Buck převodník - Buck converter
tento článek potřebuje další citace pro ověření. (Leden 2009) (Zjistěte, jak a kdy odstranit tuto zprávu šablony) |

A převodník bucků (převaděč) je Měnič stejnosměrného proudu na stejnosměrný který snižuje napětí (při zvyšování proudu) ze svého vstupu (napájení) na výstup (zátěž). Je to třída spínaný napájecí zdroj (SMPS) obvykle obsahující alespoň dva polovodiče (a dioda a a tranzistor, i když moderní měniče měničů často nahrazují diodu druhým tranzistorem používaným pro synchronní oprava ) a alespoň jeden prvek akumulace energie, a kondenzátor, induktor nebo dva v kombinaci. Ke snížení zvlnění napětí se k výstupu převaděče (filtr na straně zátěže) a vstupu (filtr na straně napájení) obvykle přidávají filtry vyrobené z kondenzátorů (někdy v kombinaci s induktory).[1]
Přepínací převaděče (například převaděče buck) poskytují mnohem větší energetická účinnost jako převaděče DC-na-DC než lineární regulátory, což jsou jednodušší obvody, které snižují napětí rozptylováním energie jako tepla, ale nezvyšují výstupní proud.[2]
Převaděče Buck mohou být vysoce účinné (často vyšší než 90%), což je činí užitečnými pro úkoly, jako je převod hlavního (hromadného) napájecího napětí počítače (často 12 V) až na nižší napětí potřebné pro USB, DOUŠEK a procesor (1.8 V nebo méně).
Teorie provozu


Základní operace převaděče buck má proud v induktor ovládané dvěma spínači (obvykle a tranzistor a a dioda ). V idealizovaném převaděči jsou všechny komponenty považovány za dokonalé. Konkrétně spínač a dioda mají nulový pokles napětí, když jsou zapnuty, a nulový tok proudu, když jsou vypnuty, a induktor má nulový sériový odpor. Dále se předpokládá, že se vstupní a výstupní napětí v průběhu cyklu nemění (to by znamenalo, že výstupní kapacita je nekonečný ).
Pojem
Koncepční model převaděče buck je nejlépe pochopen z hlediska vztahu mezi proudem a napětím induktoru. Počínaje otevřeným spínačem (vypnuto) je proud v obvodu nulový. Když je spínač poprvé sepnutý (zapnutý), proud se začne zvyšovat a induktor bude produkovat opačné napětí na svých svorkách v reakci na měnící se proud. Tento pokles napětí působí proti napětí zdroje, a proto snižuje čisté napětí napříč zátěží. V průběhu času se rychlost změny proudu snižuje a napětí na induktoru se také snižuje, což zvyšuje napětí na zátěži. Během této doby induktor ukládá energii ve formě a magnetické pole. Pokud je spínač rozpojen, zatímco se proud stále mění, pak na induktoru vždy dojde k poklesu napětí, takže síťové napětí na zátěži bude vždy menší než zdroj vstupního napětí. Při opětovném otevření spínače (ve vypnutém stavu) bude zdroj napětí z obvodu odstraněn a proud se sníží. Klesající proud způsobí pokles napětí na induktoru (naproti poklesu v zapnutém stavu) a nyní se induktor stane zdrojem proudu. Uložená energie v magnetickém poli induktoru podporuje tok proudu zátěží. Tento proud, který teče, když je zdroj vstupního napětí odpojen, je-li připojen k proudu tekoucímu v zapnutém stavu, je součtem proudu vyššího než průměrný vstupní proud (při vypnutém stavu nulový). „Zvýšení“ průměrného proudu vyrovnává snížení napětí a v ideálním případě zachovává energii dodávanou zátěži. Ve vypnutém stavu induktor vybíjí svoji uloženou energii do zbytku obvodu. Pokud je spínač znovu sepnut dříve, než se induktor zcela vybije (zapnutý), bude napětí na zátěži vždy větší než nula.
Kontinuální režim
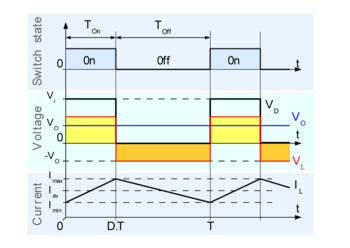
Převodník Buck pracuje v nepřetržitém režimu, pokud proud přes induktor () během komutačního cyklu nikdy neklesne na nulu. V tomto režimu je pracovní princip popsán grafy na obrázku 4:

- Když je spínač na obrázku výše sepnutý (horní část obrázku 2), je napětí na induktoru . Proud induktorem stoupá lineárně (přibližně, pokud je pokles napětí téměř konstantní). Jelikož je dioda napětím předpjatá zdrojem napětí V, neprotéká přes ni žádný proud;
- Po otevření spínače (spodní část obrázku 2) je dioda předpjatá dopředu. Napětí na induktoru je (zanedbání poklesu diody). Proud klesá.


Energie uložená v induktoru L je

Je tedy vidět, že energie uložená v L se během doby zapnutí zvyšuje zvyšuje a poté klesá ve vypnutém stavu. L se používá k přenosu energie ze vstupu na výstup převodníku.
Míra změny lze vypočítat z:

S rovná během zapnutého stavu a do během vypnutého stavu. Zvýšení proudu během zapnutého stavu je tedy dáno:




kde je skalár nazývaný pracovní cyklus s hodnotou mezi 0 a 1.

Naopak pokles proudu během vypnutí je dán vztahem:

Pokud předpokládáme, že převodník pracuje v ustáleném stavu, je energie uložená v každé složce na konci komutačního cyklu T stejná jako na začátku cyklu. To znamená, že aktuální je stejný v a v (obrázek 4).


Z výše uvedených rovnic tedy můžeme psát:

Výše uvedené integrace lze provést graficky. Na obrázku 4 je úměrná ploše žlutého povrchu a do oblasti oranžového povrchu, protože tyto povrchy jsou definovány indukčním napětím (červené čáry). Jelikož tyto povrchy jsou jednoduché obdélníky, lze jejich oblasti snadno najít: pro žlutý obdélník a pro oranžovou. Pro ustálený provoz musí být tyto oblasti stejné.




Jak je vidět na obrázku 4, a .


Tím se získá:

Z této rovnice je patrné, že výstupní napětí převodníku se lineárně mění s pracovním cyklem pro dané vstupní napětí. Jako pracovní cyklus se rovná poměru mezi a období , nemůže být větší než 1. Proto, . Z tohoto důvodu je tento převaděč označován jako převaděč.



Například krokování 12 V na 3 V (výstupní napětí rovnající se jedné čtvrtině vstupního napětí) by vyžadovalo v našem teoreticky ideálním obvodu pracovní cyklus 25%.
Diskontinuální režim

V některých případech je množství energie vyžadované zátěží příliš malé. V tomto případě proud přes induktor během části periody klesne na nulu. Jediný rozdíl ve výše popsaném principu spočívá v tom, že induktor je na konci komutačního cyklu zcela vybitý (viz obrázek 5). To však má určitý účinek na předchozí rovnice.
Proud induktoru klesající pod nulu má za následek vybití výstupního kondenzátoru během každého cyklu, a tím i vyšší spínací ztráty. Různá kontrolní technika známá jako Pulzně-frekvenční modulace lze tyto ztráty minimalizovat.
Stále považujeme převodník za ustálený. Proto je energie v induktoru stejná na začátku a na konci cyklu (v případě diskontinuálního režimu je nulová). To znamená, že průměrná hodnota napětí induktoru (VL) je nula; tj. že plocha žlutého a oranžového obdélníku na obrázku 5 je stejná. Tím se získá:

Takže hodnota δ je:

Výstupní proud dodávaný do zátěže () je konstantní, protože uvažujeme, že výstupní kondenzátor je dostatečně velký, aby udržoval konstantní napětí na jeho svorkách během komutačního cyklu. To znamená, že proud protékající kondenzátorem má nulovou průměrnou hodnotu. Proto máme:


Kde je průměrná hodnota proudu induktoru. Jak je vidět na obrázku 5, průběh proudu induktoru má trojúhelníkový tvar. Proto je průměrná hodnota IL lze geometricky vyřešit takto:


Proud induktoru je na začátku nula a stoupá během tna až na měLmax. To znamená, že jáLmax je rovný:

Nahrazení hodnoty ILmax v předchozí rovnici vede k:

A dosazením δ výrazem uvedeným výše se získá:

Tento výraz lze přepsat jako:

Je vidět, že výstupní napětí měniče buck pracujícího v diskontinuálním režimu je mnohem komplikovanější než jeho protějšek kontinuálního režimu. Kromě toho je výstupní napětí nyní funkcí nejen vstupního napětí (Vi) a pracovní cyklus D, ale také hodnoty induktoru (L), doby komutace (T) a výstupního proudu (IÓ).
Z diskontinuálního do kontinuálního režimu (a naopak)
Jak již bylo zmíněno na začátku této části, převodník pracuje v diskontinuálním režimu, když je zátěží odebírán nízký proud, a v nepřetržitém režimu při vyšších úrovních proudu zátěže. Meze mezi diskontinuálními a spojitými režimy se dosáhne, když proud induktoru klesne na nulu přesně na konci komutačního cyklu. Použitím označení na obrázku 5 to odpovídá:

Proto je výstupní proud (rovný průměrnému proudu induktoru) na hranici mezi diskontinuálním a kontinuálním režimem (viz výše):

Nahrazení ILmax podle jeho hodnoty:

Na hranici mezi těmito dvěma režimy se výstupní napětí řídí jak výrazy danými v kontinuální, tak v diskontinuální sekci. Zejména první je

Takže jáolim lze napsat jako:

Pojďme nyní představit další dvě notace:
- normalizované napětí definované pomocí . Je nula, když a 1 když ;
- normalizovaný proud, definovaný . Termín se rovná maximálnímu zvýšení proudu induktoru během cyklu; tj. zvýšení proudu induktoru s pracovním cyklem D = 1. V ustáleném stavu převodníku to tedy znamená se rovná 0 pro žádný výstupní proud a 1 pro maximální proud, který může převodník dodat.






Pomocí těchto notací máme:
- v nepřetržitém režimu:
- v diskontinuálním režimu:


proud na hranici mezi kontinuálním a diskontinuálním režimem je:

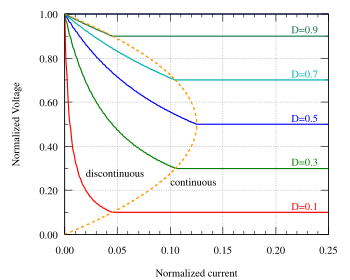
Proto je místo limitu mezi kontinuálním a diskontinuálním režimem dáno:

Tyto výrazy byly zakresleny na obrázku 6. Z toho lze odvodit, že v kontinuálním režimu výstupní napětí závisí pouze na pracovním cyklu, zatímco v diskontinuálním režimu je mnohem složitější. To je důležité z kontrolního hlediska.
Na úrovni obvodu je detekce hranice mezi CCM a DCM obvykle zajišťována snímáním proudu induktoru, což vyžaduje vysokou přesnost a rychlé detektory jako:[3][4]
Neideální obvod
Předchozí studie byla provedena s následujícími předpoklady:
- Výstupní kondenzátor má dostatečnou kapacitu pro napájení zátěže (jednoduchý odpor) bez znatelné změny napětí.
- Pokles napětí na diodě při předpětí je nulový
- Žádné ztráty komutací ve spínači ani v diodě
Tyto předpoklady mohou být poměrně vzdálené realitě a nedokonalosti skutečných komponent mohou mít nepříznivý vliv na provoz převaděče.
Zvlnění výstupního napětí (nepřetržitý režim)
Zvlnění výstupního napětí je název pro jev, při kterém výstupní napětí stoupá během zapnutého stavu a klesá během vypnutého stavu. Přispívá k tomu několik faktorů, mimo jiné spínací frekvence, výstupní kapacita, induktor, zátěž a jakékoli funkce omezující proud řídicích obvodů. Na nejzákladnější úrovni bude výstupní napětí stoupat a klesat v důsledku nabíjení a vybíjení výstupního kondenzátoru:

Můžeme nejlépe aproximovat zvlnění výstupního napětí posunutím výstupního proudu proti časové křivce (kontinuální režim) dolů tak, aby průměrný výstupní proud byl podél časové osy. Když to uděláme, vidíme průběh proudu střídavého proudu proudící do výstupního kondenzátoru a ven z něj (průběh pilovitého zubu). Všimněte si, že Vc-min (kde Vc je napětí kondenzátoru) se vyskytuje při t-on / 2 (těsně po vybití kondenzátoru) a Vc-max při t-off / 2. Integrováním Idt (= dQ; jako I = dQ / dt, C = Q / V, takže dV = dQ / C) pod průběh výstupního proudu prostřednictvím zápisu zvlnění výstupního napětí jako dV = Idt / C integrujeme oblast nad osou do získejte špičkové zvlnění napětí jako: delta V = delta I * T / 8C (kde delta I je špičkový zvlněný proud a T je časové období zvlnění; pokud je to možné, podívejte se na kartu Talk Zde nebudeme graficky zpracovávat oblasti. Zde je uvedeno úplné vysvětlení.) Ze základní teorie obvodů střídavého proudu si všimneme, že naše zvlněné napětí by mělo být zhruba sinusové: impedanční odpor kondenzátoru krát zvlnění proudu mezi špičkami, nebo delta V = delta I / (2 * omega * C), kde omega = 2 * pi * f, f je frekvence zvlnění a f = 1 / T, T doba zvlnění. To dává: delta V = delta I * T / (2 * pi * C) a porovnáváme s touto hodnotou, abychom potvrdili výše uvedené v tom, že máme faktor 8 vs faktor ~ 6,3 ze základní teorie obvodů střídavého proudu pro sinusoida. To dává důvěru v naše hodnocení zvlnění napětí. Odstavec přímo níže se vztahuje přímo nad a může být nesprávný. Použijte rovnice v tomto odstavci. Další informace najdete na záložce diskuse: týkající se výstupního zvlnění napětí a AoE (Art of Electronics 3. vydání).
Během vypnutého stavu je proud v této rovnici zatěžovacím proudem. V zapnutém stavu je proud rozdílem mezi spínacím proudem (nebo zdrojovým proudem) a proudem zátěže. Doba trvání (dT) je definována pracovním cyklem a spínací frekvencí.
Pro zapnutý stav:

Pro stav Off:

Kvalitativně, jak se zvyšuje výstupní kondenzátor nebo spínací frekvence, velikost zvlnění klesá. Zvlnění výstupního napětí je obvykle konstrukční specifikací napájecího zdroje a je vybráno na základě několika faktorů. Výběr kondenzátoru se obvykle určuje na základě ceny, fyzické velikosti a neideálnosti různých typů kondenzátorů. Výběr spínací frekvence je obvykle určen na základě požadavků na účinnost, které mají tendenci klesat při vyšších provozních frekvencích, jak je popsáno níže v Účinky neideálnosti na účinnost. Vyšší spínací frekvence může také vyvolat obavy ohledně EMI.
Zvlnění výstupního napětí je jednou z nevýhod spínacího napájecího zdroje a může být také měřítkem jeho kvality.
Účinky neideálnosti na účinnost
Zjednodušená analýza převaděče buck, jak je popsána výše, nezohledňuje neideálie prvků obvodu ani nezohledňuje požadované řídicí obvody. Ztráty výkonu způsobené řídicími obvody jsou obvykle zanedbatelné ve srovnání se ztrátami v napájecích zařízeních (spínače, diody, induktory atd.). Nebytnosti výkonových zařízení představují velkou část ztrát výkonu v převodníku.
V jakémkoli spínacím regulátoru dochází ke ztrátám statického i dynamického výkonu. Mezi statické ztráty energie patří (vedení) ztráty v drátech nebo stopách PCB, stejně jako ve spínačích a induktoru, jako v jakémkoli elektrickém obvodu. Dynamické ztráty výkonu se vyskytují v důsledku spínání, jako je nabíjení a vybíjení spínací brány, a jsou úměrné spínací frekvenci.

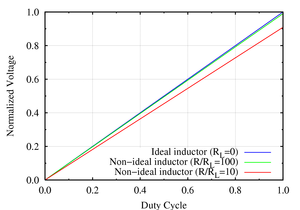
Je užitečné začít výpočtem pracovního cyklu pro neideální převodník buck, který je:

kde:
- PROTIsw je pokles napětí na vypínači,
- PROTIsw, synchronizace je pokles napětí na synchronním spínači nebo diodě a
- PROTIL je pokles napětí na induktoru.
Výše popsané poklesy napětí jsou všechny ztráty statického výkonu, které jsou primárně závislé na stejnosměrném proudu, a lze je tedy snadno vypočítat. Pro pokles diody PROTIsw a PROTIsw, synchronizace již mohou být známy na základě vlastností vybraného zařízení.

kde:
- Rna je odpor ON každého spínače a
- RDC je stejnosměrný odpor induktoru.
Rovnice pracovního cyklu je poněkud rekurzivní. Hrubou analýzu lze provést nejprve výpočtem hodnot PROTIsw a PROTIsw, synchronizace pomocí ideální rovnice pracovního cyklu.
Pro pokles napětí MOSFET je běžnou aproximací použití RDSon z datového listu MOSFET v Ohmově zákoně, V = IDSRDSon (sat). Tato aproximace je přijatelná, protože MOSFET je v lineárním stavu s relativně konstantním odporem odtokového zdroje. Tato aproximace je platná pouze při relativně nízkém VDS hodnoty. Pro přesnější výpočty obsahují datové listy MOSFET grafy na V.DS a jáDS vztah na více VGS hodnoty. Dodržujte V.DS na VGS a jáDS které nejvíce odpovídají tomu, co se očekává v převaděči buck.[5]
Navíc dochází ke ztrátě energie v důsledku svodových proudů. Tato ztráta energie je prostě

kde:
- Jáúnik je svodový proud spínače a
- PROTI je napětí na spínači.
Dynamické ztráty výkonu jsou způsobeny spínacím chováním vybraných zařízení pass (MOSFETy, výkonové tranzistory, IGBT, atd.). Mezi tyto ztráty patří ztráty při zapnutí a vypnutí a ztráty při přepnutí.
Ztráty zapnutí a vypnutí jsou snadno spojeny dohromady

kde:
- PROTI je napětí na spínači, když je spínač vypnutý,
- tstoupat a tpodzim jsou doby náběhu a doběhu spínače a
- T je spínací doba
ale to nebere v úvahu parazitní kapacitu MOSFET, která dělá Millerova deska. Ztráty při přepnutí pak budou spíše podobné:

Pokud je pro spodní spínač použit MOSFET, mohou se v době mezi vypnutím spínače vysoké strany a zapnutím spínače nízké strany, kdy je dioda těla nízkofrekvenční diody MOSFET, vyskytnout další ztráty. vede výstupní proud. Tentokrát, známý jako čas nepřekrývající se, zabraňuje „průletu“, což je stav, kdy jsou oba spínače současně zapnuty. Nástup průniku generuje vážné ztráty energie a teplo. Správný výběr nepřekrývajícího se času musí vyvážit riziko průniku se zvýšenou ztrátou energie způsobenou vedením tělesné diody. Mnoho převaděčů založených na MOSFET také obsahuje diodu, která pomáhá diodě spodního těla MOSFET s vedením během nepřekrývajícího se času. Pokud se dioda používá výhradně pro spodní spínač, může doba zapnutí diody dopředu snížit účinnost a vést k překročení napětí.[6]
Ztráta energie na diodě těla je také úměrná spínací frekvenci a je

kde:
- PROTIF je dopředné napětí diody těla, a
- tNe je vybraný nepřekrývající se čas.
Nakonec dochází ke ztrátám energie v důsledku energie potřebné k zapnutí a vypnutí spínačů. U přepínačů MOSFET těmto ztrátám dominuje energie potřebná k nabití a vybití kapacity brány MOSFET mezi hraniční napětí a zvolené hradlové napětí. Tyto ztráty přechodu spínače se vyskytují primárně v ovladači brány a lze je minimalizovat výběrem MOSFETů s nízkým nábojem brány, pohonem brány MOSFET na nižší napětí (za cenu zvýšených ztrát vedením MOSFET) nebo provozem na nižší frekvenci .

kde:
- QG je hradlový poplatek vybraného MOSFETu a
- PROTIGS je špičkové napětí hradlového zdroje.
U N-MOSFETů musí být přepínač na vysoké straně napájen vyšším napětím než PROTIi. Aby toho bylo dosaženo, ovladače brány MOSFET obvykle dodávají výstupní napětí MOSFET zpět do ovladače brány. Ovladač brány poté přidává své vlastní napájecí napětí do výstupního napětí MOSFET při řízení vysokých MOSFETů k dosažení PROTIGS stejné jako napájecí napětí ovladače brány.[7] Protože nízká strana PROTIGS je napájecí napětí ovladače brány, výsledkem je velmi podobné PROTIGS hodnoty pro high-side a low-side MOSFETy.
Kompletní design převaděče buck zahrnuje a analýza kompromisu různých energetických ztrát. Návrháři vyvažují tyto ztráty podle očekávaného využití hotového návrhu. Převodník, u kterého se očekává nízká spínací frekvence, nevyžaduje spínače s nízkými ztrátami přechodu brány; převodník pracující při vysokém pracovním cyklu vyžaduje spínač na nízké straně s nízkými ztrátami vedením.
Specifické struktury
Synchronní oprava

Synchronní měnič měniče je upravená verze základní topologie obvodu měniče měniče, ve které je dioda D nahrazena druhým spínačem, S2. Tato modifikace představuje kompromis mezi zvýšenými náklady a zvýšenou účinností.
Ve standardním převaděči buck je flyback dioda zapne se sám krátce po vypnutí spínače v důsledku stoupajícího napětí na diodě. Tento pokles napětí na diodě má za následek ztrátu výkonu, která se rovná

kde:
- PROTID je pokles napětí na diodě při zatěžovacím proudu JáÓ,
- D je pracovní cyklus a
- JáÓ je zatěžovací proud.
Výměnou diody za spínač zvolený pro nízké ztráty lze zlepšit účinnost převodníku. Například MOSFET s velmi nízkým RDSon může být vybrán pro S2, poskytující ztrátu energie na přepínači 2 který je

V obou případech je ztráta výkonu silně závislá na pracovním cyklu, D. Ztráta výkonu na volnoběžné diodě nebo dolním spínači bude úměrná době jeho zapnutí. Proto systémy navržené pro provoz s nízkým pracovním cyklem budou trpět vyššími ztrátami ve volnoběžné diodě nebo spodním spínači a pro takové systémy je výhodné uvažovat o návrhu synchronního měniče.
Zvažte a napájení počítače, kde je vstup 5 V, výstup je 3,3 V a zátěžový proud je 10 Odpověď: V tomto případě bude pracovní cyklus 66% a dioda bude svítit 34% času. Typická dioda s dopředným napětím 0,7 V by utrpěla ztrátu výkonu 2,38 W. Dobře zvolený MOSFET s RDSon 0,015 Ω by však při ztrátě vedení ztrácel pouze 0,51 W. To se projevuje zlepšenou účinností a sníženou tvorbou tepla.
Další výhodou synchronního převodníku je, že je obousměrný, což je vhodné pro aplikace vyžadující rekuperační brzdění. Když je síla přenášena v „obráceném“ směru, funguje podobně jako a boost převodník.
Výhody synchronního převaděče buck nepřijdou bez nákladů. Za prvé, spodní spínač obvykle stojí více než dioda s volnoběžkou. Za druhé, složitost převaděče se výrazně zvýšila kvůli potřebě ovladače doplňkového výstupu ovladače.
Takový řidič musí zabránit zapnutí obou spínačů současně, což je porucha známá jako „průnik“. Nejjednodušší technikou, jak se vyhnout přestřelce, je časové zpoždění mezi vypnutím S1 k zapnutí S2a naopak. Nastavení tohoto časového zpoždění však dostatečně dlouho, aby bylo zajištěno, že S1 a S.2 nejsou nikdy zapnuty, bude mít sám o sobě za následek nadměrnou ztrátu energie. Vylepšená technika prevence tohoto stavu je známá jako adaptivní „nepřekrývající se“ ochrana, při které napětí v uzlu spínače (bod, kde S1, S.2 a L jsou spojeny) je snímán k určení jeho stavu. Když napětí spínacího uzlu překročí přednastavenou prahovou hodnotu, spustí se časové zpoždění. Řidič se tak může přizpůsobit mnoha typům přepínačů bez nadměrné ztráty energie, kterou by tato flexibilita způsobila s pevným časem nepřekrývání.
Vícefázový dolar


Vícefázový převaděč buck je topologie obvodu, kde jsou základní obvody převodníku buck umístěny paralelně mezi vstupem a zátěží. Každý z n "fáze" se zapínají ve stejných intervalech po celou dobu spínání. Tento obvod se obvykle používá s synchronní dolar topologie, popsaná výše.
Tento typ převaděče může reagovat na změny zátěže tak rychle, jako by se přepnul n krát rychleji, aniž by došlo ke zvýšení ztrát při přepínání, které by to způsobilo. Může tedy reagovat na rychle se měnící zátěže, jako jsou moderní mikroprocesory.
Došlo také k výraznému poklesu zvlnění přepínání. Nejen, že došlo k poklesu v důsledku zvýšené efektivní frekvence,[8] ale kdykoli n kolikrát je pracovní cyklus celé číslo, spínací vlnění jde na 0; rychlost, při které se indukční proud zvyšuje ve fázích, které jsou zapnuty, přesně odpovídá rychlosti, s jakou klesá ve fázích, které jsou vypnuty.
Další výhodou je, že zátěžový proud je rozdělen mezi n fáze vícefázového převodníku. Toto rozdělení zátěže umožňuje, aby se tepelné ztráty na každém ze spínačů rozložily na větší plochu.
Tato topologie obvodu se používá v základních deskách počítačů k převodu napětí 12 V.DC zdroj napájení na nižší napětí (kolem 1 V), vhodné pro procesor. Moderní požadavky na výkon procesoru mohou přesáhnout 200 W,[9] se mohou velmi rychle měnit a mají velmi přísné požadavky na zvlnění, méně než 10 mV. Typické zdroje základní desky používají 3 nebo 4 fáze.
Jednou z hlavních výzev vícefázového převodníku je zajištění rovnoměrného vyvážení zátěžového proudu napříč n fáze. Toto aktuální vyvážení lze provést mnoha způsoby. Proud lze měřit „bezeztrátově“ snímáním napětí na induktoru nebo spodním spínači (je-li zapnutý). Tato technika je považována za bezeztrátovou, protože se spoléhá na odporové ztráty vlastní topologii převaděče buck. Další technikou je vložit malý odpor do obvodu a měřit napětí na něm. Tento přístup je přesnější a nastavitelnější, ale přináší několik nákladů - prostor, účinnost a peníze.
Nakonec lze na vstupu měřit proud. Napětí lze měřit bezeztrátově, přes horní spínač nebo pomocí výkonového rezistoru, aby se přiblížil odebíraný proud. Tento přístup je technicky náročnější, protože spínací šum nelze snadno odfiltrovat. Je to však levnější než mít snímací rezistor pro každou fázi.
Faktory účinnosti
Ztráty vedením závislé na zátěži:
- Odpor, když je tranzistor nebo spínač MOSFET vodivý.
- Pokles napětí dopředné diody (obvykle 0,7 V nebo 0,4 V pro Schottkyho dioda )
- Odpor vinutí induktoru
- Kondenzátorový ekvivalentní sériový odpor
Spínací ztráty:
- Ztráta překrytí napětí-ampér
- Frekvencepřepínač*ŽIVOTOPIS2 ztráta
- Reverzní ztráta latence
- Ztráty v důsledku řízení MOSFET brány a spotřeby řadiče.
- Ztráty svodového proudu tranzistoru a spotřeba v pohotovostním režimu regulátoru.[10]
Impedanční shoda
Převaděč buck lze použít k maximalizovat přenos síly prostřednictvím použití impedanční přizpůsobení. Aplikace tohoto je v a sledovač maximálního výkonu běžně používané v fotovoltaické systémy.
Podle rovnice pro elektrická energie:

kde:
- PROTIÓ je výstupní napětí
- JáÓ je výstupní proud
- η je energetická účinnost (v rozsahu od 0 do 1)
- PROTIi je vstupní napětí
- Jái je vstupní proud
Podle Ohmův zákon:

kde:
- ZÓ is the output impedance
- Zi is the input impedance
Substituting these expressions for IÓ a jái into the power equation yields:

As was previously shown for the nepřetržitý režim, (where IL > 0):
kde:
- D is the duty cycle
Substituting this equation for PROTIÓ into the previous equation, yields:

což snižuje na:

a nakonec:

This shows that it is possible to adjust the impedance ratio by adjusting the duty cycle. This is particularly useful in applications where the impedances are dynamically changing.
aplikace

The buck is widely used in low power consumption small electronics to step-down from 24/12V down to 5V. They are sold as a small finish product chip for well less than US$1 having about 95% efficiency.
Viz také
- Boost převodník
- Převodník buck-boost
- Ćuk převodník
- Topologie split-pi
- Všeobecné DC-DC converters a Switched-mode power supplies
Reference
- ^ Mammano, Robert. "Switching power supply topology voltage mode vs. current mode." Elektron Journal-South African Institute of Electrical Engineers 18.6 (2001): 25-27.
- ^ „Archivovaná kopie“. Archivovány od originál dne 23. září 2016. Citováno 11. července 2016.CS1 maint: archivovaná kopie jako titul (odkaz)
- ^ "Inductor Current Zero-Crossing Detector and CCM/DCM Boundary Detector for Integrated High-Current Switched-Mode DC-DC Converters".
- ^ "Time Domain CCM/DCM Boundary Detector with Zero Static Power Consumption".
- ^ "Power MOSFET datasheet list". www.magnachip.com. MagnaChip. Citováno 25. ledna 2015.
- ^ Jim Williams (1 January 2009). "Diode Turn-On Time Induced Failures in Switching Regulators".
- ^ "NCP5911 datasheet" (PDF). www.onsemi.com. ON Semiconductor. Citováno 25. ledna 2015.
- ^ Guy Séguier, Électronique de puissance, 7th edition, Dunod, Paris 1999 (in French)
- ^ "Idle/Peak Power Consumption Analysis - Overclocking Core i7: Power Versus Performance". tomshardware.com. 13 April 2009.
- ^ "iitb.ac.in - Buck converter" (PDF). Archivovány od originál (PDF) dne 16. července 2011. 090424 ee.iitb.ac.in
- P. Julián, A. Oliva, P. Mandolesi, and H. Chiacchiarini, "Output discrete feedback control of a DC-DC Buck converter," in Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE’97), Guimaraes, Portugal, 7-11 July 1997, pp. 925–930.
- H. Chiacchiarini, P. Mandolesi, A. Oliva, and P. Julián, "Nonlinear analog controller for a buck converter: Theory and experimental results", Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE’99), Bled, Slovenia, 12–16 July 1999, pp. 601–606.
- M. B. D’Amico, A. Oliva, E. E. Paolini y N. Guerin, "Bifurcation control of a buck converter in discontinuous conduction mode", Proceedings of the 1st IFAC Conference on Analysis and Control of Chaotic Systems (CHAOS’06), pp. 399–404, Reims (Francia), 28 al 30 de junio de 2006.
- Oliva, A.R., H. Chiacchiarini y G. Bortolotto "Developing of a state feedback controller for the synchronous buck converter", Latin American Applied Research, Volume 35, No 2, Abril 2005, pp. 83–88. ISSN 0327-0793.
- D’Amico, M. B., Guerin, N., Oliva, A.R., Paolini, E.E. Dinámica de un convertidor buck con controlador PI digital. Revista Iberoamericana de automática e informática industrial (RIAI), Vol 4, No 3, July 2007, pp. 126–131. ISSN 1697-7912.
- Chierchie, F. Paolini, E.E. Discrete-time modeling and control of a synchronous buck converter .Argentine School of Micro-Nanoelectronics, Technology and Applications, 2009. EAMTA 2009. 1–2 October 2009, pp. 5 – 10 . ISBN 978-1-4244-4835-7 .
externí odkazy
- https://www.ipes.ethz.ch/mod/lesson/view.php?id=2 Interactive Power Electronics Seminar (iPES)] Many Java applets demonstrating the operation of converters
- Model based control of digital buck converter Description and working VisSim source code diagram for low cost digital control of DC-DC buck converters
- SPICE simulation of the buck converter
- Switch-Mode Power Supply Tutorial - Detailed article on DC-DC converters which gives a more formal and detailed analysis of the Buck including the effects of non-ideal switching (ale, note that the diagram of the buck-boost converter fails to account for the inversion of the polarity of the voltage between input and output).
- DC-DC Power Converter Case study
- On the Power Efficiency Optimization
- Multiphase DC-DC converter