Kinematický řetězec - Kinematic chain - Wikipedia



Ve strojírenství, a kinematický řetězec je sestava tuhá tělesa připojeno uživatelem klouby poskytnout omezený (nebo požadovaný) pohyb, kterým je matematický model pro mechanický systém.[1] Jako při známém používání tohoto slova řetěz, tuhá tělesa nebo odkazy jsou omezeny jejich spojením s jinými odkazy. Příkladem je jednoduchý otevřený řetězec tvořený články spojenými do série, jako je obvyklý řetězec, kterým je kinematický model pro typického robota manipulátor.[2]
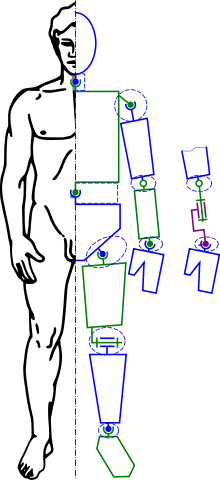
Matematické modely spojů nebo spojů mezi dvěma spoji se nazývají kinematické páry. Kinematické páry modelují kloubové a posuvné klouby zásadně robotika, často volané nižší páry a styčné body povrchu kritické pro vačky a ozubení, volala vyšší páry. Tyto spoje jsou obecně modelovány jako holonomická omezení. A kinematický diagram je schéma mechanického systému, který ukazuje kinematický řetězec.
Moderní využití kinematických řetězců zahrnuje poddajnost, která vyplývá z ohybových spojů v přesných mechanismech, poddajnost vazby v kompatibilní mechanismy a mikroelektromechanické systémy a shoda kabelů v kabelových robotech a tensegrity systémy.[3][4]
Vzorec mobility
The stupně svobody nebo mobilita, kinematického řetězce je počet parametrů, které definují konfiguraci řetězce.[2][5]Systém n tuhá tělesa pohybující se ve vesmíru mají 6n stupně volnosti měřené vzhledem k pevnému rámu. Tento rámec je zahrnut do počtu těl, takže mobilita nezávisí na spojení, které tvoří pevný rámec. To znamená míru volnosti tohoto systému M = 6(N - 1), kde N = n +1 je počet pohybujících se těles plus pevné těleso.
Spoje, které spojují těla, ukládají omezení. Konkrétně panty a posuvníky ukládají každý pět omezení, a proto odstraňují pět stupňů volnosti. Je vhodné definovat počet omezení C které kloub ukládá z hlediska svobody kloubu F, kde C = 6 − F. V případě závěsu nebo jezdce, které jsou o jeden stupeň volnosti, mají klouby F = 1 a proto C = 6 − 1 = 5.
Výsledkem je, že se vytvořila pohyblivost kinematického řetězce n pohyblivé odkazy a j spojuje každý se svobodou Fi, i = 1, ..., j, darováno

Odvolej to N zahrnuje pevné spojení.
Analýza kinematických řetězců
Omezovací rovnice kinematického řetězce spojují rozsah povoleného pohybu v každém kloubu s rozměry článků v řetězci a tvoří algebraické rovnice které jsou řešeny k určení konfigurace řetězce spojené se specifickými hodnotami vstupních parametrů, tzv stupně svobody.
Rovnice omezení pro kinematický řetězec se získají pomocí tuhé transformace [Z] charakterizuje relativní pohyb povolený u každého spoje a odděluje tuhé transformace [X] k definování rozměrů každého spoje. V případě sériového otevřeného řetězce je výsledkem posloupnost tuhých transformací, které střídají společné a spojové transformace od základny řetězu k jeho koncovému článku, což se rovná zadané poloze pro koncový článek. Řetěz n vazby zapojené do série mají kinematické rovnice,
![{ displaystyle [T] = [Z_ {1}] [X_ {1}] [Z_ {2}] [X_ {2}] cdots [X_ {n-1}] [Z_ {n}], ! }](https://wikimedia.org/api/rest_v1/media/math/render/svg/fc9b6ca53890471c968bd37375f4b48b38c97d51)
kde [T] je transformace lokalizující koncový článek - všimněte si, že řetězec obsahuje „nulový“ článek skládající se z pozemního rámu, ke kterému je připojen. Tyto rovnice se nazývají dopředná kinematika rovnice sériového řetězce.[6]
Kinematické řetězce široké škály složitosti jsou analyzovány rovnicí kinematických rovnic sériových řetězců, které tvoří smyčky uvnitř kinematického řetězce. Tyto rovnice se často nazývají smyčkové rovnice.
Složitost (z hlediska výpočtu vpřed a inverzní kinematika ) řetězu je určen následujícími faktory:
- Své topologie: sériový řetězec, a paralelní manipulátor, a strom struktura nebo graf.
- Své geometrický forma: jak sousedí klouby prostorově propojené?
Vysvětlení
Dvě nebo více tuhých těles ve vesmíru se souhrnně nazývají systém tuhých těles. Můžeme bránit pohybu těchto nezávislých tuhých těles s kinematickými omezeními. Kinematická omezení jsou omezení mezi tuhými tělesy, která vedou ke snížení stupňů volnosti systému tuhých těles.[5]
Syntéza kinematických řetězců
Omezovací rovnice kinematického řetězce lze použít obráceně k určení rozměrů vazeb ze specifikace požadovaného pohybu systému. Toto se nazývá kinematická syntéza.[7]
Snad nejrozvinutější formulace kinematické syntézy je pro čtyřbodové vazby, který je známý jako Burmesterova teorie.[8][9][10]
Ferdinand Freudenstein je často nazýván otcem moderní kinematiky pro jeho příspěvky ke kinematické syntéze vazby začátek v 50. letech. Jeho využití nově vyvinutého počítače k řešení Freudensteinova rovnice se stal prototypem počítačem podporovaný design systémy.[7]
Tato práce byla zobecněna na syntézu sférických a prostorových mechanismů.[2]
Viz také
- Assurova skupina
- Parametry Denavit – Hartenberg
- Kritérium Chebychev – Grübler – Kutzbach
- Konfigurační prostor
- Stroj (mechanický)
- Mechanismus (strojírenství)
- Spojení šesti tyčí
- Jednoduché stroje
- Šest stupňů volnosti
- Princip superpozice
Reference
- ^ Reuleaux, F., 1876 Kinematika strojů, (překlad a poznámky A. B. W. Kennedyho), dotisk Dover, New York (1963)
- ^ A b C J. M. McCarthy a G. S. Soh, 2010, Geometrický design vazeb, Springer, New York.
- ^ Larry L. Howell, 2001, Kompatibilní mechanismy, John Wiley & Sons.
- ^ Alexander Slocum, 1992, Přesný design stroje, SME
- ^ A b J. J. Uicker, G. R. Pennock a J. E. Shigley, 2003, Teorie strojů a mechanismů, Oxford University Press, New York.
- ^ J. M. McCarthy, 1990, Úvod do teoretické kinematiky, MIT Press, Cambridge, Massachusetts.
- ^ A b R. S. Hartenberg a J. Denavit, 1964, Kinematická syntéza vazeb, McGraw-Hill, New York.
- ^ Suh, C. H. a Radcliffe, C. W., Kinematika a návrh mechanismu, John Wiley and Sons, New York, 1978.
- ^ Sandor, G.N. a Erdman, A.G., 1984, AdvancedMechanismDesign: AnalysisandSynthesis, Vol. 2. Prentice-Hall, Englewood Cliffs, NJ.
- ^ Hunt, K.H., Kinematická geometrie mechanismů, Oxford Engineering Science Series, 1979