Páteřní pohyb - Spinal locomotion

Páteřní pohyb výsledky složitých dynamických interakcí mezi a centrální program v dolní torakolumbální páteř a proprioceptivní zpětná vazba z těla při absenci centrálního ovládání pomocí mozek jako při úplném poranění míchy (SCI).[1][2][3][4] Po SCI spinální obvody pod místem léze neutichnou, spíše si zachovávají aktivní a funkční neuronální vlastnosti, i když modifikovaným způsobem.[5][6]
Složky páteřní lokomoce

Centrálně generované vzory
Mícha provádí rytmickou a sekvenční aktivaci svalů v pohybu. Centrální generátor vzorů (CPG) poskytuje základní pohybový rytmus a synergie integrací příkazů z různých zdrojů, které slouží k zahájení nebo modulaci jeho výstupu tak, aby splňovala požadavky prostředí. CPG v lumbosakrálních segmentech míchy představují důležitý součástka celkového obvodu, který generuje a řídí držení těla a pohyb.[7] Toto páteřní obvody mohou fungovat nezávisle při absenci sestupného vstupu z mozku, aby generovaly stabilní držení těla a pohyb a dokonce modulovaly aktivitu tak, aby odpovídala měnícím se podmínkám (např. Překračování překážek).[8] Tato schopnost se zlepšuje tréninkem (plasticita páteře)[7] a proto se věří, že mícha má schopnost učit se a memorovat.[9][10]
Senzorická zpětná vazba
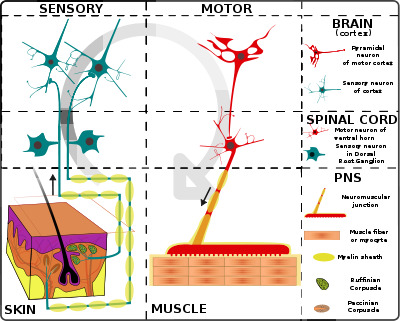
The senzorická zpětná vazba pochází z svaly, klouby, šlachy a kožní aferenty stejně jako z zvláštní smysly a dynamicky přizpůsobuje pohybové vzorce míchy požadavkům prostředí. Tyto aferentní senzorické receptory vnímat deformaci tkáně, množství tlaku (roztažení nebo jednoduše, umístění), směr pohybu, rychlost a rychlost, při které k pohybu dochází.
Senzorická modulace CPG
Dynamické interakce mezi míchou a smyslovým vstupem jsou zajištěny pomocí modulační přenos v pohybových drahách způsobem závislým na stavu a fázi. Například proprioceptivní vstupy od extenzorů mohou během postoje přizpůsobit načasování a amplitudu svalových aktivit končetin rychlosti pohybu, ale během fáze švihu cyklu mohou být umlčeny. Podobně se kožní aferenti podílejí převážně na korekci umístění končetin a chodidel během postoje na nerovném terénu, ale kožní podněty mohou vyvolat různé typy odpovědí v závislosti na tom, kdy k nim dojde v krokový cyklus.[11] Je důležité si uvědomit, že se zdá, že vstupy z kyčle hrají kritickou roli v míšní lokomoci. Pokusy na míšních zvířatech ukázaly, že když je jedna končetina držena s ohnutým kyčlí, lokomoce na této straně se zastaví, zatímco druhá končetina pokračuje v chůzi. Když je však zastavená končetina prodloužena v kyčelním kloubu do bodu, který je během chůze normálně dosažen na konci postoje, najednou se ohne a začne znovu chodit za předpokladu, že kontralaterální končetina je v pozici, která přijímá váhu zadních končetin.[12] Další práce potvrdily význam aferentů kyčle pro generaci lokomotorického rytmu, protože flexe kyčle rytmus zruší, zatímco rozšíření ho zesílí.[13]
Mícha zpracovává a interpretuje propriocepci podobným způsobem jako náš vizuální systém zpracovává informace.[14] Při pohledu na malbu mozek interpretuje součet zorné pole, na rozdíl od samostatného zpracování každého jednotlivého pixelu informací, a poté odvodí obrázek. Mícha v každém okamžiku obdrží soubor informací ze všech receptorů v celém těle, které signalizují proprioceptivní „obraz“, který představuje čas a prostor, a na základě naposledy vnímaných „obrazů“ vypočítává, které neurony budou vzrušovat další. Důležitost CPG není jen jeho schopnost generovat opakující se cykly, ale také přijímat, interpretovat a předpovídat vhodné sekvence akcí během kterékoli části krokového cyklu, tj. Závislost na stavu. Periferní vstup pak poskytuje důležité informace, ze kterých lze jemně vyladit pravděpodobnost, že daná sada neuronů bude aktivní v daném okamžiku, na danou situaci během konkrétní fáze krokového cyklu. Vynikajícím příkladem je, když se na stimul aplikuje mechanický stimul hřbet tlapky kočky. Když je stimul aplikován během fáze švihu, jsou flexorové svaly končetiny vzrušené a výsledek je vylepšen ohnutí aby překročil překážku, která vytvořila podnět.[15] Pokud je však během postoje aplikován stejný stimul, extenzory jsou vzrušené. Tedy funkční propojení mezi mechanoreceptory a konkrétní interneuronální populace v míše se liší podle fyziologického stavu. Dokonce i účinnost monosynaptický vstup z svalová vřetena k motorickému neuronu se snadno mění z jedné části krokového cyklu do druhé, podle toho, zda subjekt běží nebo chodí.[16]
Při absenci CPG, kontroly mozku, jak se to děje při úplném poranění míchy, je při generování rytmické lokomoce velmi důležitá senzorická zpětná vazba. Za prvé, pohybové pohyby mohou být iniciovány nebo blokovány některými proprioceptivními aferentními vstupy.[12] Další práce potvrdily význam aferentů kyčle pro generaci lokomotorického rytmu, protože flexe kyčle rytmus zruší, zatímco extenze ho zesílí.[13] Zadruhé, proprioceptivní aferenti se mohou podílet na přizpůsobování rychlosti chůze, na určování celkové doby trvání cyklu a na regulaci struktury subfází krokového cyklu (tj. Švihu, postoje), která je nutná pro přizpůsobení rychlosti a spojení končetin.[16][17] Zatřetí, proprioceptivní aferenti se podílejí na nastavování úrovně svalové aktivity různými reflexními cestami.[18]
Vývojové důkazy
Ultrazvukové záznamy zajali in utero obrazy člověka plody ve 13–14 gestačních týdnech „plíží a leze“ a produkuje střídavé kroky.[19] Nástup šlapání do plodu předchází vývoji a myelinaci většiny sestupných mozkových cest, což silně naznačuje pohybovou CPG lidské míchy a koordinaci a plasticitu smyslové zpětné vazby. Společně studuje první postnatální rok naznačuje, že pohybové kontinuum sahá od novorozeneckých kroků po nástup nezávislé chůze, což dále naznačuje, že lidská lokomoce je řízena CPG a smyslovou vstupní interakcí.
Rehabilitace
Zraněná mícha je „pozměněná“ mícha. Po SCI se supraspinální a spinální zdroje kontroly pohybu podstatně liší od těch, které existovaly před zraněním,[20] což má za následek změněnou míchu. Automatičnost držení těla a lokomoce vycházejí z interakcí mezi periferním nervovým systémem (PNS) a centrálním nervovým systémem (CNS), které pracují synergicky, přičemž každý systém má vnitřní aktivační a inhibiční vzorce, které mohou generovat koordinované motorické výstupy.
Elektrická stimulace
Četné experimenty prokázaly, že elektrická stimulace (ES) lumbosakrálního zvětšení a hřbetního kořene může u akutních a chronických zvířat s nízkou mírou a u lidí vyvolat lokomoční EMG vzorce a dokonce i krok zadní končetiny.[21][22] Zvýšená stimulační amplituda měla za následek zvýšené amplitudy EMG a zvýšenou frekvenci rytmické aktivity. Vysoké frekvence stimulace (> 70 Hz) způsobily tonickou aktivitu ve svalech dolních končetin, což naznačuje, že horní bederní stimulace může aktivovat neuronální struktury, které poté získávají interneurony zapojené do CPG.[23]
Trénink na běžeckém pásu
Trénink na běžeckém pásu (běžněji známý jako trénink na běžeckém pásu podporovaný tělesnou hmotností) lze aplikovat pomocí manuální (terapeut) nebo robotické pomoci. Při manuálním tréninku na běžeckém pásu poskytují terapeuti pomoc s usnadněním vzpřímeného držení těla a normálního kroku.[24] Pomoc terapeuta může být poskytována na pánvi, noze a chodidle pacienta a třetí terapeut kontrolující nastavení běžeckého pásu.[25] Při tréninku na robotickém běžeckém pásu nahrazuje zařízení potřebu terapeutů, kteří by pacientovi pomáhali při generování normálního kroku. V současné době jsou k dispozici tři různé modely: Hocoma's Lokomat, HealthAouth AutoAmbulator a Mechanized Gait Trainer II.[25] Lokomat je ortéza s hnanou chůzí, která se skládá z počítačově řízeného exoskeletu, který je připevněn k nohám pacienta a je podepřen přes běžecký pás.[24] Kromě běžeckého pásu poháněného řemenem a horního zvedáku obsahuje HealthSouth AutoAmbulator také dvojici kloubových ramen (která pohání kyčelní a kolenní klouby) a dvě svislé konstrukce, ve kterých jsou umístěny ovládací prvky počítače a mechanismus vykládání hmotnosti těla.[25] Na rozdíl od prvních dvou nefunguje Mechanized Gait Trainer II ve spojení s běžeckým pásem; místo toho je založen na klikovém a vahadlovém systému, který poskytuje pohyb končetin podobně jako eliptický trenažér.[25] Robotický trénink na běžeckém pásu byl vyvinut s ohledem na tři cíle: 1. snížit fyzickou náročnost a čas terapeuta, 2. zlepšit opakovatelnost krokové kinematiky a 3. zvýšit objem lokomotorického tréninku.[25]
U lidí s klinicky úplným SCI existují důkazy, že trénink na běžeckém pásu může zlepšit několik aspektů chůze s určitou pomocí podpory hmotnosti. Dietz a jeho kolegové uvádějí, že po několika týdnech tréninku na běžeckém pásu se významně zvyšuje úroveň únosnosti, kterou lze uvést na nohy klinicky dokončených subjektů SCI během chůze na běžeckém pásu.[26] Při šlapání na běžeckém pásu s podporou tělesné hmotnosti lze u klinicky úplných subjektů vyvolat rytmické vzorce aktivace svalů nohou, které jinak nejsou schopné dobrovolně produkovat svalovou aktivitu v nohou.[27] Nedávná studie prokázala, že úrovně svalové aktivity extenzoru nohou zaznamenané u klinicky úplných subjektů SCI se významně zlepšily během několika týdnů krokového tréninku.[28] kroková schopnost klinicky kompletních SCI subjektů se může zlepšit v reakci na krokový trénink, ale úroveň zlepšení nedosáhla úrovně, která by umožňovala úplnou nezávislost na pomoci při plném zatížení. Rovněž u lidí s úplným nebo motoricky úplným SCI bylo prokázáno, že nový přístup využívající léčbu aktivující CPG s názvem Spinalon akutně vyvolává epizody rytmických pohybů nohou podobných lokomotorům nebo odpovídající elektromyografickou aktivitu.[29] Z velké části díky znalostem získaným ze studií na spinalizovaných zvířatech se objevily dva obecné principy, které vzrušují páteřní obvody, které generují stepping:
- Trénink na běžeckém pásu podporovaný tělesnou hmotností zlepšuje schopnost lumbosakrální míchy generovat kroky nesoucí váhu.
- Vzory senzorického vstupu poskytované během lokomotorického tréninku jsou rozhodující pro řízení plasticity, která zprostředkovává pohybové zotavení.
Viz také
- Centrální generátor vzorů
- Centrální nervový systém
- Lokomotiva
- Propriocepce
- Mícha
- Poranění míchy
- Zvláštní smysly
Reference
- ^ Edgerton a kol., 1998a. Lokomotorická kapacita připadající na krokový trénink versus spontánní zotavení po spinalizaci u dospělých koček. Journal of Neurophysiol. 79: 1329–1340.
- ^ Edgerton a kol., 1999a. Zachování schopnosti krokování zadní končetiny u dospělých páteřních koček po ukončení krokového tréninku. Journal of Neurophysiology. 81: 85–94.
- ^ Edgerton et al, 2002. Využití robotiky při hodnocení adaptivní kapacity bederní míchy krysy. Prog. Brain Res. 137: 141–149.
- ^ Guertin PA (prosinec 2009). Msgstr "Centrální generátor vzoru savců pro pohyb". Recenze výzkumu mozku. 62: 345–56. doi:10.1016 / j.brainresrev.2009.08.002. PMID 1972008.CS1 maint: používá parametr autoři (odkaz)
- ^ Edgerton, V.R., Harkema, S.J., Dobkin, B.H. 2003. Rekvalifikace lidské míchy In: Léčba míchy: Principy a praxe. Demos Medical Publishing, kapitola 60, 817-826.
- ^ de Leon, R.D., Roy, R.R. a Edgerton, V.R.2001 Je obnovení kroku po poranění míchy zprostředkováno úpravou stávajících nervových drah nebo generováním nových drah? Fyzikální terapie. 81 (12): 1904-1911.
- ^ A b Dietz 2003. Generátory míchy pro pohyb. Clin. Neurophysiol. 114: 1379–89.
- ^ Forssberg H, Grillner S, Rossignol S. 1975 Fázově závislá reflexní reverze během chůze u chronických spinálních koček. Výzkum mozku. 85: 103–107.
- ^ Garraway SM, Hochman S. 2001. Serotonin zvyšuje výskyt primární aferentní vyvolané dlouhodobé deprese u neuronů hlubokých hřbetních rohů. Journal of Neurophysiology 85: 1864–1872.
- ^ Rygh LJ, Tjolsen A, Hole K, Svendsen F. 2002. Buněčná paměť v spinálních nociceptivních obvodech. Scandinavian Journal of Psychology. 43: 153–159.
- ^ Simonsen EB, Dyhre-Poulsen P. 1999. Amplituda lidského H reflexu soleus během chůze a běhu. Fyziologický časopis. 515: 929–939.
- ^ A b Grillner, S., Rossignol, S., 1978. O zahájení fáze švihu lokomoce u chronických spinálních koček. Výzkum mozku. 146, 269–277.
- ^ A b Pearson, K.G., Rossignol, S., 1991. Fiktivní motorické vzorce u chronických spinálních koček. Journal of Neurophysiology. 66, 1874–1887.
- ^ Reggie Edgerton 2004. Plastickost spinálních nervových obvodů po poranění. Roční přehled neurovědy. 27: 145–167.
- ^ Forssberg H.1979 Klopýtající korekční reakce: fázově závislá kompenzační reakce během lokomoce. Journal of Neurophysiology, 42: 936–953.
- ^ A b Lovely RG, Gregor RJ, Roy RR, Edgerton VR. 1990. Zátěžová zadní končetina šlapat do dospělých spinálních koček cvičených na běžeckém pásu. Výzkum mozku. 514: 206–218
- ^ Zehret al, 2003 Neurální řízení rytmického pohybu lidské paže: fázová závislost a modulace úkolu Hoffmannových reflexů ve svalech předloktí. Journal of Neurophysiology. 89: 12–21.
- ^ Duysens J, Pearson KG. 1980. Inhibice generování prasknutí flexoru načtením extenzorových svalů kotníku u chodících koček. Brain Res.187: 321–332.
- ^ Ianniruberto a Tajani Ultrasonografická studie fetálních pohybů. Semináře z perinatologie 5: 175–181, 1981. [Web of Science] [Medline].
- ^ Dietz a kol., 1998b. Lokomotorický vzorec u paraplegických pacientů: tréninkové účinky a obnovení funkce míchy. Mícha. 36: 380–390.
- ^ Grillner S, Zangger P. 1984. Účinek translace hřbetních kořenů na eferentní motorický vzorec v zadní končetině kočky během lokomoce. Acta Physiologica Skandinávie. 120: 393–405.
- ^ Gerasimenko YP, Avelev VD, Nikitin OA, Lavrov IA. 2003. Zahájení pohybové aktivity u míšních koček epidurální stimulací míchy. Neurovědy a fyziologie chování. 33: 247–254.
- ^ Dimitrijevic MR, Gerasimenko Y, Pinter MM.1998. Důkazy pro spinální centrální generátor vzorů u lidí. Annals of the New York Academy of Science. 860: 360–376.
- ^ A b Hornby, George T., Zemon, David H. a Campbell, Donielle. 2005. Roboticky podporovaná tělesná hmotnost podporovala trénink na běžeckém pásu u jedinců po motoricky neúplném poranění míchy. Fyzikální terapie, 85(1), 52-66.
- ^ A b C d E Winchester, Patricia & Querry, Ross. 2006. Robotické ortézy pro trénink na běžeckém pásu podporované tělesnou hmotností. Kliniky fyzikální medicíny a rehabilitace v Severní Americe, 17(1), 159-172.
- ^ Dietz V, Colombo G, Jensen L, Baumgartner L.1995. Lokomotorická kapacita míchy u paraplegických pacientů. Annals of Neurology. 37: 574–582.
- ^ Maegele M, Muller S, Wernig A, Edgerton VR, Harkema SJ. 2002. Nábor míchových motorických bazénů během dobrovolných pohybů versus šlapání po poranění lidské míchy. Journal of Neurotrauma. 19: 1217–1229.
- ^ Wirz M, Colombo G, Dietz V. 2001. Dlouhodobé účinky pohybového tréninku u páteře. Journal of Neurology Neurosurgery and Psychiatry. 71: 93–96.
- ^ Radhakrishna M, Steuer I, Prince F, Roberts M, Mongeon D, Kia M, Dyck S, Matte G, Vaillancourt M, Guertin PA (prosinec 2017). „Dvojitě zaslepená, placebem kontrolovaná, randomizovaná studie fáze I / IIa (bezpečnost a účinnost) s buspironem / levodopou / karbidopou (Spinalon) u subjektů s úplným poškozením míchy AIS A nebo motoricky úplným AIS B“. Současný farmaceutický design. 23 (12): 1789–1804. doi:10.2174/1381612822666161227152200. PMID 28025945.
externí odkazy
- www.wingsforlife.com
- www.addlestonechiro.com
- www.sci-info-pages.com/levels.html
- Muž, který ztratil své tělo
- [1]
- Výzkum tohoto příspěvku na Wikipedii zahrnoval příspěvky Dr. Jaynie Yang pro online seminář
- Výzkum této stránky zahrnoval recenze od Dr. Edgertona
- Výzkum tohoto příspěvku na Wikipedii byl prováděn jako součást kurzu Locomotion Neuromechanics (APPH 6232) nabízeného na School of Applied Physiology at Georgia Tech