Skutečná multilaterace - True-range multilateration
tento článek potřebuje další citace pro ověření. (Červen 2017) (Zjistěte, jak a kdy odstranit tuto zprávu šablony) |
Skutečná multilaterace je metoda pro určení polohy pohyblivého vozidla nebo stacionárního bodu v prostoru pomocí více rozsahů (vzdáleností) mezi vozidlem / bodem a více prostorově oddělených známých míst (často označovaných jako „stanice“). Název je odvozen od trilaterace, geometrický problém určení neznámého pozice v letadle na základě vzdálenosti k dalším dvěma známým vrcholy a trojúhelník (délka dvou strany Skutečná multilaterace je matematickým tématem i aplikovanou technikou používanou v několika oblastech. Praktickou aplikací zahrnující pevné místo je trilaterační metoda geodetické. Aplikace zahrnující umístění vozidla se nazývají navigace když jsou palubní osoby / zařízení informovány o jeho poloze a jsou označovány dohled když jsou subjekty mimo vozidlo informovány o poloze vozidla.
Dva šikmé rozsahy ze dvou známých míst lze použít k lokalizaci třetího bodu v dvourozměrném karteziánském prostoru (rovině), což je často používaná technika (např. při geodetickém měření). Podobně dva sférické rozsahy lze použít k vyhledání bodu na kouli, což je základní koncept starodávné disciplíny nebeská navigace - nazval zachycení nadmořské výšky problém. Kromě toho, pokud je k dispozici více než minimální počet rozsahů, je dobré využít i tyto. Tento článek se zabývá obecnou otázkou určování polohy pomocí více rozsahů.
v dvourozměrná geometrie Je známo, že pokud bod leží na dvou kružnicích, pak středy kružnic a dva poloměry poskytují dostatečné informace ke zúžení možných míst na dvě - z nichž jedna je požadovaným řešením a druhá nejednoznačným řešením. Další informace často zužují možnosti na jedinečné místo. Pokud je v trojrozměrné geometrii známo, že bod leží na plochách tří koulí, pak středy těchto tří koulí spolu s jejich poloměry také poskytují dostatečné informace pro zúžení možných míst až na ne více než dvě (pokud středy leží na přímce).
Skutečná multilaterace rozsahu může být porovnána s častěji se vyskytujícími (pseudorange ) multilaterace, který využívá rozdíly v rozsahu k vyhledání (obvykle pohyblivého) bodu. Multilaterace pseudo rozsahů je téměř vždy implementována měřením časů příchodu (TOA) energetických vln. Rovněž lze porovnat multilateraci se skutečným rozsahem triangulace, což zahrnuje měření úhly.
Pro podobné koncepty se používá více, někdy se překrývajících a protichůdných výrazů - např. multilaterace bez úprav byl použit pro letecké systémy využívající jak skutečné rozsahy, tak pseudo rozsahy.[1][2] Kromě toho mohou různé oblasti úsilí používat různé pojmy. v geometrie, trilaterace je definován jako proces určování absolutních nebo relativních poloh bodů měřením vzdáleností pomocí geometrie kruhy, koule nebo trojúhelníky. Při průzkumu trilaterace je specifická technika.[3][4][5] Termín skutečný rozsah mnohostrannosti je přesný, obecný a jednoznačný. Autoři také použili tyto výrazy rozsah-rozsah a rho-rho multilaterace pro tento koncept.
Problémy s implementací
Navigační a sledovací systémy obvykle zahrnují vozidla a vyžadují, aby vládní subjekt nebo jiná organizace nasadila více stanic, které využívají formu rádiové technologie (tj. Využívají elektromagnetické vlny). Výhody a nevýhody využití multilaterace skutečného rozsahu pro takový systém jsou uvedeny v následující tabulce.
| Výhody | Nevýhody |
|---|---|
| Umístění stanic jsou flexibilní; mohou být umístěny centrálně nebo periferně | Uživatel je často povinen mít vysílač i přijímač |
| Přesnost se pomalu zhoršuje se vzdáleností od shluku stanic | Přesnost kooperativního systému je citlivá na chybu otočení zařízení |
| Vyžaduje o jednu stanici méně než multilaterační systém pseudo range | Nelze použít pro tajný dohled |
| Synchronizace stanice není náročná (na základě rychlosti bodu zájmu a může být řešena pomocí mrtvé počítání ) | Nespolupracující dohled zahrnuje ztráty cesty ke čtvrté síle vzdálenosti |
Skutečná multilaterace dosahu je často v kontrastu s multilaterací (pseudo range), protože obě vyžadují formu uživatelských rozsahů pro více stanic. Složitost a náklady na vybavení uživatele jsou pravděpodobně nejdůležitějším faktorem při omezování využití multilaterace skutečného dosahu pro navigaci a sledování vozidel. Některá použití nejsou původním účelem nasazení systému - např. Navigace letadel DME / DME.
Získávání rozsahů
Pro podobné rozsahy a chyby měření poskytuje navigační a monitorovací systém založený na multilateraci skutečného rozsahu službu pro výrazně větší 2-D oblast nebo 3-D objem než systémy založené na pseudo dosahu multilaterace. Měření skutečných rozsahů je však často obtížnější nebo nákladnější než měření pseudo rozsahů. Na vzdálenosti do několika mil a na pevná místa lze skutečný dosah měřit ručně. To bylo provedeno v geodetické po několik tisíc let - např. pomocí lan a řetězů.
Pro delší vzdálenosti a / nebo pro pohybující se vozidla je obvykle zapotřebí rádiový / radarový systém. Tato technologie byla poprvé vyvinuta kolem roku 1940 ve spojení s radarem. Od té doby byly použity tři metody:
- Obousměrné měření rozsahu, jedna strana aktivní - Jedná se o metodu používanou tradičními radary (někdy nazývanou hlavní radary) k určení dosahu nespolupracujícího cíle, který nyní používá laserové dálkoměry. Jeho hlavní omezení spočívají v tom, že: (a) se cíl neidentifikuje a v situaci s více cíli může dojít k nesprávnému přiřazení návratu; b) zpětný signál je zeslaben (vzhledem k vysílanému signálu) o čtvrtý výkon v dosahu stanice vozidla (tedy na vzdálenosti desítek mil nebo více stanice obecně vyžadují vysílače s vysokým výkonem a / nebo velké / citlivé antény); a (c) mnoho systémů využívá šíření přímého vidění, které omezuje jejich dosah na méně než 20 mil, když jsou obě strany v podobných výškách nad hladinou moře.
- Obousměrné měření rozsahu, obě strany aktivní - Tato metoda byla údajně poprvé použita pro navigaci pomocí Y-Gerät naváděcí systém letadel postavený v roce 1941 Luftwaffe. Nyní se globálně používá v řízení letového provozu - např. sekundární radarový dohled a navigace DME / DME. Vyžaduje, aby obě strany měly vysílače i přijímače, a může vyžadovat řešení problémů s rušením.
- Jednosměrné měření rozsahu - čas letu (TOF) elektromagnetické energie mezi více stanicemi a vozidlem se měří na základě přenosu jednou stranou a příjmu druhou stranou. Toto je naposledy vyvinutá metoda a byla umožněna vývojem atomových hodin; vyžaduje, aby vozidlo (uživatel) a stanice se synchronizovanými hodinami. To bylo úspěšně prokázáno s Loran-C a GPS.[6][7] To však není považováno za životaschopné pro široké použití kvůli požadované vybavení uživatele (obvykle atomové hodiny).
Metody řešení
Tato sekce potřebuje expanzi. Můžete pomoci přidávat k tomu. (Červen 2017) |
Skutečný rozsah multilaterace Algoritmy lze rozdělit na základě (a) dimenze problémového prostoru (obecně dva nebo tři), (b) geometrie problémového prostoru (obecně karteziánského nebo sférického) a (c) přítomnosti nadbytečných měření (více než dimenze problémového prostoru).
Dva kartézské rozměry, dva měřené šikmé rozsahy (trilaterace)





Analytické řešení je pravděpodobně známé již více než 1000 let a je uvedeno v několika textech.[8] Navíc lze snadno přizpůsobit algoritmy pro trojrozměrný kartézský prostor.
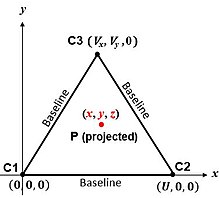
Nejjednodušší algoritmus využívá analytickou geometrii a staniční souřadnicový rámec. Zvažte tedy středy kruhů (nebo stanice) C1 a C2 na obr. 1, které mají známé souřadnice (např. již byly prozkoumány) a tedy jejichž oddělení je známo. Obrázek „stránka“ obsahuje C1 a C2. Pokud je třetí „bod zájmu“ P (např. vozidlo nebo jiný sledovaný bod) je na neznámém místě , pak se získá Pythagorova věta
![{ displaystyle { begin {aligned} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} [4pt] r_ {2} ^ {2} & = (Ux) ^ { 2} + y ^ {2} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75417a7cc7c30bde5d833ed87fd7bac94bdf7ce0)
Tím pádem,
(1)
![{ displaystyle { begin {aligned} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} [4pt] y & = pm { sqrt {r_ {1} ^ {2} -x ^ {2}}} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ebcc6eb379df69ed08e8e83b5c4488c83481b3e3)
I když existuje mnoho vylepšení, rovnice 1 je nejzásadnější skutečný multilaterační vztah. Příkladem jeho použití je letecká DME / DME navigace a trilaterační metoda zaměřování. Během druhé světové války Hoboj a během korejské války SHORAN použil stejný princip k navádění letadel na základě měřených rozsahů do dvou pozemních stanic. SHORAN byl později použit pro průzkum ropy na moři a pro letecký průzkum. Australský letecký průzkumný systém Aerodist využíval 2-D kartézskou skutečnou multilateraci rozsahu.[9] Tento 2D scénář je dostatečně důležitý pro tento termín trilaterace se často používá u všech aplikací zahrnujících známou základní linii a dvě měření rozsahu.
Základní čára obsahující středy kruhů je čára symetrie. Správná a nejednoznačná řešení jsou kolmá k základní linii a jsou jí stejně vzdálená (na opačných stranách). Nejednoznačné řešení je obvykle snadno identifikovatelné. Například pokud P je vozidlo, jakýkoli pohyb směrem k základní linii nebo od ní bude opačný než u nejednoznačného řešení; stačí tedy hrubé měření směru vozidla. Druhý příklad: inspektoři si jsou dobře vědomi, které strany základní linie to jsou P lži. Třetí příklad: v aplikacích, kde P je letadlo a C1 a C2 jsou na zemi, nejednoznačné řešení je obvykle pod zemí.
V případě potřeby vnitřní úhly trojúhelníku C1-C2-P lze najít pomocí trigonometrie zákon kosinů. V případě potřeby také souřadnice P lze vyjádřit v druhém, lépe známém souřadnicovém systému - např Systém Universal Transverse Mercator (UTM) —Zadal souřadnice C1 a C2 jsou v tomto druhém systému známy. Oba se často provádějí při průzkumu, když se používá trilaterační metoda.[10] Jakmile jsou souřadnice P jsou zřízeny, řádky C1-P a C2-P lze použít jako nové základní linie a zkoumat další body. Velké oblasti nebo vzdálenosti lze tedy zkoumat na základě několika menších trojúhelníků - nazývaných a přejít.
Předpokládaný předpoklad, že výše uvedená rovnice bude pravdivá, je ten a se týkají stejné polohy P. Když P je vozidlo, tedy obvykle a musí být měřeno v rámci tolerance synchronizace, která závisí na rychlosti vozidla a dovolené chybě polohy vozidla. Alternativně lze počítat s pohybem vozidla mezi měřením rozsahu, často pomocí mrtvého výpočtu.
Možné je také trigonometrické řešení (případ ze strany na stranu). Možné je také řešení využívající grafiku. Během navigace v reálném čase se někdy používá grafické řešení jako překryv na mapě.
Tři karteziánské rozměry, tři měřené šikmé rozsahy
Existuje několik algoritmů, které řeší problém mnohostrannosti pravého rozsahu 3-D pravého rozsahu přímo (tj. V uzavřené formě) - např. Fang.[11] Kromě toho lze přijmout algoritmy uzavřené formy vyvinuté pro pseudo rozsah multilaterace.[12][8] Bancroftův algoritmus[13] (přizpůsobený) využívá vektory, což je v některých situacích výhodou.
Nejjednodušší algoritmus odpovídá středům koulí na obr. 2. Obrázek „stránka“ je rovina obsahující C1, C2 a C3. Li P je „bod zájmu“ (např. vozidlo) v , pak Pythagorova věta poskytuje sklon mezi nimi P a sférická centra:

![{ displaystyle { begin {aligned} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} + z ^ {2} [4pt] r_ {2} ^ {2} & = (xU) ^ {2} + y ^ {2} + z ^ {2} [4pt] r_ {3} ^ {2} & = (x-V_ {x}) ^ {2} + (y -V_ {y}) ^ {2} + z ^ {2} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c79d1b3b07b4a53e3567564dd212e76f1146473e)
Tak, nechat , souřadnice P jsou:

(2)
![{ displaystyle { begin {aligned} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} [4pt] y & = { frac {r_ {1} ^ {2} -r_ {3} ^ {2} + V ^ {2} -2V_ {x} x} {2V_ {y}}} [4pt] z & = pm { sqrt {r_ {1} ^ {2} -x ^ {2} -y ^ {2}}} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfc991360d8b05be2e1aa68150d8c32a5543a6e8)
Rovina obsahující středy koulí je rovinou symetrie. Správná a nejednoznačná řešení jsou na ni kolmá a na opačných stranách stejně vzdálená.
Mnoho aplikací 3-D multilaterace se skutečným rozsahem zahrnuje krátké vzdálenosti - např. Přesná výroba.[14] Integrace měření dosahu ze tří nebo více radarů (např. FAA ERAM ) je aplikace pro sledování 3D letadel. Pro navigaci letadel byla experimentálně s družicemi GPS použita trojrozměrná multilaterace se skutečným dosahem.[7] Požadavek, aby bylo letadlo vybaveno atomovými hodinami, vylučuje jeho obecné použití. Pomoc s hodinami přijímače GPS je však oblastí aktivního výzkumu, včetně pomoci přes síť. Závěry se tedy mohou změnit.[15] 3-D multilaterace se skutečným dosahem byla hodnocena Mezinárodní organizací pro civilní letectví jako systém přistání letadel, ale bylo zjištěno, že jiná technika je účinnější.[16] Přesné měření výšky letadla během přiblížení a přistání vyžaduje mnoho pozemních stanic podél dráhy letu.
Dva sférické rozměry, dva nebo více měřených sférických rozsahů

Jedná se o klasický nebeský (nebo astronomický) navigační problém, nazývaný zachycení nadmořské výšky problém (obr. 3). Je to ekvivalent sférické geometrie trilaterační metody geodetické (i když použité vzdálenosti jsou obecně mnohem větší). Řešení na moři (nemusí nutně zahrnovat slunce a měsíc) umožnil námořní chronometr (představený v roce 1761) a objev „linie polohy“ (LOP) v roce 1837. Metoda řešení se nyní nejvíce vyučuje na univerzitách ( např. US Naval Academy) zaměstnává sférická trigonometrie řešit šikmý sférický trojúhelník založený na sextant měření „výšky“ dvou nebeských těles.[17][18] Tento problém lze řešit také pomocí vektorové analýzy.[19] Historicky, grafické techniky - např metoda zachycení - byli zaměstnáni. Mohou pojmout více než dvě měřené „nadmořské výšky“. Vzhledem k obtížnosti provádění měření na moři se často doporučují 3 až 5 „nadmořských výšek“.
Protože Země je lépe modelována jako elipsoid revoluce než koule, lze v moderních implementacích použít iterační techniky.[20] V letadlech a raketách s vysokou nadmořskou výškou je nebeský navigační subsystém často integrován do inerciálního navigačního subsystému k provádění automatizované navigace - např. US Air Force SR-71 Blackbird a B-2 Spirit.
I když je Loran-C zamýšlen jako „sférický“ multilaterační systém pseudo-dosahu, byl také používán jako „sférický“ multilaterační systém se skutečným rozsahem dobře vybavenými uživateli (např. Canadian Hydrographic Service).[6] To umožnilo významně rozšířit oblast pokrytí triády stanic Loran-C (např. Zdvojnásobit nebo ztrojnásobit) a snížit minimální počet dostupných vysílačů ze tří na dva. V moderním letectví se častěji měří šikmé rozsahy než sférické rozsahy; pokud je však známa nadmořská výška letadla, jsou šikmé rozsahy snadno převedeny na sférické rozsahy.[8]
Redundantní měření rozsahu
Pokud je k dispozici více měření rozsahu, než je problémová dimenze, ať už ze stejné C1 a C2 (nebo C1, C2 a C3) stanic nebo z dalších stanic, přinejmenším tyto výhody plynou:
- „Špatná“ měření lze identifikovat a odmítnout
- Nejednoznačná řešení lze identifikovat automaticky (tj. Bez lidské účasti) - vyžaduje další stanici
- Chyby v „dobrých“ měřeních lze průměrovat, čímž se snižuje jejich účinek.
Iterativní Gauss – Newtonův algoritmus k řešení nelineární nejmenší čtverce Problémy (NLLS) se obecně upřednostňují, pokud existuje více „dobrých“ měření, než je nutné minimum. Důležitou výhodou metody Gauss – Newton oproti mnoha algoritmům s uzavřeným tvarem je to, že s chybami rozsahu zachází lineárně, což je často jejich povaha, čímž se snižuje účinek chyb rozsahu průměrováním.[12] Metodu Gauss-Newton lze také použít s minimálním počtem měřených rozsahů. Jelikož je iterativní, vyžaduje Gauss – Newtonova metoda počáteční odhad řešení.
V trojrozměrném karteziánském prostoru eliminuje čtvrtá koule nejednoznačné řešení, ke kterému dochází u tří rozsahů, za předpokladu, že její střed není rovinný s prvními třemi. Ve 2D karteziánském nebo sférickém prostoru třetí kruh vylučuje nejednoznačné řešení, ke kterému dochází u dvou rozsahů, za předpokladu, že jeho střed není kolineární s prvními dvěma.
Jednorázová aplikace versus opakovaná aplikace
Tento článek do značné míry popisuje „jednorázové“ použití multilaterační techniky skutečného rozsahu, což je nejzákladnější použití této techniky. S odkazem na obr. 1 je charakteristikou „jednorázových“ situací tento bod P a alespoň jeden z C1 a C2 změna z jedné aplikace multilaterační techniky skutečného rozsahu na další. To je vhodné pro průzkum, nebeskou navigaci pomocí ručních pozorování a navigaci některých letadel DME / DME.
V jiných situacích se však multilaterační technika skutečného rozsahu používá opakovaně (v podstatě nepřetržitě). V těchto situacích C1 a C2 (a možná Cn, n = 3,4, ...) zůstávají konstantní a P je stejné vozidlo. Příkladem aplikací (a vybraných intervalů mezi měřeními) jsou: sledování několika radarovými letadly (5 a 12 sekund, v závislosti na rozsahu pokrytí radarem), letecký průzkum, navigace Loran-C s vysoce přesnými hodinami uživatele (zhruba 0,1 sekundy) a některé navigace DME / DME letadla (zhruba 0,1 sekundy). Obecně platí, že implementace pro opakované použití: (a) používají „sledovací“ algoritmus[21] (kromě algoritmu řešení multilaterace), který umožňuje určitým způsobem porovnat a zprůměrovat měření shromážděná v různých časech; a (b) využívají iterativní algoritmus řešení, protože (b1) připouštějí různé počty měření (včetně nadbytečných měření) a (b2) mají inherentní počáteční odhad při každém vyvolání algoritmu řešení.
Hybridní multilaterační systémy
Jsou také možné hybridní multilaterační systémy - ty, které nejsou ani systémy se skutečným rozsahem, ani systémy pseudosahů. Například na obr. 1, pokud jsou středy kruhů posunuty doleva tak, aby C1 je v a C2 je v pak bod zájmu P je v


![{ displaystyle { begin {aligned} x ^ { prime} & = { frac {(r_ {1} ^ { prime} + r_ {2} ^ { prime}) (r_ {1} ^ { prime} -r_ {2} ^ { prime})} {2U}} [4pt] y ^ { prime} & = pm { frac {{ sqrt {(r_ {1} ^ { prime } + r_ {2} ^ { prime}) ^ {2} -U ^ {2}}} { sqrt {U ^ {2} - (r_ {1} ^ { prime} -r_ {2} ^ { prime}) ^ {2}}}} {2U}} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/656d76a6985f39c396e1a9bda6019b29877112fb)
Tato forma řešení výslovně závisí na součtu a rozdílu a a nevyžaduje "řetězení" z -řešení -řešení. Mohlo by to být implementováno jako multilaterační systém skutečného rozsahu měřením a .




Mohl by však být také implementován jako hybridní multilaterační systém měřením a pomocí různých zařízení - např. pro dohled a multistatický radar s jedním vysílačem a dvěma přijímači (spíše než dvěma monostatickými radary ). I když je eliminace jednoho vysílače výhodou, existuje vyrovnávací „cena“: tolerance synchronizace pro dvě stanice závisí na rychlosti šíření (obvykle rychlosti světla), spíše než na rychlosti bodu P, abychom mohli obě přesně změřit .



Hybridní mnohostranné systémy, které nejsou provozně implementovány, byly zkoumány pro dozor nad letadly poblíž letišť a jako záložní navigační systém GPS pro letectví.[22]
Předběžné a konečné výpočty
Tato sekce potřebuje expanzi. Můžete pomoci přidávat k tomu. (Červen 2018) |
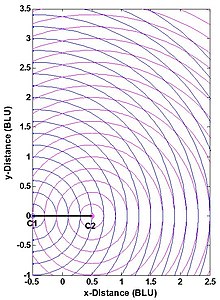
Přesnost polohy multilateračního systému se skutečným dosahem - např. Přesnost souřadnice bodu P na obr. 1 - závisí na dvou faktorech: (1) přesnost měření rozsahu a (2) geometrický vztah P na stanice systému C1 a C2. To lze pochopit z obr. 4. Obě stanice jsou zobrazeny jako tečky a BLU označuje základní jednotky. (Měřicí vzor je symetrický kolem základní linie i kolmé osy základní linie a je na obrázku zkrácen.) Jak se běžně dělá, chyby měření jednotlivých rozsahů jsou považovány za nezávislé na rozsahu, statisticky nezávislé a identicky distribuované. Tento rozumný předpoklad odděluje účinky geometrie uživatelské stanice a chyby měření rozsahu na chybu ve vypočítané souřadnice P. Zde je geometrie měření jednoduše úhel, pod kterým se protínají dva kruhy - nebo ekvivalentně úhel mezi čarami P-C1 a P-C2. Když bod P- není na kruhu, chyba v jeho poloze je přibližně úměrná oblasti ohraničené nejbližšími dvěma modrými a nejbližšími dvěma purpurovými kruhy.
Bez nadbytečných měření nemůže být multilaterační systém se skutečným rozsahem přesnější než měření rozsahu, ale může být výrazně méně přesný, pokud není správně zvolena geometrie měření. Podle toho některé aplikace omezují umístění bodu P. V případě 2-D kartézské (trilaterační) situace mají tato omezení jednu ze dvou ekvivalentních forem:
- Přípustný vnitřní úhel v P mezi řádky P-C1 a P-C2: Ideální je pravý úhel, který se vyskytuje ve vzdálenostech od základní čáry jedné nebo menší délky základní čáry; mohou být stanoveny maximální přípustné odchylky od ideálních 90 stupňů.
- Horizontální ředění přesnosti (HDOP), které znásobuje chybu rozsahu při určování chyby polohy: Pro dva rozměry je ideálním (minimálním) HDOP druhá odmocnina ze 2 (), ke kterému dochází, když je úhel mezi P-C1 a P-C2 je 90 stupňů; může být zadána maximální povolená hodnota HDOP. (Zde jsou stejné HDOP jednoduše lokusem bodů na obr. 4, které mají stejný úhel křížení.)

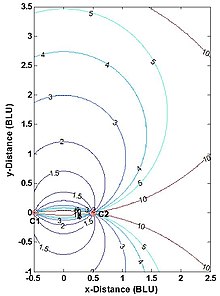
Plánování multilateračního navigačního nebo sledovacího systému se skutečným dosahem často zahrnuje a ředění přesnosti (DOP) analýza za účelem informování rozhodnutí o počtu a umístění stanic a servisní oblasti systému (dva rozměry) nebo objemu služeb (tři rozměry).[23][24] Obr. 5 ukazuje horizontální DOP (HDOP) pro 2-D, dvoupolohový multilaterační systém se skutečným dosahem. HDOP je nekonečný podél základní linie a jejích rozšíření, protože ve skutečnosti je měřena pouze jedna ze dvou dimenzí. Uživatel takového systému by měl být zhruba soustředěný útok na základní linii a v pásmu rozsahu závislého na aplikaci. Například pro opravy navigace DME / DME letadly je maximální HDOP povolený americkým FAA dvojnásobkem minimální možné hodnoty, nebo 2,828,[25] což omezuje maximální rozsah použití (který se vyskytuje podél základní linie) na 1,866násobek délky základní linie. (Letadlo obsahující dvě pozemní stanice DME a letadlo není v přísně vodorovné poloze, ale obvykle je téměř takové.) Podobně geodeti vybírají bod P na obr. 1 tak C1-C2-P zhruba tvoří rovnostranný trojúhelník (kde HDOP = 1,633).
O chybách v trilateračních průzkumech pojednává několik dokumentů.[26][27] Obecně se důraz klade spíše na účinky chyb měření rozsahu, než na účinky numerických chyb algoritmu.
Ukázkové aplikace
- Přistát geodetické pomocí trilaterační metody
- Letecké zaměření
- Námořní archeologie geodetické[28]
- Navigace letadel DME / DME RNAV[25][29]
- Vícenásobná radarová integrace (např. FAA ERAM )[2]
- Nebeská navigace pomocí metody zachycení nadmořské výšky
- Metoda zachycení —Grafické řešení problému zachycení nadmořské výšky
- Kalibrace laserových interferometrů[14]
- SHORAN, Hoboj, Gee-H —Letadlové naváděcí systémy vyvinuté pro „slepé“ bombardování
- JTIDS (Společný systém distribuce taktických informací ) - Systém U.S./NATO, který (mimo jiné) lokalizuje účastníky v síti pomocí rozsahů mezi účastníky
- USAF SR-71 Blackbird letadlo — zaměstnává astro-inerciální navigaci
- USAF B-2 Spirit letadlo — zaměstnává astro-inerciální navigaci
Viz také
- Problém geometrie vzdálenosti, podobná technika aplikovaná na molekuly
- Nebeská navigace —Starodávná technika navigace založená na nebeských tělesech
- Zařízení pro měření vzdálenosti (DME) - Systém používaný k měření vzdálenosti mezi letadlem a pozemní stanicí
- Euklidovská vzdálenost
- Metoda zachycení —Grafická technika používaná v nebeské navigaci
- Laserový dálkoměr
- Multilaterace - Řeší multilateraci pseudo rozsahu
- Dálkoměr —Systémy používané k měření vzdálenosti mezi dvěma body na zemi
- Resekce (orientace)
- SHORAN —Vyvinut jako vojenský navigační systém letadel, později používaný pro civilní účely
- Geodetické
- Tellurometr —První mikrovlnný elektronický dálkoměr
- Triangulace - Geodetická metoda založená na měření úhlů
Reference
- ^ „Multilateration (MLAT) Concept of use“, Mezinárodní organizace pro civilní letectví, 2007
- ^ A b „Radar Basics“, Christian Wolff, nedatováno
- ^ Encyklopedie Britannica
- ^ diracdelta Archivováno 2010-08-12 na Wayback Machine
- ^ slovník zdarma
- ^ A b „Rho-Rho Loran-C v kombinaci se satelitní navigací pro offshore průzkumy“. SVATÝ. Grant, Mezinárodní hydrografický přehled, nedatováno
- ^ A b Dopad rubidiových hodin na GPS navigaci s rozšířeným vozidlem, Zhaonian Zhang; University of Calgary; Prosince 1997.
- ^ A b C Analýza a navigace letadel zaměřená na Zemi, Michael Geyer, US DOT John A. Volpe National Transportation Systems Center, červen 2016.
- ^ Letecké průzkumy Adastra vyvoláno 22. ledna 2019.
- ^ „Povaha geografických informací: trilaterace“, Pennsylvania State Univ., 2018.
- ^ „Trilaterace a rozšíření globální navigace pozičního systému“, B.T. Tesák, Journal of Guidance, Control, and Dynamics, sv. 9 (1986), str. 715–717.
- ^ A b „Algoritmy uzavřené formy v mobilním určování polohy: mýty a mylné představy“, Niilo Sirola, Sborník příspěvků ze 7. workshopu o určování polohy, navigaci a komunikaci 2010 (WPNC'10), 11. března 2010.
- ^ „Algebraické řešení rovnic GPS“ Stephen Bancroft, Transakce IEEE na letectví a elektronických systémech, Volume: AES-21, Issue: 7 (Jan. 1985), pp 56–59.
- ^ A b LaserTracer - nový typ laserového interferometru s vlastním sledováním, Carl-Thomas Schneider, IWAA2004, CERN, Ženeva, říjen 2004
- ^ „Jak mohou atomové hodiny v měřítku čipu pomoci zmírnit širokopásmové rušení“; Fang-Cheng Chan, Mathieu Joerger, Samer Khanafseh, Boris Pervan a Ondrej Jakubov; Svět GPS - inovace; Květen 2014.
- ^ „Mikrovlnný přistávací systém“; Thomas E. Evans; IEEE Aerospace and Electronic Systems Magazine; Sv. 1, číslo 5; Květen 1986.
- ^ Sférická trigonometrie Isaac Todhunter, MacMillan; 5. vydání, 1886.
- ^ Pojednání o sférické trigonometrii a její aplikaci na geodézii a astronomii s mnoha příkladyJohn Casey, Dublin, Hodges, Figgis & Co., 1889.
- ^ „Vektorová geodézie“ Chris Veness. 2016.
- ^ „STELLA (systém pro odhad zeměpisné šířky a délky astronomicky)“, George Kaplan, John Bangert, Nancy Oliversen; Americká námořní observatoř, 1999.
- ^ Sledování a fúze dat: Příručka algoritmů; Y. Bar-Shalom, P.K. Willett, X. Tian; 2011
- ^ „Alternativní poloha, navigace a načasování: potřeba robustní radionavigace“; M. J. Narins, L.V. Eldredge, P. Enge, S.C. Lo, M. J. Harrison a R. Kenagy; Kapitola v Globální navigační satelitní systémySpolečný workshop Národní akademie inženýrství a Čínské akademie inženýrství (2012).
- ^ „Ředění přesnosti“ Richard Langeley, GPS svět, Květen 1999, str. 52–59.
- ^ Omezení přesnosti multilateračních systémů rozsahu-rozsahu (sférických) Harry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, Technická poznámka 1973-43, 11. října 1973.
- ^ A b „DME / DME pro alternativní polohu, navigaci a načasování (APNT)“, Robert W. Lilley a Robert Erikson, Federální letecká správa, Bílá kniha, 23. července 2012.
- ^ Srovnání přesnosti triangulace, trilaterace a triangulace-trilaterace; K.L. Provoro; Novosibirský institut inženýrů geodézie; 1960.
- ^ „Trilaterace v námořní archeologii“, YouTube, Americký národní úřad pro oceán a atmosféru, 2006.
- ^ „DME / DME Accuracy“, Michael Tran, Sborník z Národního technického zasedání 2008 z Navigačního ústavu, San Diego, CA, leden 2008, s. 443–451.
externí odkazy
- stackexchange.com, Implementace PHP / Python