Hayabusa2 - Hayabusa2 - Wikipedia
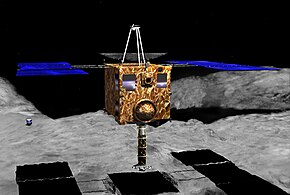
 Umělecký dojem Hayabusa2 střílející iontové trysky | |
| Typ mise | Asteroid vzorek-návrat |
|---|---|
| Operátor | JAXA |
| ID COSPARU | 2014-076A |
| SATCAT Ne. | 40319 |
| webová stránka | www |
| Doba trvání mise | 6 let (Uplynulo 6 let a 15 dní) |
| Vlastnosti kosmické lodi | |
| Výrobce | NEC [1] |
| Odpalovací mše | 610 kg (1340 lb) |
| Suchá hmota | 490 kg (1080 lb) [2] |
| Rozměry | Kosmická loď autobus: 1 × 1,6 × 1,25 m (3 ft 3 v × 5 ft 3 v × 4 ft 1 v) Solární panel: 6 m × 4,23 m (19,7 ft × 13,9 ft) |
| Napájení | 2,6 kW (při 1 au ), 1,4 kW (při 1,4 au) |
| Začátek mise | |
| Datum spuštění | 3. prosince 2014, 04:22 UTC [3] |
| Raketa | H-IIA 202 |
| Spusťte web | Vesmírné centrum Tanegashima, POLOŽIT |
| Dodavatel | Mitsubishi |
| Konec mise | |
| Datum přistání | Kapsle pro opětovný vstup: 5. prosince 2020 UTC [4] |
| Místo přistání | Woomera, Austrálie |
| Průlet kolem Země | |
| Nejbližší přístup | 3. prosince 2015 |
| Vzdálenost | 3 090 km (1 920 mil) [5] |
| Setkat se s (162173) Ryugu | |
| Den příjezdu | 27. června 2018, 09:35 UTC [6] |
| Datum odletu | 12. listopadu 2019 [7] |
| Hmotnost vzorku | 5.4 gramů |
| (162173) Ryugu přistávací modul | |
| Datum přistání | 21. února 2019 |
| (162173) Ryugu přistávací modul | |
| Datum přistání | 11. července 2019 |
| Průlet kolem Země (Ukázka vrácení) | |
| Nejbližší přístup | 5. prosince 2020 UTC [4] |
Hayabusa2 (japonský: さ や ぶ さ 2, "Sokol stěhovavý 2") je asteroid ukázková návratová mise provozovaná japonskou státní vesmírnou agenturou JAXA. Je to nástupce Hayabusa mise, která v červnu 2010 poprvé vrátila vzorky asteroidů.[8] Hayabusa2 byla zahájena dne 3. prosince 2014 a setkal se ve vesmíru s blízko Země asteroid 162173 Ryugu dne 27. června 2018.[9] Zkoumala asteroid rok a půl a odebírala vzorky. V listopadu 2019 opustil asteroid a 5. prosince 2020 UTC vrátil vzorky na Zemi.[7][10][11][12]
Hayabusa2 nese několik vědeckých užitečných zátěží pro dálkový průzkum, vzorkování a čtyři malé rovery, které zkoumají povrch asteroidů a analyzují environmentální a geologický kontext shromážděných vzorků.
Přehled mise


Asteroid 162173 Ryugu (dříve označeno 1999 JU3) je primitivní uhlíkatý blízkozemský asteroid. Předpokládá se, že uhlíkové asteroidy zachovávají nejvíce nedotčené a neznečištěné materiály sluneční soustavy, směs minerálů, ledu a organické sloučeniny které na sebe vzájemně působí.[13] Při studiu se očekává, že poskytne další znalosti o původu a vývoji vnitřních planet, zejména o původu vody a organických sloučenin na Zemi,[13][14] vše relevantní pro původ života na Zemi.[15]
Spuštění bylo původně plánováno na 30. listopadu 2014,[16][17][18] ale bylo odloženo na 3. prosince 2014 v 04:22:04 UTC (3. prosince 2014, 13:22:04 místního času) v H-IIA nosná raketa.[19] Hayabusa2 zahájeno společně s PROCYON průlet vesmírné sondy asteroidů. Posláním PROCYONU bylo selhání. Hayabusa2 dorazil do Ryugu dne 27. června 2018,[9] kde zkoumala asteroid rok a půl a shromažďovala vzorky.[13] V listopadu 2019 opustil asteroid a v prosinci 2020 vrátil vzorky na Zemi.[18]
Ve srovnání s předchozím Hayabusa mise, byly vylepšeny funkce kosmické lodi iontové motory, naváděcí a navigační technologie, antény a ovládání postoje systémy.[20] Kinetický penetrátor (tj. Kulka) byl vystřelen do povrchu asteroidu, aby odhalil původní materiál vzorku, který byl později shromážděn pro návrat na Zemi.[14][18]
Financování a historie
Po počátečním úspěchu Hayabusa, JAXA začala studovat potenciální nástupnickou misi v roce 2007.[21] V červenci 2009 představil Makoto Yoshikawa ze společnosti JAXA návrh s názvem „Následné návratové mise asteroidů Hayabusa“. V srpnu 2010 získala společnost JAXA souhlas japonské vlády s zahájením vývoje Hayabusa2. Náklady na projekt odhadované v roce 2010 činily 16,4 miliardy jenů (AMERICKÉ DOLARY$ 150 milionů).[8][22]
Hayabusa2 byl vypuštěn 3. prosince 2014, dorazil k asteroidu Ryugu 27. června 2018 a zůstal stát ve vzdálenosti asi 20 km (12 mi), aby mohl studovat a mapovat asteroid. V týdnu od 16. července 2018 byly zaslány povely k přesunu do nižší vznášející se nadmořské výšky.[23]
Dne 21. Září 2018 Hayabusa2 kosmická loď vysunula první dva rovery, Rover-1A (HIBOU)[24] a Rover-1B (OWL), z výšky asi 55 m (180 stop), která nezávisle klesla na povrch asteroidu.[25][26] Fungovaly nominálně a přenášely data.[27] Rover MASCOT se úspěšně nasadil 3. října 2018 a fungoval podle plánu přibližně 16 hodin.[28]
První sběr vzorků měl být zahájen koncem října 2018, ale rovery narazily na krajinu s velkými a malými balvany, ale bez povrchové půdy pro odběr vzorků. Proto bylo rozhodnuto odložit plány odběru vzorků na rok 2019 a dále vyhodnotit různé možnosti přistání.[29][30] První vyhledávání povrchových vzorků proběhlo 21. února 2019. 5. dubna 2019 Hayabusa2 uvolnil nárazové těleso a vytvořil umělý kráter na povrchu asteroidu. Nicméně, Hayabusa2 původně se nepodařilo 14. května 2019 upustit speciální reflexní značky nezbytné na povrch pro vedení procesu sestupu a odběru vzorků,[31] ale později úspěšně dne 4. června 2019 jednu z výšky 9 m (30 ft) upustil.[32] Podpovrchový odběr vzorků se uskutečnil 11. července 2019.[33] Kosmická loď opustila asteroid dne 13. listopadu 2019 (s příkazem k odletu zaslaným v 13:05 UTC dne 13. listopadu 2019). Úspěšně dodala vzorky zpět na Zemi 6. prosince 2020 (JST) a obsah padala padákem do speciálního kontejneru na místě v jižní Austrálii. Vzorky byly získány ve stejný den pro bezpečný transport zpět do laboratoří JAXA v Japonsku.[7][34][35]
Kosmická loď
| Hayabusa2 | Výkon[36][37] |
|---|---|
| Pohon | μ10 iontový propeler |
| Počet trysek | 4 (jeden je rezervní) |
| Celkový tah (iontový pohon) | 28 mN |
| Specifický impuls (Jásp) | 3000 sekund |
| Akcelerace | 49 μm / s2 |
| Napájení | 1250 W. |
| Vlhká hmota kosmické lodi | 610 kg |
| Systém iontových motorů suchá hmota | 66 kg |
| Systém iontových motorů mokrá hmota | 155 kg |
| Solární pole | 23 kg |
| Xenon pohonná hmota | 66 kg |
| Hydrazin / MON-3 pohonná látka | 48 kg |
| Tah (chemická paliva) | 20 N |
Návrh Hayabusa2 je založen na prvním Hayabusa kosmická loď, s některými vylepšeními.[13][38] Má hmotnost 610 kilogramů (1 340 lb) včetně paliva,[38] a elektrická energie je generována dvěma sadami solární pole s výkonem 2,6 kW při 1 AU a 1,4 kW při 1,4 AU.[38] Energie je uložena v jedenácti řadových 13,2 Ah lithium-iontové baterie.[38]
- Pohon
Kosmická loď má čtyři solární elektrické iontové trysky pro pohon zvané μ10,[36] jedním z nich je záloha. Tyto motory používají mikrovlnné trouby převést xenon do plazma (ionty), které se zrychlují působením napětí z solární panely a vysunul zadní část motoru. Současný provoz tří motorů vytváří tahy až 28 mN.[38] Ačkoli je tento tah velmi malý, motory jsou také extrémně účinné; 66 kg (146 lb) xenon[36] reakční hmota může změnit rychlost kosmické lodi až o 2 km / s.[38]
Kosmická loď má čtyři zbytečné reakční kola a chemikálie systém řízení reakce s dvanácti tryskami pro ovládání postoje (orientace) a orbitální ovládání asteroidu.[36][38] Používají se chemické trysky hydrazin a PO-3 s celkovou hmotností 48 kg (106 lb) chemického paliva.[38]
- Sdělení
Primární dodavatel NEC postavil kosmickou loď 590 kg (1300 lb), její Ka-band komunikační systém a střední infračervená kamera.[39] Kosmická loď má dvě směrové antény s vysokým ziskem pro Pásmo X. a K.A-kapela.[36] Bitové rychlosti jsou 8 bit / s až 32 kbit / s.[38] Pozemní stanice jsou Usuda Deep Space Center, Vesmírné centrum Uchinoura, Síť NASA Deep Space a Nádraží Malargüe (ESA ).[38]
- Navigace
Optický navigační kamerový dalekohled (ONC-T) je teleskopická rámovací kamera se sedmi barvami pro optickou navigaci kosmické lodi.[40] Funguje v synergii s širokoúhlou optickou kamerou (ONC-W2) a se dvěma sledovače hvězd.[38]
Aby mohl sestoupit na povrch asteroidů, aby provedl vzorkování, vypustila kosmická loď jeden z pěti cílových značek ve vybraných přistávacích zónách jako umělé vodicí značky s vysoce reflexním vnějším materiálem, který je rozpoznán zábleskovým světlem namontovaným na kosmické lodi.[38] Kosmická loď také použila svůj laserový výškoměr a rozsah (LIDAR ) a také senzory GCP-NAV (Ground Control Point Navigation) během vzorkování.[38]
Věda užitečné zatížení

The Hayabusa2 užitečné zatížení je vybaveno několika vědeckými nástroji:[38][41]
- Dálkový průzkum Země: Optická navigační kamera (ONC-T, ONC-W1, ONC-W2), blízká infračervená kamera (NIR3), termální infračervená kamera (TIR), detekce a dosah světla (LIDAR)
- Vzorkování: Zařízení pro odběr vzorků (SMP), Malý nárazový nárazník (SCI), Nasazitelná kamera (DCAM3)
- Čtyři vozítka: Mobile Asteroid Surface Scout (MASCOT), Rover-1A, Rover-1B, Rover-2.
Dálkový průzkum Země
Optické navigační kamery (ONC) byly použity pro navigaci kosmických lodí během přiblížení asteroidů a přiblížení. Také vzdáleně zobrazovali povrch, aby ho hledali meziplanetární prach kolem asteroidu. ONC-T je teleobjektiv se zorným polem 6,35 ° × 6,35 ° a několika optické filtry nesen v kolotoči. ONC-W1 a ONC-W2 jsou širokoúhlé (65,24 ° × 65,24 °) panchromatický (485–655 nm) kamery s nadir respektive šikmé pohledy.[38]
Spektrometr blízkého infračerveného záření (NIRS3) je a spektrograf pracující na vlnové délce 1,8–3,2 μm. NIRS3 byl použit pro analýzu povrchového minerálního složení.[38]
Termální infračervená kamera (TIR) je a tepelné infračervené kamera pracující na 8–12 μm, pomocí dvourozměrné mikrobolometr pole. Jeho prostorové rozlišení je 20 m na vzdálenost 20 km nebo 5 cm na vzdálenost 50 m (70 stop na 12 mil nebo 2 palce na 160 stop). To bylo používáno ke stanovení povrchových teplot v rozmezí -40 až 150 ° C (-40 až 302 ° F).[38]
Detekce světla a rozsah (LIDAR ) měřil vzdálenost od kosmické lodi k povrchu asteroidu měřením odraženého laserového světla. Je provozován v nadmořské výšce mezi 30 m a 25 km (100 ft a 16 mi).[38]
Když byla kosmická loď během operace vzorkování blíže k povrchu než 30 m (98 ft), byly k měření vzdálenosti a polohy (orientace) kosmické lodi vzhledem k lodi použity laserové dálkoměry (LRF-S1, LRF-S3) terénu.[42][43] LRF-S2 monitoroval vzorkovací roh, aby spustil vzorkovací projektil.
Údaje LIDAR a ONC jsou kombinovány za účelem stanovení podrobností topografie (rozměry a tvar) asteroidu. Monitorování rádiového signálu ze Země umožňovalo měření asteroidů gravitační pole.[38]
Rovers
Hayabusa2 nesl čtyři malé vozítka prozkoumat povrch asteroidů in situ,[44] a poskytnout kontextové informace pro vrácené vzorky. Vzhledem k minimální gravitaci asteroidu byly všechny čtyři vozítka navrženy tak, aby se pohybovaly krátkým chmelem namísto použití běžných kol. Byli nasazeni v různých termínech od nadmořské výšky asi 60 m (200 ft) a volně padali na povrch pod slabou gravitací asteroidu.[45] První dva vozítka zvané HIBOU (dříve Rover-1A) a OWL (dříve Rover-1B) přistály 21. září 2018 na asteroidu Ryugu.[27] Třetí rover s názvem MASCOT byl nasazen 3. října 2018. Jeho mise byla úspěšná.[46] Čtvrtý rover, známý jako Rover-2 nebo MINERVA-II-2, selhalo před vypuštěním z orbiteru. To bylo vydáno 2. října 2019 na oběžnou dráhu kolem asteroidu a provádět gravitační měření, než bylo o několik dní později dovoleno dopadnout na asteroid.
MINERVA-II

MINERVA-II je nástupcem Přistávací modul MINERVA nesl Hayabusa. Skládá se ze dvou kontejnerů se 3 rovery.
MINERVA-II-1 je kontejner, který nasadil dva vozítka, Rover-1A (HIBOU) a Rover-1B (SOVA), dne 21. září 2018.[47][48] Byl vyvinut společností JAXA a University of Aizu. Rovery jsou identické, mají válcovitý tvar, průměr 18 cm (7,1 palce), výšku 7 cm (2,8 palce) a hmotnost 1,1 kg (2,4 lb).[38][49] Pohybují se poskakováním v nízko gravitačním poli pomocí a točivý moment generované rotujícími hmotami v roverech.[50] Jejich vědecké užitečné zatížení je a stereofonní kamera, širokoúhlý fotoaparát, a teploměry. Solární články a dvouvrstvé kondenzátory poskytnout elektrickou energii.[51][52]
Rovery MINERVA-II-1 byly úspěšně nasazeny 21. září 2018. Oba rovery úspěšně fungovaly na povrchu asteroidů a posílaly obrázky a video z povrchu. Rover-1A operoval 113 dní asteroidů (36 pozemských dnů) a vracel 609 snímků z povrchu a Rover-1B operoval 10 dní asteroidů (3 pozemské dny) a vracel 39 snímků z povrchu.[53]
Kontejner MINERVA-II-2 držel ROVER-2 (někdy označovaná jako MINERVA-II-2), vyvinutá konsorciem univerzit pod vedením Tohoku University v Japonsku. To byla osmiboký hranol tvaru, 15 cm (5,9 palce) průměr a 16 cm (6,3 palce) vysoký, s hmotností asi 1 kg (2,2 lb). Měl dvě kamery, teploměr a akcelerometr. Byl vybaven optickým a ultrafialovým paprskem LED diody osvětlit a detekovat plovoucí částice prachu. ROVER-2 nesl čtyři mechanismy pro pohyb pomocí krátkého chmele.[51]
Rover-2 měl problémy před nasazením z orbiteru, ale byl propuštěn 2. října 2019 na oběžnou dráhu kolem asteroidu a provádět gravitační měření. Poté byl o několik dní později, 8. října 2019, havarován na povrch asteroidů.
MASKOT

The Mobilní asteroidový povrchový průzkumník (MASKOT) byl vyvinut Německé letecké středisko (DLR) ve spolupráci s francouzskou vesmírnou agenturou CNES.[54] Měří 29,5 cm × 27,5 cm × 19,5 cm (11,6 × 10,8 × 7,7 palce) a má hmotnost 9,6 kg (21 lb).[55] MASCOT nese čtyři nástroje: an infračervený spektrometr (MicrOmega), a magnetometr (MASMAG), a radiometr (MARA) a fotoaparát (MASCAM), který zobrazoval strukturu, distribuci a strukturu regolitu v malém měřítku.[56] Rover je schopen se jednou převrátit a přemístit se pro další měření.[44][57] Shromažďoval údaje o povrchové struktuře a mineralogickém složení, tepelném chování a magnetických vlastnostech asteroidu.[58] Má nedobíjecí baterii, která umožňuje provoz po dobu přibližně 16 hodin.[59][60] Infračervený radiometr na Porozumění Mars lander, uvedený na trh v roce 2018, je založen na radiometru MASCOT.[61][62]
MASCOT byl nasazen 3. října 2018. Úspěšně přistál a úspěšně provedl svoji povrchovou misi. Byly publikovány dva příspěvky popisující výsledky z MASCOTu ve vědeckých časopisech Přírodní astronomie a Věda. Jedním zjištěním výzkumu bylo, že Asteroidy typu C. se skládají z poréznějšího materiálu, než se dříve myslelo, což vysvětluje jeho deficit meteorit typ. Meteority tohoto typu jsou příliš pórovité, aby přežily vstup do atmosféra planety Země. Dalším zjištěním bylo to Ryugu Skládá se ze dvou různých téměř černých typů hornin s malou vnitřní soudržnost, ale nebyl detekován žádný prach.[63][64] Třetí článek popisující výsledky z MASCOT byl publikován v Journal of Geophysical Research a popisuje magnetický vlastnosti Ryugu, což ukazuje, že Ryugu nemá magnetické pole na balvanové stupnici.[65]
Objekty nasazené uživatelem Hayabusa2
| Objekt | Vyvinul | Hmotnost | Rozměry | Napájení | Věda užitečné zatížení | Datum přistání nebo nasazení | Postavení |
|---|---|---|---|---|---|---|---|
| Vozítka MINERVA-II-1: Rover-1A (HIBOU) Rover-1B (OWL) | JAXA a University of Aizu | 1,1 kg (2,4 lb) každý | Průměr: 18 cm (7,1 palce) Výška: 7 cm (2,8 palce) | Solární panely | Širokoúhlý fotoaparát, stereofonní kamera, teploměry | 21. září 2018 | Úspěšné přistání. Rover-1A fungoval 36 dní a Rover-1B fungoval 3 dny.[53] |
| Rover-2 (MINERVA-II-2) | Tohoku University | 1,0 kg (2,2 lb) | Průměr: 15 cm (5,9 palce) Výška: 16 cm (6,3 palce) | Solární panely | Dvě kamery, teploměr, akcelerometr. Optické a ultrafialové LED diody pro osvětlení | Vydáno: 2. října 2019, 16:38 UTC | Rover selhal před nasazením, takže byl vypuštěn na oběžnou dráhu kolem asteroidu, aby provedl gravitační měření, než dopadl o několik dní později.[66][67] |
| MASKOT | Německé letecké středisko a CNES | 9,6 kg (21 lb) | 29,5 cm × 27,5 cm × 19,5 cm (11,6 × 10,8 × 7,7 palce) | Nenabíjecí baterie[59] | Fotoaparát, infračervený spektrometr, magnetometr, radiometr | 3. října 2018[68] | Úspěšné přistání. Provoz na baterii více než 17 hodin[60] |
| Nasazitelná kamera 3 (DCAM3) | JAXA | přibližně 2 kg (4,4 lb) | Průměr: 7,8 cm (3,1 palce) Výška: 7,8 cm (3,1 palce) | Nenabíjecí baterie | Objektiv DCAM3-A, objektiv DCAM3-D | 5. dubna 2019 | Nasazeno k pozorování dopadu nárazového tělesa SCI. Nyní neaktivní a předpokládá se, že spadl na asteroid. |
| Malý Carry-On Impactor (SCI) | JAXA | 2,5 kg (5,5 lb) | Průměr: 30 cm (12 palců) Výška: 21,7 cm (8,5 palce) | Nenabíjecí baterie | Žádný | 5. dubna 2019 | Úspěšný. Výstřel na povrch 40 minut po oddělení. |
| Značka cíle B | JAXA | 300 g (11 oz) | 10 cm (3,9 palce) koule | Žádný | Žádný | 25. října 2018 | Úspěšný. Používá se pro první přistání. |
| Značka cíle A | JAXA | 300 g (11 oz) | 10 cm (3,9 palce) koule | Žádný | Žádný | 30. května 2019 | Úspěšný. Používá se pro druhé přistání. |
| Target Marker E (Explorer) | JAXA | 300 g (11 oz) | 10 cm (3,9 palce) koule | Žádný | Žádný | 17. září 2019 | Úspěšný. Vstřikován na rovníkovou oběžnou dráhu a potvrzen přistáním. |
| Značka cíle C (Sputnik / Спутник) | JAXA | 300 g (11 oz) | 10 cm (3,9 palce) koule | Žádný | Žádný | 17. září 2019 | Úspěšný. Vstřikován na polární dráhu a potvrzen přistáním. |
| Marker cíle D | JAXA | 300 g (11 oz) | 10 cm (3,9 palce) koule | Žádný | Žádný | — | Nebylo nasazeno. |
| Ukázková návratová kapsle | JAXA | 16 kg | Průměr: 40 cm Výška: 20 cm | Nenabíjecí baterie | Kontejner na vzorky, Modul pro měření prostředí letu v reálném čase | 5. prosince 2020 UTC | Úspěšné přistání. Byly shromážděny všechny části včetně nádoby na vzorky. |
Vzorkování
| Vzorkování | datum |
|---|---|
| 1. vzorkování povrchu | 21. února 2019 |
| Podpovrchový odběr vzorků | Impaktor SCI: 5. dubna 2019 Cílová značka: 5. června 2019[32] Vzorkování: 11. července 2019[33] |
| 2. vzorkování povrchu | Volitelný;[69] nebylo provedeno. |
Původní plán spočíval v tom, že kosmická loď shromáždila až tři vzorky: 1) povrchový materiál, který vykazuje znaky vodnatých minerálů; 2) povrchový materiál s nepozorovatelnými nebo slabými důkazy vodných změn; 3) vyhloubený podpovrchový materiál.[70]
Začátek prvních dvou povrchových vzorků byl naplánován na konec října 2018, ale rovery ukázaly velké a malé balvany a nedostatečnou povrchovou plochu pro vzorkování, proto se tým mise rozhodl odložit vzorkování na rok 2019 a vyhodnotit různé dostupné možnosti.[29] První vzorkování povrchu bylo dokončeno 22. února 2019 a získalo značné množství ornice,[69][71] takže druhý povrchový odběr vzorků byl odložen a nakonec byl zrušen, aby se snížilo riziko pro misi.[69]
Druhý a poslední vzorek byl odebrán z materiálu, který byl uvolněn zpod povrchu kinetickým impaktorem (SCI impaktor) vystřeleným ze vzdálenosti 300 m (980 ft).[72][73] Všechny vzorky jsou uloženy v samostatných uzavřených nádobách uvnitř vzorová návratová kapsle (SRC).
Vzorek povrchu
Hayabusa2je vzorkovací zařízení je založeno na Hayabusaje. První získávání povrchových vzorků bylo provedeno 21. února 2019, které začalo sestupem kosmické lodi blížícím se k povrchu asteroidu. Když se připojí roh vzorkovače Hayabusa2je spodní strana se dotkla povrchu, 5 g (0,18 oz) tantal projektil (kulka) byl vystřelen rychlostí 300 m / s (980 ft / s) do povrchu.[71] Výsledné vyvržené materiály byly shromážděny „lapačem“ na vrcholu rohu, kterého ejecta dosáhla svou vlastní hybností za podmínek mikrogravitace.[74]
Podpovrchový vzorek

Sběr vzorků pod povrchem vyžadoval, aby impaktor vytvořil kráter, aby získal materiál pod povrch, který nebyl vystaven zvětrávání vesmíru. To vyžadovalo odstranění velkého objemu povrchového materiálu pomocí silného nárazového tělesa. Pro tento účel, Hayabusa2 nasadila dne 5. dubna 2019 volně létající zbraň s jednou „kulkou“ nazvanou Malý nárazový impaktor (SCI); systém obsahoval měděný projektil o hmotnosti 2,5 kilogramu (5,5 lb) vystřelený na povrch výbušnou náplní. Po nasazení SCI Hayabusa2 také po sobě zanechal nasaditelnou kameru (DCAM3)[Poznámka 1] pozorovat a mapovat přesnou polohu dopadu SCI, zatímco orbiter manévroval na odvrácenou stranu asteroidu, aby nebyl zasažen úlomky dopadu.
Přibližně 40 minut po oddělení, když byla kosmická loď v bezpečné vzdálenosti, bylo nárazové těleso vystřeleno do povrchu asteroidu odpálením 4,5 kilogramu (9,9 lb) tvarovaný náboj plastifikované HMX pro zrychlení.[57][75] Měděný impaktor byl vystřelen na povrch z nadmořské výšky asi 500 m (1600 ft) a vyhloubil kráter o průměru asi 10 m (33 ft), který odhalil původní materiál.[14][31] Dalším krokem bylo rozmístění reflexní cílové značky v oblasti poblíž kráteru dne 4. června 2019 na pomoc při navigaci a sestupu.[32] Dotyk a vzorkování proběhly 11. července 2019.[33]
Ukázka vrácení

Kosmická loď shromáždila a uložila vzorky do samostatných uzavřených kontejnerů uvnitř kapsle pro zpětný odběr vzorků (SRC), která je vybavena tepelná izolace. Kontejner má vnější průměr 40 cm (16 palců), výšku 20 cm (7,9 palce) a hmotnost přibližně 16 kg (35 lb).[38]
Na konci vědecké fáze v listopadu 2019[7] Hayabusa2 použila své iontové motory ke změně dráhy a návratu na Zemi.[74] Hodiny předem Hayabusa2 letěl kolem Země koncem roku 2020, kapsli vypustil 5. prosince 2020 v 05:30 UTC.[76] Kapsle byla uvolněna otáčením při jedné otáčce za tři sekundy. Kapsle znovu vstoupila do zemské atmosféry rychlostí 12 km / s (7,5 mi / s) a nasadila radarově reflexní padák ve výšce asi 10 km (6 mi) a vyslala svůj tepelný štít, zatímco vyslala polohu majákový signál.[38][74] Kapsle se vzorkem přistála u Rozsah testu Woomera v Austrálii.[12][77] Celková letová vzdálenost byla 5,24 miliard km (3,26 miliard mi).[38]
Těkavé látky budou shromážděny před otevřením uzavřených nádob.[70] Vzorky budou ošetřeny a analyzovány v JAXA Mimozemské centrum pro kurátorské vzorkování,[78] kde mohou mezinárodní vědci požadovat malou část vzorků. Kosmická loď přinesla zpět kapsli obsahující uhlík bohatý asteroid fragmenty, o nichž se vědci domnívají, že by mohly poskytnout vodítka o starodávném dodávání vody a organických molekul na Zemi.[79][80]
Rozšíření mise
Po úspěšném vrácení a vyzvednutí kapsle se vzorkem dne 6. prosince 2020 (JST ), Hayabusa2 nyní použije zbývajících 30 kg (66 lb) xenon pohonná hmota (z původních 66 kg (146 lb)), která prodlouží její životnost a vyletí na průzkum nových cílů.[81] Jak září 2020, průlet ve výši (98943) 2001 CC21[82] v červenci 2026 a schůzka s 1998 KY26 v červenci 2031 byly vybrány pro prodloužení mise.[83][84][85] Pozorování 2001 CC21 bude během průletu vysokorychlostního letu Asteroid typu L., relativně neobvyklý typ asteroidu.[86] Pevná kamera z Hayabusa2 nebyl navržen pro tento typ průletu. Setkání s 1998 KY26 bude první návštěva rychle rotujícího mikro asteroidu s periodou rotace asi 10 minut.[85] V letech 2021 až 2026 bude kosmická loď provádět také pozorování exoplanety.[87] Možnost provést a Venuše průlet k setkání s 2001 AV43 byl také studován.[88][89]
Vybraný scénář EAEEA (Země → Asteroid → Země → Země → Asteroid):[85]
- Prosinec 2020: Začátek rozšiřující mise
- 2021 do července 2026: provoz plaveb
- Červenec 2026: asteroid typu L 2001 CC21 vysokorychlostní průlet
- Prosinec 2027: Země houpačka
- Červen 2028: Druhý výkyv Země
- Červenec 2031: Cílové tělo (1998 KY26) setkání
Viz také
- Abiogeneze
- Hayabusa Mk2
- OSIRIS-REx - Návratová mise asteroidů NASA do 101955 Bennu (funkční současně s Hayabusa2)
- Panspermie
- 162173 Ryugu
Japonské sondy menších těles
- Hiten
- Průzkum Marťanských měsíců - Plánovaná návratová mise Japonska do Phobosu
- OKEANOS - Navrhovaná vesmírná sonda na trojské asteroidy
- Suisei kosmická loď
Poznámky
Reference
- ^ „JAXA uvádí na trh asteroidovou sondu Hayabusa 2“. nec.com. Tiskové zprávy NEC.
- ^ Hayabusa-2 - Mise pro průzkum asteroidů Vesmírný let 101 Zpřístupněno 30. června 2019
- ^ „Spuštění„ Hayabusa2 “nosnou raketou H-IIA č. 26“. JAXA.
- ^ A b „Společné prohlášení o spolupráci na vzorové návratové misi Hayabusa2 od Australské kosmické agentury a Japonské agentury pro letecký průzkum“ (Tisková zpráva). JAXA. 14. července 2020. Citováno 14. července 2020.
- ^ "Hayabusa2 Earth Swing - podle výsledku". JAXA.
- ^ „Příjezd do Ryugu!“. Projekt JAXA Hayabusa2. 29. června 2018. Citováno 15. července 2018.
- ^ A b C d "Sbohem, Ryugu! Japonská sonda Hayabusa2 opouští asteroid na cestu domů". 13. listopadu 2019.
- ^ A b Wendy Zukerman (18. srpna 2010). „Hayabusa2 bude hledat původ života ve vesmíru“. Nový vědec. Citováno 17. listopadu 2010.
- ^ A b Clark, Stephen (28. června 2018). "Japonská kosmická loď dosáhla asteroidů po tři a půl roku cesty". Vesmírný let teď. Citováno 2. července 2018.
- ^ Rincon, Paul (5. prosince 2020). „Kapsle asteroidů v australské poušti“. BBC novinky. Citováno 6. prosince 2020.
- ^ Chang, Kenneth (5. prosince 2020). „Japonská cesta k asteroidu končí lovem v australském vnitrozemí - mise Hayabusa2 upevnila průkopnickou roli Japonska v průzkumu sluneční soustavy“. The New York Times. Citováno 5. prosince 2020.
- ^ A b Rincon, Paul (6. prosince 2020). „Hayabusa-2: tobolka se vzorky asteroidů v„ dokonalém “tvaru“. BBC novinky. Citováno 6. prosince 2020.
- ^ A b C d Hayabusa2: Vědecký význam vzorků vrácených z asteroidů blízké Země typu C (162173) 1999 JU3. S. Tachibana a kol. Geochemický deník, sv. 48, str. 571–587, 2014
- ^ A b C Yuichi Tsuda; Makoto Yoshikawa; Masanao Abe; Hiroyuki Minamino; Satoru Nakazawa (říjen – listopad 2013). „Návrh systému návratové mise vzorku Hayabusa 2 - asteroidů do roku 1999 JU3“. Acta Astronautica. 91: 356–362. doi:10.1016 / j.actaastro.2013.06.028.
- ^ Hayabusa 2 bude hledat původ života ve vesmíru, Wendy Zukerman, Nový vědec, 18. srpna 2010
- ^ Zpráva JAXA o Hayabusa2, 21. května 2014 Archivováno 4. března 2016 v Wayback Machine
 Tento článek včlení text z tohoto zdroje, který je v veřejná doména.
Tento článek včlení text z tohoto zdroje, který je v veřejná doména. - ^ Vilas, Faith (25. února 2008). „Spektrální charakteristiky cílů asteroidů blízké Země Hayabusa 2 162173 1999 JU3 A 2001 QC34“. Astronomický deník. 135 (4): 1101. Bibcode:2008AJ .... 135.1101V. doi:10.1088/0004-6256/135/4/1101.
cíl plánované japonské mise Hayabusa2
- ^ A b C Makoto Yoshikawa (6. ledna 2011). 小 惑星 探査 ミ ッ シ ョ ン 「は や ぶ さ 2 [Asteroid Exploration Mission "Hayabusa2"] (PDF) (v japonštině). 11. symposium on Space Science. Citováno 20. února 2011.[trvalý mrtvý odkaz ]
- ^ Clark, Stephen (3. prosince 2014). „Hayabusa2 zahajuje odvážné asteroidové dobrodružství“. Vesmírný let teď. Citováno 3. prosince 2014.
- ^ „Japonská další asteroidová sonda schválena pro vývoj“. spaceflightnow.com. Vesmírný let teď.
- ^ Keiji Tachikawa (2007). „Novoroční rozhovor prezidenta“. jaxa.jp. JAXA.
- ^ "Asteroidová sonda, raketa přikývne z japonského panelu". Vesmírný let teď. 11. srpna 2010. Citováno 29. října 2012.
- ^ Zobrazování Ryugu z nadmořské výšky 6 km. Tisková zpráva JAXA. 25. července 2018.
- ^ „hibou“ není japonština ani zkratka; je to francouzské slovo pro sovu a vyslovuje se jako takové, イ ブ ー (i-boo).
- ^ Hayabusa-2: japonské rovery připravené na přistání na asteroidu Paul Rincon, BBC novinky 20. září 2018
- ^ "Japonská sonda kapá drobné poskakující roboty směrem k velkému asteroidu Ryugu". ProfoundSpace.org. 21. září 2018.
- ^ A b Zvládli to! Dva japonské skákací rovery úspěšně přistály na asteroidu Ryugu, Meghan Bartels, ProfoundSpace.org 22. září 2018
- ^ MASCOT bezpečně přistává na asteroidu Ryugu. Tisková zpráva, Portál pro tisk DLR. 3. října 2018.
- ^ A b Naplánujte změny pro operaci přistání JAXA University of Tokyo a spolupracovníci. Projekt Hayabusa2 14. října 2018
- ^ A b Nové fotografie ukazují překvapivě velký kráter odstřelený do asteroidu Ryugu japonskou sondou Hayabusa2. George Dvorský, Gizmodo. 22. května 2019.
- ^ A b C [Japonská kosmická loď Hayabusa2 pořídí epický detailní záběr pouhých 30 stop nad asteroidem], Jackson Ryan, C-síť 5. června 2019
- ^ A b C Hasegawa, Kyoko (11. července 2019). „Japonská sonda Hayabusa2 dělá„ perfektní “přistání na asteroidu“. phys.org.
- ^ Kapsle Hayabusa-2 v australské poušti - BBC News
- ^ Jaká je výhoda vrácení vzorku?
- ^ A b C d E Provozní stav iontových motorů průzkumníka asteroidů Hayabusa2, Nishiyama, Kazutaka; Hosoda, satoshi; Tsukizaki, Ryudo; Kuninaka, Hitoshi; JAXA, Leden 2017
- ^ Systém iontových motorů pro Hayabusa2 „32. mezinárodní konference o elektrickém pohonu, Wiesbaden, Německo, 11. – 15. Září 2011
- ^ A b C d E F G h i j k l m n Ó str q r s t u proti w Informační list Hayabusa2 (PDF). JAXA. 29. července 2018.
- ^ „Japonská další asteroidová sonda schválena pro vývoj“. Vesmírný let teď. 29. ledna 2012. Citováno 29. října 2012.
- ^ Výsledky kalibrace předletové kontroly pro optický navigační kamerový dalekohled (ONC-T) na palubě kosmické lodi Hayabusa2 Kameda, H. Suzuki, T. Takamatsu, Y. Cho, T. Yasuda, M. Yamada, H. Sawada, R. Honda, T. Morota, C. Honda, M. Sato, Y. Okumura, K Shibasaki, S. Ikezawa, S. Sugita; Recenze vesmírných věd Červenec 2017, svazek 208, vydání 1–4, s. 17–31
- ^ „Aktuální stav průzkumníka asteroidů Hayabusa2, který vedl k příletu k asteroidu Ryugu v roce 2018“ (PDF). JAXA. 14. června 2018. Citováno 20. června 2018.
- ^ Terui, Fuyuto; Tsuda, Yuichi; Ogawa, Naoko; Mimasu, Yuya (červenec 2014). 小 惑星 探査 機 「は や ぶ さ 2」 の 航 法 誘導 制 御 に お け る 自動 ・ 自律 機 [Autonomy for Guidance, Navigation and Control of Hayabusa2] (PDF). Umělá inteligence (v japonštině). 29 (4). ISSN 2188-2266. Citováno 9. července 2018.
- ^ Yoshikawa, Makoto (16. ledna 2012). は や ぶ さ 2 プ ロ ジ ェ ク ト に つ い て (PDF). Citováno 9. července 2018.
- ^ A b Podrobný pohled na japonskou misi na průzkum asteroidů Hayabusa2, Phillip Keane, SpaceTech 21. června 2018
- ^ Okada, Tatsuaki; Fukuhara, Tetsuya; Tanaka, satoshi; Taguchi, Makoto; Imamura, Takeshi; Arai, Takehiko; Senshu, Hiroki; Ogawa, Yoshiko; Demura, Hirohide; Kitazato, Kohei; Nakamura, Ryosuke; Kouyama, Toru; Sekiguchi, Tomohiko; Hasegawa, Sunao; Matsunaga, Tsuneo (červenec 2017). „Experimenty s termálním infračerveným zobrazováním asteroidů typu C 162173 Ryugu na Hayabusa2“. Recenze vesmírných věd. 208 (1–4): 255–286. Bibcode:2017SSRv..208..255O. doi:10.1007 / s11214-016-0286-8.
- ^ Lakdawalla, Emily (5. října 2018). "MASCOT přistání na Ryugu úspěšné". Planetární společnost.
- ^ Yoshimitsu, Tetsuo; Kubota, Takashi; Tsuda, Yuichi; Yoshikawa, Makoto. „MINERVA-II1: Úspěšné zachycení obrazu, přistání na Ryugu a hop!“. Projekt JAXA Hayabusa2. JAXA. Citováno 24. září 2018.
- ^ „Pojmenování našich vozů MINERVA-II1“. JAXA. 13. prosince 2018.
- ^ Minoru Ōtsuka (28. března 2016). 車輪 な し で ど う や っ て 移動 す る? ロ ー バ ー 「ミ ネ ル バ 2」 の 仕 組 み (後 編). MONOIST. Citováno 22. června 2018.
- ^ Yoshimitsu, Tetsuo; Kubota, Takashi; Adachi, Tadashi; Kuroda, Yoji (2012). "Pokročilý robotický systém poskakovacích vozítek pro malá tělesa sluneční soustavy". S2CID 16105096. Citovat deník vyžaduje
| deník =(Pomoc) - ^ A b „Hayabusa2“. NASA Space Science Data Coordinated Archive.
- ^ „Průzkumník asteroidů, tisková konference Hayabusa2“ (PDF). JAXA. p. 21.
- ^ A b Yoshimitsu, Tetsuo; Kubota, Takashi; Tomiki, Atsushi; Yoshikaw, Kent (24. října 2019). Výsledky provozu dvojitých vozů MINERVA-II na palubě průzkumníka asteroidů Hayabusa2 (PDF). 70. mezinárodní astronautický kongres. Mezinárodní astronautická federace. Citováno 25. ledna 2020.
- ^ DLR Asteroid Lander MASCOT Archivováno 15. listopadu 2012 v Wayback Machine
- ^ „Hayabusa2 / MASCOT v kostce - technické specifikace a časová osa mise“. DLR. Citováno 22. června 2018.
- ^ Mobilní povrchový asteroidový průzkumník (MASCOT) pro Hayabuse 2 Mision do Ryugu. (PDF) R. Jaumann, J.P.Bibring, K.H. Glassmeier a kol. EPSC Abstrakty. Sv. 11, EPSC2017-548, 2017. European Planetary Science Congress 2017.
- ^ A b Graham, William (2. prosince 2014). „Japonská H-IIA zahajuje misi asteroidů Hayabusa2“. NASASpaceFlight.com. Citováno 4. prosince 2014.
- ^ MASCOT - průzkumník povrchu asteroidů na palubě mise Hayabusa2. Tra-Mi Ho, Volodymyr Baturkin, Christian Grimm, Jan Thimo Grundmann, Catherin Hobbie, Eugen Ksenik, Caroline Lange, Kaname Sasaki, Markus Schlotterer, Maria Talapina, Nawarat Termtanasombat, Elisabet Wejmo, Lars Witte, Michael Wrasmann, Guido Wübbels atd. . Recenze vesmírných věd. Červenec 2017, ročník 208, číslo 1–4, s. 339–374, doi:10.1007 / s11214-016-0251-6
- ^ A b Jsou japonští poskakující roboti na asteroidu Ryugu v bezpečí? Mike Wall, ProfoundSpace.org 21. září 2018
- ^ A b „MASCOT Lander na Twitteru“.
- ^ InSight: Geofyzikální mise do nitra Země, Bruce Banerdt, Jet Propulsion Laboratory, NASA, 7. března 2013 Tento článek včlení text z tohoto zdroje, který je v veřejná doména.
- ^ Grott, M .; Knollenberg, J .; Borgs, B .; Hänschke, F .; Kessler, E .; Helbert, J .; Maturilli, A .; Müller, N. (1. srpna 2016). „Radiometr MASCOT MARA pro misi Hayabusa 2“. Recenze vesmírných věd. 208 (1–4): 413–431. Bibcode:2017SSRv..208..413G. doi:10.1007 / s11214-016-0272-1. S2CID 118245538.
- ^ „MASCOT potvrzuje to, na co vědci dlouho tušili“. dlr.de. Citováno 7. března 2020.
- ^ „Blízkozemský asteroid Ryugu - křehká hromada kosmické suti“. dlr.de. Citováno 7. března 2020.
- ^ Herčík, David; Auster, Hans-Ulrich; Constantinescu, Dragos; Blum, Jürgen; Fornaçon, Karl-Heinz; Fujimoto, Masaki; Gebauer, Kathrin; Grundmann, Jan-Thimo; Güttler, Carsten; Hillenmaier, Olaf; Ho, Tra-Mi (2020). „Magnetické vlastnosti asteroidu (162173) Ryugu“. Journal of Geophysical Research: Planets. 125 (1): e2019JE006035. doi:10.1029 / 2019JE006035. ISSN 2169-9100.
- ^ Downlink: Station Crew Home, Hayabusa2 nasazuje Rover Jason Davis, Planetární společnost 4. října 2019.
- ^ Hatabusa2 na Twitteru JAXA zpřístupněno 7. října 2019
- ^ Podívejte se na první fotografii asteroidu Ryugu z Hopping MASCOT Lander! Tárik Malík, ProfoundSpace.org 3. října 2018
- ^ A b C Aktualizace mise Hayabusa2 Tisková konference JAXA dne 5. března 2019. Citace / překlad:
• Druhé přistání bude provedeno uvnitř nebo v blízkosti umělého kráteru vytvořeného SCI. (Konečné rozhodnutí bude učiněno po operaci SCI, zda skutečně provést druhý pokus.)
• Je vysoká pravděpodobnost, že nebude provedeno třetí přistání.
※ Důvod, proč se rozhodnout dát přednost experimentům s kolizním zařízením
• Bylo posouzeno, že vzorek byl dostatečně odebrán při prvním přistání.
• Existuje případ, kdy se množství světla přijímaného optickým systémem spodního povrchu snížilo v důsledku prvního dotyku. S běžným provozem není problém, ale pro provoz přistání je nutné pečlivé předběžné prošetření. Protože vyšetřování nějakou dobu trvá, byla nejdříve provedena operace SCI. - ^ A b Přiveďte zpět vzorek asteroidů typu C. (v japonštině) Shogo Tachibana JAXA 2013
- ^ A b Hayabusa-2: Japonská kosmická loď přistává na asteroidu. Paul Rincon, BBC novinky, 22. února 2019.
- ^ „Tady je aktualizace exploze kráteru vytvářejícího Hayabusa2“. Planetární společnost. Citováno 24. srpna 2020.
- ^ Harmonogram misí Hayabusa2, JAXA, zpřístupněno 4. října 2018
- ^ A b C Hlavní palubní nástroje - kapsle se zpětným vstupem. Přístup: 2. září 2018.
- ^ Saiki, Takanao; Sawada, Hirotaka; Okamoto, Chisato; Yano, Hajime; Takagi, Yasuhiko; Akahoshi, Yasuhiro; Yoshikawa, Makoto (2013). "Malé příruční nárazové těleso mise Hayabusa2". Acta Astronautica. 84: 227–236. Bibcode:2013AcAau..84..227S. doi:10.1016 / j.actaastro.2012.11.010.
- ^ „は や ぶ さ 2 、 カ プ セ ル 分離 に 成功 6 日 未 明 に 着 地 へ“. Nikkei (v japonštině). 5. prosince 2020. Citováno 5. prosince 2020.
- ^ Jaká je výhoda vrácení vzorku? Jason Davis, Planetární společnost. 5. července 2018.
- ^ Centrum mimozemské péče o vzorky - JAXA.
- ^ Normile, Dennis (7. prosince 2020). „Japonská kapsle Hayabusa2 přistává se vzorky asteroidů bohatých na uhlík“. Věda | AAAS. Citováno 9. prosince 2020.
- ^ „Japonská kosmická loď Hayabusa2 přináší na Zemi kousky asteroidů“. Novinky Asia Today. Citováno 9. prosince 2020.
- ^ Sarli, Bruno Victorino; Tsuda, Yuichi (2017). "Plán rozšíření Hayabusa2: Výběr asteroidů a návrh trajektorie". Acta Astronautica. 138: 225–232. Bibcode:2017AcAau.138..225S. doi:10.1016 / j.actaastro.2017.05.016.
- ^ 98943 (2001 CC21) - Střední asteroid třídy Apollo. Na: spacereference.org. 2019 Judy Mou a Ian Webster
- ^ „は や ぶ さ 2 、 次 の ミ ッ シ ョ ン は 小 惑星「 1998KY26 」… JAXA“. Yomiuri Shimbun (v japonštině). 13. září 2020. Citováno 14. září 2020.
- ^ „Japonská Hayabusa2 si klade za cíl prozkoumat asteroid„ 1998KY26 “v roce 2031“. Mainichi noviny. 15. září 2020. Citováno 15. září 2020.
- ^ A b C „Materiály tiskové konference Hayabusa 2 - 2020 15. září“ (PDF).
- ^ Prosinec 2020, Mike Wall 05. „Japonská vesmírná kapsle nesoucí nedotčené vzorky asteroidů přistává v Austrálii“. ProfoundSpace.org. Citováno 11. prosince 2020.
- ^ „小 惑星 探査 機「 は や ぶ さ 2 」記者 説明 会“ (PDF) (v japonštině). JAXA. 15. září 2020. Citováno 17. září 2020.
- ^ „は や ぶ さ 2 、 再 び 小 惑星 へ 地球 帰 還 後 も 任務 継 続 - 対 象 天体 を 選定 へ ・ JAXA“ [Hayabusa2 prozkoumá další asteroid a bude pokračovat v misi po návratu cílového vzorku na Zemi ・ JAXA]. Jiji Press (v japonštině). 9. ledna 2020. Citováno 9. ledna 2020.
- ^ Bartels, Meghan (12. srpna 2020). „Japonsko může rozšířit misi asteroidů Hayabusa2 k návštěvě 2. vesmírné skály“. ProfoundSpace.org. Citováno 13. srpna 2020.
externí odkazy
- Hayabusa2 webové stránky projektu
- JAXA Hayabusa2 webová stránka
- Hayabusa2 Archivy vědeckých údajů hostitelem archivu DARTS (ISAS)
- Publikace související s MASCOT Institutem planetárního výzkumu hostitelem Europlanet
- Hayabusa2 obrázky vědecký komentář, Tokijská univerzita
- Průzkumník asteroidů Hayabusa2, NEC
- Hayabusa2 3D model, Asahi Shinbun
| Minulost a proud |
|     | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Plánováno | ||||||||||||
| Navrženo |
| |||||||||||
| Zrušeno nebo není vyvinut | ||||||||||||
| Příbuzný | ||||||||||||
| ||||||||||||
| Pozemní |   | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Vesmírné mise |
| ||||||||||
2014 ve vesmíru | ||
|---|---|---|
| ||
| Kosmická sonda startuje |
|    |
| Dopadové události | ||
| Vybraný NEO | ||
| Exoplanety | ||
| Objevy |
| |
| Novae | ||
| Komety | ||
| Průzkum vesmíru |
| |
| ||
2018 ve vesmíru | ||
|---|---|---|
| ||
| Vesmírná sonda startuje |
|   |
| Dopadové události | ||
| Vybraný NEO | ||
| Exoplanety | ||
| Objevy |
| |
| Novae |
| |
| Komety | ||
| Průzkum vesmíru |
| |
| ||
2019 ve vesmíru | ||
|---|---|---|
| ||
| Kosmická sonda startuje |
|    |
| Dopadové události |
| |
| Vybraný NEO | ||
| Exoplanety |
| |
| Objevy |
| |
| Komety | ||
| Průzkum vesmíru |
| |
| ||
2020 ve vesmíru | ||
|---|---|---|
| ||
| Kosmická sonda startuje |
|    |
| Vybraný NEO | ||
| Exoplanety |
| |
| Objevy |
| |
| Komety | ||
| Průzkum vesmíru |
| |
| ||