Linearizace - Linearization
v matematika, linearizace hledá lineární aproximace do a funkce v daném bodě. Lineární aproximace funkce je prvního řádu Taylorova expanze kolem bodu zájmu. Ve studii o dynamické systémy, linearizace je metoda pro hodnocení místní stabilita z rovnovážný bod a Systém z nelineární diferenciální rovnice nebo diskrétní dynamické systémy.[1] Tato metoda se používá v oblastech, jako jsou inženýrství, fyzika, ekonomika, a ekologie.
Linearizace funkce
Linearizace a funkce jsou řádky —Obvykle řádky, které lze použít pro účely výpočtu. Linearizace je efektivní metoda pro aproximaci výstupu funkce na kterékoli na základě hodnoty a sklon funkce na , vzhledem k tomu je rozlišitelné na (nebo ) a to je blízko . Stručně řečeno, linearizace se blíží výstupu funkce blízké .




![[a, b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)
![[b, a]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3015146003c7dab01d939e34e07159fa9604bc3)


Například, . Jaká by však byla dobrá aproximace ?


Pro jakoukoli danou funkci , lze přiblížit, je-li v blízkosti známého diferencovatelného bodu. Nejzákladnější podmínkou je to , kde je linearizace na . The bodový sklon rovnice tvoří rovnici přímky dané bodu a sklon . Obecná forma této rovnice je: .





Pomocí bodu , se stává . Protože rozlišitelné funkce jsou lokálně lineární, nejlepším sklonem, který se dá nahradit, bude sklon přímky tečna na na .


Zatímco koncept lokální linearity platí nejvíce pro body svévolně uzavřít na , ti relativně blízcí pracují relativně dobře pro lineární aproximace. Svah by měl být, nejpřesněji, sklon tečny v .
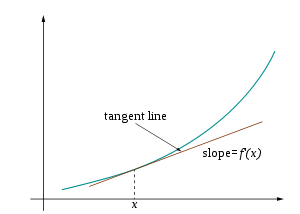
Vizuálně průvodní diagram ukazuje tečnou čáru na . Na , kde je jakákoli malá kladná nebo záporná hodnota, je téměř hodnota tečny v bodě .




Konečná rovnice pro linearizaci funkce v je:

Pro , . The derivát z je a sklon na je .



Příklad
Najít , můžeme použít skutečnost, že . Linearizace na je , protože funkce definuje sklon funkce na . Nahrazení v , linearizace ve 4 je . V tomto případě , tak je přibližně . Skutečná hodnota se blíží 2 00024 999, takže aproximace linearizace má relativní chybu menší než 1 miliontina procenta.








Linearizace funkce s více proměnnými
Rovnice pro linearizaci funkce v určitém okamžiku je:



Obecná rovnice pro linearizaci funkce s více proměnnými v určitém okamžiku je:



kde je vektor proměnných a je linearizační bod zájmu.[2]

Použití linearizace
Linearizace umožňuje používat nástroje ke studiu lineární systémy analyzovat chování nelineární funkce v blízkosti daného bodu. Linearizace funkce je jejím prvkem prvního řádu Taylorova expanze kolem bodu zájmu. Pro systém definovaný rovnicí
- ,

linearizovaný systém lze zapsat jako

kde je bod zájmu a je Jacobian z hodnoceno na .



Analýza stability
v stabilita analýza autonomní systémy, lze použít vlastní čísla z Jacobian matrix hodnoceno na a hyperbolický rovnovážný bod určit povahu této rovnováhy. Toto je obsah teorém o linearizaci. U časově proměnlivých systémů vyžaduje linearizace další zdůvodnění.[3]
Mikroekonomie
v mikroekonomie, rozhodovací pravidla lze aproximovat v rámci přístupu stav-prostor k linearizaci.[4] Podle tohoto přístupu Eulerovy rovnice z problém s maximalizací užitku jsou linearizovány kolem stacionárního ustáleného stavu.[4] Poté je nalezeno jedinečné řešení výsledného systému dynamických rovnic.[4]
Optimalizace
v matematická optimalizace, lze nákladové funkce a nelineární komponenty uvnitř linearizovat, aby bylo možné použít metodu lineárního řešení, jako je Simplexní algoritmus. Optimalizovaného výsledku je dosaženo mnohem efektivněji a je deterministický jako a globální optimum.
Multifyzika
v multifyzika systémy - systémy zahrnující více fyzických polí, která spolu interagují - lze provést linearizaci s ohledem na každé z fyzických polí. Tato linearizace systému s ohledem na každé z polí vede k linearizovanému systému monolitických rovnic, který lze vyřešit pomocí monolitických iteračních postupů řešení, jako je Newton-Raphson metoda. Mezi příklady patří MRI skener systémy, jejichž výsledkem je systém elektromagnetických, mechanických a akustických polí.[5]
Viz také
- Lineární stabilita
- Matice tečné tuhosti
- Stabilitní deriváty
- Věta o linearizaci
- Taylorova aproximace
- Funkční rovnice (funkce L)
Reference
- ^ Problém linearizace v dynamických systémech komplexní dimenze jedna ve Scholarpedii
- ^ Linearizace. Univerzita Johna Hopkinse. Katedra elektrotechniky a výpočetní techniky Archivováno 07.06.2010 na Wayback Machine
- ^ Leonov, G. A .; Kuzněcov, N. V. (2007). "Časově proměnná linearizace a Perronovy efekty". International Journal of Bifurcation and Chaos. 17 (4): 1079–1107. Bibcode:2007 IJBC ... 17.1079L. doi:10.1142 / S0218127407017732.
- ^ A b C Moffatt, Mike. (2008) About.com State-Space přístup Ekonomický glosář; Podmínky začínající na S. Přístup k 19. červnu 2008.
- ^ Bagwell, S .; Ledger, P. D .; Gil, A. J .; Mallett, M .; Kruip, M. (2017). „Linearizovaný hp– Kostra konečných prvků pro acousto-magneto-mechanické propojení v osově symetrických MRI skenerech ". International Journal for Numerical Methods in Engineering. 112 (10): 1323–1352. Bibcode:2017IJNME.112.1323B. doi:10,1002 / nme. 5559.