stability je

Tato oblast je zobrazena vpravo. Nezahrnuje celou levou polorovinu (ve skutečnosti zahrnuje pouze skutečnou osu mezi z = -1 a z = 0), takže metoda Adams – Bashforth není stabilní.
Obecná teorie
Explicitní vícestupňové metody nikdy nemohou být stabilní, stejně jako explicitní metody Runge – Kutta. Implicitní vícestupňové metody mohou být stabilní A, pouze pokud je jejich pořadí nejvýše 2. Druhý výsledek je známý jako druhý Dahlquist bariéra; omezuje užitečnost lineárních vícestupňových metod pro tuhé rovnice. Příkladem metody A druhého řádu druhého řádu je výše uvedené lichoběžníkové pravidlo, které lze také považovat za lineární vícestupňovou metodu.[10]
Viz také
- Číslo podmínky
- Diferenciální inkluze, rozšíření pojmu diferenciální rovnice, které umožňuje diskontinuity, částečně jako způsob, jak se vyhnout některým problémům s tuhostí
- Explicitní a implicitní metody
Poznámky
- ^ Robertson, H. H. (1966). "Řešení sady rovnic reakční rychlosti". Numerická analýza: úvod. Akademický tisk. str. 178–182.
- ^ Lambert (1992 216–217)
- ^ Lambert (1992 217–220)
- ^ Hirshfelder (1963)
- ^ Burden & Faires (1993, str. 314)
- ^ Kreyszig (1972, s. 62–68)
- ^ Tato definice je způsobena Dahlquist (1963).
- ^ Definice L-stability je způsobena Ehle (1969).
- ^ Definice je způsobena Wanner, Hairer & Nørsett (1978); viz také Iserles & Nørsett (1991).
- ^ Vidět Dahlquist (1963).
Reference
- Burden, Richard L .; Faires, J. Douglas (1993), Numerická analýza (5. vydání), Boston: Prindle, Weber a Schmidt, ISBN 0-534-93219-3.
- Dahlquist, Germund (1963), "Speciální problém stability pro lineární vícestupňové metody", BIT, 3 (1): 27–43, doi:10.1007 / BF01963532, hdl:10338.dmlcz / 103497.
- Eberly, David (2008), Stabilitní analýza pro systémy diferenciálních rovnic (PDF).
- Ehle, B.L. (1969), Na Padé aproximace exponenciální funkce a A-stabilní metody pro numerické řešení problémů počáteční hodnoty (PDF), University of Waterloo.
- Gear, C. W. (1971), Numerické problémy počáteční hodnoty v obyčejných diferenciálních rovnicích, Englewoodské útesy: Prentice Hall.
- Gear, C. W. (1981), „Numerické řešení obyčejných diferenciálních rovnic: Je ještě co dělat?“, Recenze SIAM, 23 (1): 10–24, doi:10.1137/1023002.
- Hairer, Ernst; Wanner, Gerhard (1996), Řešení obyčejných diferenciálních rovnic II: Tuhé a diferenciálně-algebraické úlohy (druhé vydání), Berlín: Springer-Verlag, ISBN 978-3-540-60452-5.
- Hirshfelder, J. O. (1963), „Aplikovaná matematika používaná v teoretické chemii“, Symposium americké matematické společnosti: 367–376.
- Iserles, Arieh; Nørsett, Syvert (1991), Objednat hvězdy, Chapman & Hall, ISBN 978-0-412-35260-7.
- Kreyszig, Erwin (1972), Pokročilá inženýrská matematika (3. vyd.), New York: Wiley, ISBN 0-471-50728-8.
- Lambert, J. D. (1977), D. Jacobs (ed.), „Problém počáteční hodnoty pro obyčejné diferenciální rovnice“, Současný stav v numerické analýze, New York: Akademický tisk: 451–501.
- Lambert, J. D. (1992), Numerické metody pro běžné diferenciální systémy, New York: Wiley, ISBN 978-0-471-92990-1.
- Mathews, John; Fink, Kurtis (1992), Numerické metody využívající MATLAB.
- Stiskněte, WH; Teukolsky, SA; Vetterling, WT; Flannery, BP (2007). „Oddíl 17.5. Tuhé sady rovnic“. Numerické recepty: Umění vědecké práce na počítači (3. vyd.). New York: Cambridge University Press. ISBN 978-0-521-88068-8.
- Shampine, L. F .; Gear, C. W. (1979), „Pohled uživatele na řešení tuhých obyčejných diferenciálních rovnic“, Recenze SIAM, 21 (1): 1–17, doi:10.1137/1021001.
- Wanner, Gerhard; Hairer, Ernst; Nørsett, Syvert (1978), „Pořadí hvězd a teorie stability“, BIT, 18 (4): 475–489, doi:10.1007 / BF01932026.
- Stabilita metod Runge-Kutta [1]