Mechanismus (strojírenství) - Mechanism (engineering)

v inženýrství, a mechanismus je přístroj který transformuje vstupní síly a pohyb na požadovanou sadu výstupních sil a pohybu. Mechanismy obecně sestávají z pohyblivých komponent, které mohou zahrnovat:
- ozubená kola a soukolí
- Pás a řetězové pohony
- Vačka a následovníci
- Vazba
- Třecí zařízení, jako např brzdy a spojky
- Konstrukční prvky, jako je rám, spojovací prvky, ložiska, pružiny, maziva
- Rozličný prvky stroje, jako jsou splajny, špendlíky a klíče.
Německý vědec Reuleaux poskytuje definici „stroj je kombinací odolných těles tak uspořádaných, že jejich prostředky mohou být mechanickými silami přírody přinuceny k práci doprovázené určitým rozhodným pohybem.“ V této souvislosti jeho použití stroj se obecně vykládá ve smyslu mechanismus.
Kombinace síly a pohybu definuje Napájení a mechanismus řídí energii k dosažení požadované sady sil a pohybu.
Mechanismus je obvykle součástí většího procesu nebo mechanický systém. Někdy celý stroj lze označit jako mechanismus. Příklady jsou mechanismus řízení v auto, nebo navíjecí mechanismus a náramkové hodinky.Více mechanismů jsou stroje.
Kinematické páry
Viz také: Kinematický pár
Od doby Archimedes během renesance byly mechanismy považovány za konstruované z jednoduché stroje, tak jako páka, kladka, šroub, kolo na hřídeli, klín, a nakloněná rovina. Reuleaux se zaměřil na těla, tzv Odkazya spojení mezi těmito těly kinematické páry nebo klouby.
Chcete-li ke studiu pohybu mechanismu použít geometrii, jsou její vazby modelovány jako tuhá tělesa. To znamená, že se předpokládá, že se vzdálenosti mezi body ve spoji nezmění, protože se mechanismus pohybuje, tj. Spoj se neohne. Relativní pohyb mezi body ve dvou spojených vazbách je tedy považován za výsledek kinematické dvojice, která je spojuje.
Kinematické páry nebo klouby se považují za ideální omezení mezi dvěma vazbami, jako je omezení jednoho bodu pro čistou rotaci nebo omezení čáry pro čisté klouzání, stejně jako čisté válcování bez prokluzu a bodový kontakt s uklouznutím . Mechanismus je modelován jako sestava tuhých vazeb a kinematických párů.

Odkazy a spoje
Reuleaux nazval ideální spojení mezi odkazy kinematické páry. Rozlišoval mezi vyššími páry s liniovým kontaktem mezi dvěma články a nižšími páry s oblastním kontaktem mezi odkazy. J. Phillips ukazuje, že existuje mnoho způsobů, jak konstruovat páry, které se nehodí k tomuto jednoduchému modelu.
Dolní pár: Dolní pár je ideální spoj, který má povrchový kontakt mezi dvojicí prvků, jako v následujících případech:
- Revoluční pár nebo kloubový kloub vyžaduje, aby čára v pohybujícím se tělese zůstala kolineární s přímkou v pevném tělese a rovina kolmá na tuto přímku v pohyblivém tělese musí udržovat kontakt s podobnou kolmou rovinou v pevném tělese tělo. To ukládá pět omezení relativního pohybu článků, což má tedy jeden stupeň volnosti.
- Prizmatický kloub nebo jezdec vyžaduje, aby přímka v pohybujícím se těle zůstala kolineární s přímkou v pevném tělese a rovina rovnoběžná s touto přímkou v pohyblivém tělese musí udržovat kontakt s podobnou rovnoběžnou rovinou v pevném tělese . To ukládá pět omezení relativního pohybu článků, což má tedy jeden stupeň volnosti.
- Válcový kloub vyžaduje, aby přímka v pohybujícím se těle zůstala kolineární s přímkou v pevném tělese. Kombinuje otočný kloub a kluzný kloub. Tento kloub má dva stupně volnosti.
- Sférický kloub nebo kulový kloub vyžaduje, aby bod v pohybujícím se těle udržoval kontakt s bodem v pevném těle. Tento kloub má tři stupně volnosti.
- Rovinný spoj vyžaduje, aby rovina v pohybujícím se těle udržovala kontakt s rovinou v pevném tělese. Tento kloub má tři stupně volnosti.
- Šroubový nebo šroubovitý kloub má pouze jeden stupeň volnosti, protože posuvné a rotační pohyby souvisejí s úhlem šroubovice závitu.
Vyšší páry: Obecně platí, že vyšší pár je omezení, které vyžaduje přímkový nebo bodový kontakt mezi povrchy elementů. Například kontakt mezi vačkou a jejím následovníkem je vyšší pár zvaný a vačkový kloub. Podobně kontakt mezi evolventními křivkami, které tvoří záběru zubů dvou ozubených kol, jsou vačkové klouby.
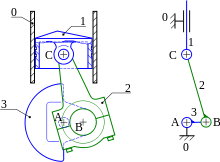
Kinematický diagram
A kinematický diagram redukuje součásti stroje na kostrový diagram, který zdůrazňuje klouby a snižuje vazby na jednoduché geometrické prvky. Tento diagram lze také formulovat jako a graf reprezentací vazeb mechanismu jako hran a spojů jako vrcholů grafu. Tato verze kinematického diagramu se osvědčila při výčtu kinematických struktur v procesu konstrukce stroje.[1]
Důležitým hlediskem v tomto procesu návrhu je stupeň svobody systému spojů a spojů, který se určuje pomocí Kritérium Chebychev – Grübler – Kutzbach.

Rovinné mechanismy
I když jsou všechny mechanismy v mechanickém systému trojrozměrné, lze je analyzovat pomocí rovinná geometrie, pokud je pohyb jednotlivých komponent omezen, takže všechny trajektorie bodů jsou rovnoběžné nebo v sériovém spojení s rovinou. V tomto případě se systém nazývá a rovinný mechanismus. Kinematická analýza rovinných mechanismů využívá podmnožinu speciální euklidovské skupiny SE, skládající se z rovinných rotací a překladů, označují SE.
Skupina SE je trojrozměrná, což znamená, že každá poloha těla v rovině je definována třemi parametry. Parametry jsou často souřadnice x a y počátku souřadnicového rámce v M měřené od počátku souřadnicového rámu v F a úhel měřený od osy x ve F k ose x v M. To je často popisováno říkat tělo v letadle má tři stupně svobody.
Čistou rotaci závěsu a lineární posunutí posuvníku lze identifikovat u podskupin SE a definovat dva klouby jeden stupeň volnosti kloubů rovinných mechanismů. Vačkový kloub tvořený dvěma povrchy v kluzném a rotačním kontaktu je kloubem se dvěma stupni volnosti.
Vidět Theo Jansen's Strandbeest vycházkový stroj s nohama zkonstruovaný z rovinných osmi tyčí
Ve španělském mechanismu jsou „mecanismos“
Sférické mechanismy
Je možné zkonstruovat mechanismus tak, aby trajektorie bodů ve všech složkách ležely v soustředných kulových skořápkách kolem pevného bodu. Příkladem je kardanový gyroskop. Tato zařízení se nazývají sférické mechanismy.[2] Sférické mechanismy jsou konstruovány spojením článků s kloubovými spoji tak, že osy každého závěsu procházejí stejným bodem. Tento bod se stává středem soustředných sférických skořápek. Pohyb těchto mechanismů je charakterizován skupinou SO (3) rotací v trojrozměrném prostoru. Dalšími příklady sférických mechanismů jsou automobilový diferenciál a robotické zápěstí.
Vyberte tento odkaz pro animaci a Kulový nasazovací mechanismus.

The rotační skupina SO (3) je trojrozměrný. Příkladem tří parametrů, které určují prostorovou rotaci, jsou úhly natočení, stoupání a vybočení slouží k definování orientace letadla.
Prostorové mechanismy

Mechanismus, při kterém se tělo pohybuje obecným prostorovým pohybem, se nazývá a prostorový mechanismus. Příkladem je vazba RSSR, kterou lze považovat za čtyřprutovou vazbu, ve které jsou kloubové spoje spojovacího článku nahrazeny konce tyčí, nazývané také sférické klouby nebo Kulové klouby. Konce tyčí umožňují, aby vstupní a výstupní kliky vazby RSSR byly nesprávně vyrovnány do té míry, že leží v různých rovinách, což způsobí, že se spojovací článek bude pohybovat obecným prostorovým pohybem. Robotická ramena, Stewartovy platformy, a humanoidní robotické systémy jsou také příklady prostorových mechanismů.
Bennettova vazba je příkladem prostorového přetěžovaný mechanismus, který je vyroben ze čtyř kloubových spojů.
Skupina SE (3) je šestrozměrný, což znamená, že poloha těla v prostoru je definována šesti parametry. Tři z parametrů definují počátek pohybujícího se referenčního snímku vzhledem k pevnému rámci. Tři další parametry definují orientaci pohyblivého rámečku vzhledem k pevnému rámečku.
Vazby

A vazba je sbírka odkazů spojených klouby. Spoje jsou obecně konstrukčními prvky a spoje umožňují pohyb. Snad nejužitečnějším příkladem je rovinný čtyřbodová vazba. Existuje však mnohem více speciálních propojení:
- Wattova vazba je vazba se čtyřmi pruhy, která generuje přibližnou přímku. To bylo rozhodující pro fungování jeho konstrukce pro parní stroj. Toto spojení se objevuje také v zavěšeních vozidel, aby se zabránilo bočním pohybům karoserie vzhledem ke kolům. Viz také článek Paralelní pohyb.
- Úspěch Wattovy vazby vedl k návrhu podobných přibližných přímých vazeb, jako např Hoekenova vazba a Čebyševovo spojení.
- The Peaucellierova vazba generuje skutečný přímý výstup z rotačního vstupu.
- The Sarrusovo spojení je prostorová vazba, která generuje přímkový pohyb z rotačního vstupu.
- The Klann spojení a Jansenova vazba jsou nedávné vynálezy, které poskytují zajímavé pohyby při chůzi. Jsou respektive a šest barů a vazba osm barů.
Kompatibilní mechanismy
A kompatibilní mechanismus je řada tuhých těles propojených kompatibilními prvky. Tyto mechanismy mají mnoho výhod, včetně sníženého počtu dílů, sníženého „sklonu“ mezi klouby (bez parazitního pohybu kvůli mezerám mezi částmi), skladování energie, nízké údržby (nevyžadují mazání a nízké mechanické opotřebení) a snadnost výroby [3].
Ohybná ložiska (také známý jako ohýbejte klouby) jsou podmnožinou kompatibilních mechanismů, které po aplikaci síly produkují geometricky přesně definovaný pohyb (rotaci).
Vačkové a sledovací mechanismy
A vačka a následovník je tvořen přímým kontaktem dvou speciálně tvarovaných článků. Hnací článek se nazývá vačka (viz také vačková hřídel ) a odkaz, který je poháněn přímým kontaktem jejich povrchů, se nazývá následovník. Tvar kontaktních povrchů vačka a následovník určuje pohyb mechanismu. Obecně se energie mechanismu sledovače vačky přenáší z vačky na sledovač. Vačkový hřídel se otáčí a podle profilu vačky se sledovač pohybuje nahoru a dolů. Nyní jsou také k dispozici mírně odlišné typy excentrických sledovačů vaček, ve kterých se energie přenáší z sledovače do vačky. Hlavní výhodou tohoto typu mechanismu sledovače vačky je to, že se sledovač trochu pohybuje a pomáhá otáčet vačkou 6krát větší délku obvodu se 70% silou.
Převody a soukolí

Přenos otáčení mezi kontaktujícími ozubenými koly lze vysledovat zpět do Antikythera mechanismus Řecka a jih směřující vůz Číny. Ilustrace renesančního vědce Georgius Agricola zobrazit soukolí s válcovými zuby. Provádění evolventní zub přineslo standardní konstrukci převodovky, která poskytuje konstantní rychlostní poměr. Některé důležité vlastnosti ozubených kol a převodových soukolí jsou:
- Poměr roztečných kružnic spojovacích zařízení definuje rychlostní poměr a mechanická výhoda soukolí.
- A planetové soukolí poskytuje vysokou redukci převodových stupňů v kompaktním balení.
- Je možné navrhnout ozubení pro ozubená kola, která jsou nekruhový, přesto přenášejte točivý moment plynule.
- Poměry rychlosti řetěz a řemenové pohony jsou počítány stejným způsobem jako převodové poměry. (Vidět ozubení kola.)
Syntéza mechanismu
Konstrukce mechanismů k dosažení konkrétního pohybu a přenosu síly je známá jako kinematická syntéza mechanismů.[4] Jedná se o soubor geometrických technik, které poskytují rozměry vazeb, vačkových a sledovacích mechanismů a převodů a soukolí k provedení požadovaného mechanického pohybu a přenosu síly.[5]
Viz také
- Převodovka
- Propojení (mechanické)
- Stroj (mechanický)
- Mechanický systém
- Mechanické hodinky
- Přehled strojů
- Virtuální práce
- Hobermanův mechanismus
Reference
- ^ Lung-Wen Tsai, 2001, Návrh mechanismu: výčet kinematických struktur podle funkce, CRC Stiskněte
- ^ J. M. McCarthy a G. S. Soh, Geometrický design vazeb, 2. vydání, Springer 2010
- ^ "Mechanismy vyhovující | O mechanismech vyhovujících". vyhovující mechanismy. Citováno 2019-02-08.
- ^ Hartenberg, R.S. a J. Denavit (1964) Kinematická syntéza vazeb, New York: McGraw-Hill - online odkaz z Cornell University.
- ^ J. J. Uicker, G. R. Pennock a J. E. Shigley, Teorie strojů a mechanismů, páté vydání, Oxford University Press, 2016.
externí odkazy
- Vyvážený mechanismus páky závěsu
- 507 mechanických pohybů publikace z roku 1908 od Henryho T. Browna
- Stroje a mechanismy Wiki
- Kinematické modely pro designovou digitální knihovnu (KMODDL) sbírky filmů a fotografií stovek modelů mechanismů.
- Šestičlenná přímá vazba ve sbírce modelů Reuleaux na Cornell University
- Animace různých mechanismů.
- Příklad šestibarového funkčního generátoru, který vypočítává úhel pro daný rozsah.
- Různé animace propojení.
- Různé provedení tyče se šesti pruhy.