Tento článek pojednává o parametrech DH používaných v robotice. Parametry Diffie – Hellman („dhparam“) používané v kryptografii viz Výměna klíčů Diffie – Hellman.
Ve strojírenství je Parametry Denavit – Hartenberg (také zvaný Parametry DH) jsou čtyři parametry spojené s konkrétní konvencí pro připojení referenčních rámců k odkazům prostorového kinematický řetězec nebo robotický manipulátor.
Jacques Denavit a Richard Hartenberg představili tuto konvenci v roce 1955 za účelem standardizace rámců souřadnic pro prostorové vazby.[1][2]
Richard Paul prokázal svou hodnotu pro kinematickou analýzu robotických systémů v roce 1981.[3]I když již bylo vyvinuto mnoho konvencí pro připevnění referenčních rámců, konvencí Denavit – Hartenberg zůstává populární přístup.
Běžně používaná konvence pro výběr referenční rámce v robotika aplikace je Konvence Denavit a Hartenberg (D – H) který představil Jacques Denavit a Richard S.Hartenberg. V této konvenci jsou souřadnicové rámce připojeny ke spojům mezi dvěma odkazy tak, že jeden proměna je spojen s kloubem [Z] a druhý je spojen s odkazem [X]. Transformace souřadnic podél sériového robota skládajícího se z n odkazy tvoří kinematické rovnice robota,
kde [T] je transformace lokalizující koncový odkaz.
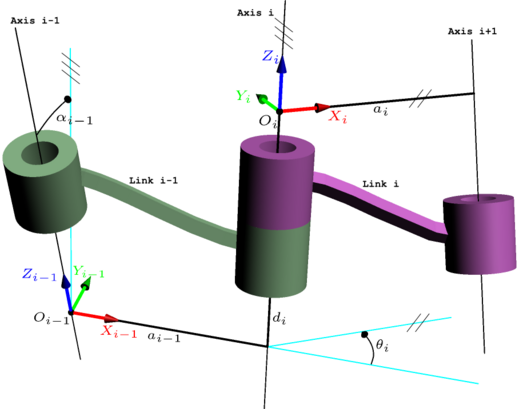
Aby bylo možné určit transformace souřadnic [Z] a [X], spoje spojující vazby jsou modelovány buď jako kloubové, nebo jako posuvné spoje, z nichž každý má jedinečnou přímku S v prostoru, která tvoří osu spoje a definuje relativní pohyb dva odkazy. Typický sériový robot se vyznačuje posloupností šesti řádků S.i, i = 1, ..., 6, jeden pro každý kloub v robotu. Pro každou posloupnost řádků Si a Si+1, existuje společná normální linka Ai,i+1. Systém šesti kloubových os Si a pět běžných normálních linií Ai,i+1 tvoří kinematickou kostru typického sériového robota se šesti stupni volnosti. Denavit a Hartenberg představili konvenci, že osám souřadnic Z jsou přiřazeny společné osy Si a souřadnicové osy X jsou přiřazeny běžným normálkám Ai,i+1.
Tato konvence umožňuje definovat pohyb vazeb kolem společné osy kloubu Si podle posunutí šroubu,
kde θi je rotace kolem a di je snímek podél osy Z - některý z parametrů může být konstantní v závislosti na struktuře robota. Podle této konvence jsou rozměry každého odkazu v sériovém řetězci definovány pomocí posunutí šroubu kolem běžného normálu Ai,i+1 ze kloubu Si na Si+1, který je dán
kde αi,i+1 a ri,i+1 definujte fyzické rozměry spoje, pokud jde o úhel měřený kolem a vzdálenost měřenou podél osy X.
Stručně řečeno, referenční rámce jsou uspořádány následovně:
the -osa je ve směru osy kloubu
the -os je rovnoběžná s běžné normální: (nebo od zn-1) Pokud neexistuje žádný jedinečný společný normál (paralelní osy) (níže) je bezplatný parametr. Směr je z na , jak je znázorněno na videu níže.
Čtyři parametry klasické konvence DH jsou zobrazeny červeně, což je . S těmito čtyřmi parametry můžeme převést souřadnice z na .
Následující čtyři transformační parametry jsou známé jako D – H parametry :.[4]
: posun oproti předchozímu do běžného normálu
: úhel asi předchozí , od starých do nového
: délka běžného normálu (aka , ale pokud používáte tuto notaci, nezaměňujte s ). Za předpokladu rotačního kloubu je to poloměr kolem předchozího .
: úhel asi běžné normální, ze starého osa do nové osa
K dispozici je vizualizace parametrizace D – H: Youtube
V rozložení rámu je určitá volba, zda předchozí osa nebo další body podél běžné normály. Druhý systém umožňuje větvení řetězů efektivněji, protože více rámců může všechny směřovat od jejich společného předka, ale v alternativním uspořádání může předek směřovat pouze k jednomu následníkovi. Takto běžně používaná notace umisťuje každý down-chain osa kolineární se společnou normálkou, čímž se získá výpočet transformace zobrazený níže.
Můžeme zaznamenat omezení vztahů mezi osami:
the -os je kolmá na obě a sekery
the -osa protíná obojí a sekery
původ kloubu je na křižovatce a
doplňuje pravostranný referenční rámec na základě a
Denavit – Hartenbergova matice
Je běžné oddělit posunutí šroubu do produktu čistého posunu podél čáry a čisté rotace kolem čáry,[5][6] aby
a
Pomocí této notace lze každý odkaz popsat pomocí a transformace souřadnic ze souběžného souřadného systému do předchozího souřadného systému.
Toto je produkt dvou posunutí šroubů „Matice spojené s těmito operacemi jsou:
To dává:
kde R je 3 × 3 submatice popisující rotaci a T je submatice 3 × 1 popisující překlad.
V některých knihách je pořadí transformace pro dvojici po sobě jdoucích rotací a překladů (například a ) je nahrazen. Protože však nezáleží na pořadí násobení matice pro takový pár, výsledek je stejný. Například: .
Použití matic Denavit a Hartenberg
Denavitova a Hartenbergova notace poskytuje standardní metodologii pro psaní kinematických rovnic manipulátoru. To je užitečné zejména pro sériové manipulátory, kde se matice používá k reprezentaci pozice (polohy a orientace) jednoho těla vzhledem k druhému.
Poloha těla s ohledem na mohou být reprezentovány poziční maticí označenou symbolem nebo
Tato matice se také používá k transformaci bodu z rámce na
Kde nahoře vlevo submatice představuje relativní orientaci dvou těl a vpravo nahoře představuje jejich relativní polohu nebo přesněji polohu těla v rámečkun - 1 reprezentovaný prvkem rámun.
Poloha těla s ohledem na tělo lze získat jako součin matic představujících pózu s ohledem na a to z s ohledem na
Důležitou vlastností matic Denavit a Hartenberg je, že inverzní je
Lze definovat další matice, které představují rychlost a zrychlení těles.[5][6]Rychlost těla s ohledem na tělo mohou být zastoupeny v rámečku maticí
kde je úhlová rychlost tělesa s ohledem na tělo a všechny komponenty jsou vyjádřeny v rámci ; je rychlost jednoho bodu těla s ohledem na tělo (tyč). Pól je bodem procházející počátkem rámu .
Matici zrychlení lze definovat jako součet časové derivace rychlosti plus rychlost na druhou
Rychlost a zrychlení v rámci bodu těla lze hodnotit jako
Je také možné to dokázat
Matice rychlosti a zrychlení se sčítají podle následujících pravidel
jinými slovy absolutní rychlost je součet rodičovské rychlosti plus relativní rychlosti; pro zrychlení je také Coriolisův termín.
Složky matic rychlosti a zrychlení jsou vyjádřeny v libovolném rámci a transformovat z jednoho snímku do druhého následujícím pravidlem
Dynamika
Pro dynamiku jsou k popisu setrvačnosti nutné tři další matice , lineární a moment hybnosti a síly a momenty aplikován na tělo.
Setrvačnost :
kde je hmota, představují polohu těžiště a členy představují setrvačnost a jsou definovány jako
Akční matice , obsahující sílu a točivý moment :
Matice hybnosti , obsahující lineární a úhlové hybnost
Všechny matice jsou reprezentovány vektorovými komponentami v určitém rámci . Transformace komponent z rámu zarámovat řídí se pravidlem
Popsané matice umožňují stručné psaní dynamických rovnic.
Newtonův zákon:
Hybnost:
První z těchto rovnic vyjadřuje Newtonův zákon a je ekvivalentem vektorové rovnice (síla stejná hmotnost krát zrychlení) plus (úhlové zrychlení ve funkci setrvačnosti a úhlové rychlosti); druhá rovnice umožňuje vyhodnocení lineárního a úhlového momentu, jsou-li známy rychlost a setrvačnost.
Upravené parametry DH
Některé knihy jako např Úvod do robotiky: Mechanika a řízení (3. vydání)[7] použít upravené parametry DH. Rozdíl mezi klasickými parametry DH a upravenými parametry DH jsou umístění připojení souřadnicového systému k odkazům a pořadí provedených transformací.
Upravené parametry DH
Ve srovnání s klasickými parametry DH jsou souřadnice rámu je kladen na osu i - 1, ne osa i v klasické DH konvenci. Souřadnice je kladen na osu i, ne osa i + 1 v klasické DH konvenci.
Dalším rozdílem je, že podle upravené konvence je transformační matice dána následujícím pořadí operací:
Tak se stává matice upravených parametrů DH
Některé knihy (např .:[8]) použití a k označení délky a zkroucení odkazu n - 1 spíše než odkazn. Jako následek, je tvořen pouze s parametry používajícími stejný dolní index.
V některých knihách je pořadí transformace pro dvojici po sobě jdoucích rotací a překladů (např a ) je nahrazen. Protože však nezáleží na pořadí násobení matice pro takový pár, výsledek je stejný. Například: .
Byly publikovány průzkumy konvencí DH a jejich rozdílů.[9][10] Vizualizaci definice parametrů DH lze snadno sledovat a porozumět pomocí pojmenovaného simulačního softwaru RoboAnalyzer.[11]
^Denavit, Jacques; Hartenberg, Richard Scheunemann (1955). "Kinematická notace pro mechanismy nižších párů na základě matic". Trans ASME J. Appl. Mech. 23: 215–221.
^Hartenberg, Richard Scheunemann; Denavit, Jacques (1965). Kinematická syntéza vazeb. Série McGraw-Hill ve strojírenství. New York: McGraw-Hill. p. 435. Archivováno z původního dne 2013-09-28. Citováno 2012-01-13.
^Spong, Mark W .; Vidyasagar, M. (1989). Dynamika a řízení robota. New York: John Wiley & Sons. ISBN9780471503521.
^ AbLegnani, Giovanni; Casolo, Federico; Righettini, Paolo; Zappa, Bruno (1996). "Homogenní maticový přístup k 3D kinematice a dynamice - I. teorie". Mechanismus a teorie strojů. 31 (5): 573–587. doi:10.1016 / 0094-114X (95) 00100-D.
^ AbLegnani, Giovanni; Casolo, Federico; Righettini, Paolo; Zappa, Bruno (1996). „Homogenní maticový přístup k 3D kinematice a dynamice - II. Aplikace na řetězy tuhých těles a sériových manipulátorů“. Mechanismus a teorie strojů. 31 (5): 589–605. doi:10.1016 / 0094-114X (95) 00101-4.
^John J. Craig, Introduction to Robotics: Mechanics and Control (3. vydání) ISBN 978-0201543612
^Lipkin, Harvey (2005). „Poznámka k zápisu Denavit – Hartenberg v robotice“. Svazek 7: 29. Konference o mechanismech a robotice, části A a B.. 2005. 921–926. doi:10.1115 / DETC2005-85460. ISBN0-7918-4744-6.

![{ displaystyle [T] = [Z_ {1}] [X_ {1}] [Z_ {2}] [X_ {2}] ldots [X_ {n-1}] [Z_ {n}] [X_ { n}], !}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aeea711b030b5140bf08f1462e96c6cf56006a81)
![[Z_ {i}] = { begin {bmatrix} cos theta _ {i} & - sin theta _ {i} & 0 & 0 sin theta _ {i} & cos theta _ {i } & 0 & 0 0 & 0 & 1 & d_ {i} 0 & 0 & 0 & 1 end {bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ad00713a45a76d0f28944228911f169096cac95)
![[X_ {i}] = { begin {bmatrix} 1 & 0 & 0 & r _ {{i, i + 1}} 0 & cos alpha _ {{i, i + 1}} & - sin alpha _ {{i , i + 1}} & 0 0 & sin alpha _ {{i, i + 1}} & cos alpha _ {{i, i + 1}} & 0 0 & 0 & 0 & 1 end {bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/b86a6ac69c0311b8a59ae3837c0eb91502e1e7b0)




















![[Z_ {i}] = operatorname {Trans} _ {{Z _ {{i}}}} (d_ {i}) operatorname {Rot} _ {{Z _ {{i}}}} ( theta _ { i}),](https://wikimedia.org/api/rest_v1/media/math/render/svg/acd112611a35f4af4eb7cbc7b1d146640e544675)
![[X_ {i}] = operatorname {Trans} _ {{X_ {i}}} (r _ {{i, i + 1}}) operatorname {Rot} _ {{X_ {i}}} ( alfa _ {{i, i + 1}}).](https://wikimedia.org/api/rest_v1/media/math/render/svg/158713cb1ead932df740dd529cebcdd2b963cbc9)

![operatorname {Trans} _ {z_ {n - 1}} (d_n)
=
vlevo, odjet[
begin {pole} {ccc | c}
1 a 0 a 0 a 0
0 a 1 a 0 a 0
0 & 0 & 1 & d_n
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/53384aa30ff82a2b85f6433f9cc439b9fecfa719)
![operatorname {Rot} _ {z_ {n - 1}} ( theta_n)
=
vlevo, odjet[
begin {pole} {ccc | c}
cos theta_n & - sin theta_n & 0 a 0
sin theta_n & cos theta_n & 0 & 0
0 a 0 a 1 a 0
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f6829532da2c9b95b7838686240621a281d066b)
![operatorname {Trans} _ {x_n} (r_n)
=
vlevo, odjet[
begin {pole} {ccc | c}
1 & 0 & 0 & r_n
0 a 1 a 0 a 0
0 a 0 a 1 a 0
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/32b9c367824bbe1639372c2a4805c99efd967a5f)
![operatorname {Rot} _ {x_n} ( alpha_n)
=
vlevo, odjet[
begin {pole} {ccc | c}
1 a 0 a 0 a 0
0 & cos alpha_n & - sin alpha_n & 0
0 & sin alpha_n & cos alpha_n & 0
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/6323ca441a702b252b2d8521dde3ae9c1aa6b662)
![operatorname {} ^ {n - 1} T_n
=
vlevo, odjet[
begin {pole} {ccc | c}
cos theta_n & - sin theta_n cos alpha_n & sin theta_n sin alpha_n & r_n cos theta_n
sin theta_n & cos theta_n cos alpha_n & - cos theta_n sin alpha_n & r_n sin theta_n
0 & sin alpha_n & cos alpha_n & d_n
hline
0 a 0 a 0 a 1
end {pole}
že jo]
=
vlevo, odjet[
begin {pole} {ccc | c}
& & &
& R & T
& & &
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/6963d0c47a3a894ff0719c8df348d188b996074e)







![{ displaystyle M_ {n-1, n} = left [{ begin {array} {ccc | c} R_ {xx} & R_ {xy} & R_ {xz} & T_ {x} R_ {yx} & R_ { yy} & R_ {yz} & T_ {y} R_ {zx} & R_ {zy} & R_ {zz} & T_ {z} hline 0 & 0 & 0 & 1 end {array}} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d2b6bdf3074d61dcd61ae2d946bef0aaf151841a)






![M ^ {- 1} =
vlevo, odjet[
begin {pole} {ccc | c}
& & &
& R ^ T & & -R ^ T T
& & &
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/882df2d7cbe95a1b08c0fc516b7e2d247cf5f84d)



![W_ {i, j (k)} = left [ begin {array} {ccc | c} 0 & - omega_z & omega_y & v_x omega_z & 0 & - omega_x & v_y - omega_y & omega_x & 0 & v_z
hline
0 a 0 a 0 a 0 end {array} right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e502f568baa4e4d91f1733ea1f5f2ec0d0d41b42)














![{ displaystyle J = left [{ begin {array} {ccc | c} I_ {xx} & I_ {xy} & I_ {xz} & x_ {g} m I_ {yx} & I_ {yy} & I_ {yz} & y_ {g} m I_ {zx} & I_ {zy} & I_ {zz} & z_ {g} m hline x_ {g} m & y_ {g} m & z_ {g} m & m end {pole}} vpravo] }](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e4d57dfa7fdd307bc63672a6c3c467edf6b76c3)







![Phi = left [{ begin {array} {ccc | c} 0 & -t_ {z} & t_ {y} & f_ {x} t_ {z} & 0 & -t_ {x} & f_ {y} - t_ {y} & t_ {x} & 0 & f_ {z} hline -f_ {x} & - f_ {y} & - f_ {z} & 0 end {array}} right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/4368085c58c6e9ab64b78ecbb7cca5e33b54f820)


![Gamma = left [ begin {array} {ccc | c} 0 & - gamma_z & gamma_y & rho_x gamma_z & 0 & - gamma_x & rho_y - gamma_y & gamma_x & 0 & rho_z
hline
- rho_x & - rho_y & - rho_z & 0 end {pole} vpravo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/73128fb4771872bdccff6c51dc5af41a17610bff)









![operatorname {} ^ {n - 1} T_n
=
vlevo, odjet[
begin {pole} {ccc | c}
cos theta_n & - sin theta_n & 0 & a_ {n-1}
sin theta_n cos alpha_ {n-1} & cos theta_n cos alpha_ {n-1} & - sin alpha_ {n-1} & -d_n sin alpha_ {n-1}
sin theta_n sin alpha_ {n-1} & cos theta_n sin alpha_ {n-1} & cos alpha_ {n-1} & d_n cos alpha_ {n-1}
hline
0 a 0 a 0 a 1
end {pole}
že jo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c871f4e80e3c6be1cebb018cfb71de2f12e9e340)



