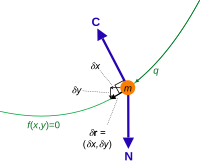
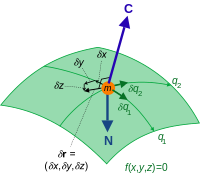
Omezovací síla C a virtuální posunutí δr pro částici hmoty m omezen na křivku. Výsledná neomezující síla je N. Složky virtuálního posunutí souvisí s vazební rovnicí.
v analytická mechanika, pobočka aplikovaná matematika a fyzika, a virtuální posunutí (nebo nekonečně malá variace)  ukazuje, jak může dráha mechanického systému dosáhnout hypoteticky (odtud termín virtuální) se velmi mírně odchylují od skutečné trajektorie
ukazuje, jak může dráha mechanického systému dosáhnout hypoteticky (odtud termín virtuální) se velmi mírně odchylují od skutečné trajektorie  systému bez porušení omezení systému.[1][2][3]:263 Pro každý okamžik
systému bez porušení omezení systému.[1][2][3]:263 Pro každý okamžik 
 je vektor tangenciální do konfigurační prostor na místě
je vektor tangenciální do konfigurační prostor na místě  Vektory ukázat směr, kterým
Vektory ukázat směr, kterým  může „jít“ bez porušení omezení.
může „jít“ bez porušení omezení.
Například virtuální posuny systému skládající se z jedné částice na dvojrozměrném povrchu vyplňují celou tečnou rovinu za předpokladu, že neexistují žádná další omezení.
Pokud však omezení vyžadují všechny trajektorie projít daným bodem  v danou dobu
v danou dobu  tj.
tj.  pak
pak 
Zápisy
Nechat  být konfigurační prostor mechanického systému,
být konfigurační prostor mechanického systému,  být časovými okamžiky,
být časovými okamžiky,  a
a
![{ displaystyle P (M) = { gamma v C ^ { infty} ([t_ {0}, t_ {1}], M) mid gamma (t_ {0}) = q_ {0} , gamma (t_ {1}) = q_ {1} }.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2dc1492c3cc5ebe8f103379d3fdf8fc00e0ea805)
Omezení 
 jsou zde pouze pro ilustraci. V praxi je pro každý jednotlivý systém vyžadována individuální sada omezení.
jsou zde pouze pro ilustraci. V praxi je pro každý jednotlivý systém vyžadována individuální sada omezení.
Definice
Pro každou cestu  a
a  A variace z je funkce
A variace z je funkce ![{ displaystyle Gamma: [t_ {0}, t_ {1}] krát [- epsilon _ {0}, epsilon _ {0}] do M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd9c230b9d5d1aed3ddd9872afa3e50ec86870ac) takové, že pro každého
takové, že pro každého ![{ displaystyle epsilon in [- epsilon _ {0}, epsilon _ {0}],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b12ca8a410cf15d4b6fffab57c8b5f20574d6e18)
 a
a  The virtuální posunutí
The virtuální posunutí ![{ displaystyle delta gamma: [t_ {0}, t_ {1}] do TM}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e7f44d7c721456150544e2c246bb2be6b394c8ae)
 být tečný svazek z
být tečný svazek z  odpovídající variantě
odpovídající variantě  přiřadí[1] každému
přiřadí[1] každému ![t in [t_ {0}, t_ {1}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b698b33a7f49fc270026c5ecaaad66a0e9e588a) the tečný vektor
the tečný vektor

Z hlediska tečná mapa,

Tady ![{ displaystyle Gamma _ {*} ^ {t}: T_ {0} [- epsilon, epsilon] až T _ { Gamma (t, 0)} M = T _ { gamma (t)} M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b12003e98c00a2321c5adb819d6b6489598d4a67) je tečná mapa
je tečná mapa ![{ displaystyle Gamma ^ {t}: [- epsilon, epsilon] na M,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66857af388e796971d6de28849e9f34a8f7c13c4) kde
kde  a
a ![{ displaystyle textstyle { frac {d} {d epsilon}} { Bigl |} _ { epsilon = 0} v T_ {0} [- epsilon, epsilon].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ee73378b08df19b8f82af809c06d1da8ae8dd2f)
Vlastnosti
- Znázornění souřadnic. Li
 jsou souřadnice v libovolném grafu na a
jsou souřadnice v libovolném grafu na a  pak
pak
![{ displaystyle delta gamma (t) = součet _ {i = 1} ^ {n} { frac {d [q_ {i} ( gama (t, epsilon))]} {d epsilon} } { Biggl |} _ { epsilon = 0} cdot { frac {d} {dq_ {i}}} { Biggl |} _ { gamma (t)}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/03040a9a0724da8c0b16cc0b6559e5bec3cd5059)
- Pokud, na nějakou dobu okamžité
 a každý
a každý 
 pak pro každého
pak pro každého
- Li
 pak
pak 
Příklady
Volná částice v R3
Jedna částice volně se pohybující dovnitř  má 3 stupně volnosti. Konfigurační prostor je
má 3 stupně volnosti. Konfigurační prostor je  a
a ![{ displaystyle P (M) = C ^ { infty} ([t_ {0}, t_ {1}], M).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c087dbbba817e68fee879b05a701a9537646a51a) Pro každou cestu a variace
Pro každou cestu a variace  z
z  existuje jedinečný
existuje jedinečný  takhle
takhle  tak jako
tak jako  Podle definice
Podle definice

což vede k

Volné částice na povrchu
 částice volně se pohybující na dvojrozměrném povrchu
částice volně se pohybující na dvojrozměrném povrchu  mít
mít  stupeň svobody. Zde je konfigurační prostor
stupeň svobody. Zde je konfigurační prostor

kde  je poloměr vektoru
je poloměr vektoru  částice. Z toho vyplývá, že
částice. Z toho vyplývá, že

a každá cesta lze popsat pomocí vektorů poloměru  každé jednotlivé částice, tj.
každé jednotlivé částice, tj.

To znamená, že pro každého 

kde  Někteří autoři to vyjadřují jako
Někteří autoři to vyjadřují jako

Tuhé těleso rotující kolem pevného bodu
A tuhé tělo otáčení kolem pevného bodu bez dalších omezení má 3 stupně volnosti. Zde je konfigurační prostor  the speciální ortogonální skupina dimenze 3 (jinak známá jako Skupina 3D rotace ), a Používáme standardní notaci
the speciální ortogonální skupina dimenze 3 (jinak známá jako Skupina 3D rotace ), a Používáme standardní notaci  odkazovat na trojrozměrný lineární prostor všech šikmo symetrický trojrozměrné matice. The exponenciální mapa
odkazovat na trojrozměrný lineární prostor všech šikmo symetrický trojrozměrné matice. The exponenciální mapa  zaručuje existenci
zaručuje existenci  takové, že pro každou cestu jeho variace
takové, že pro každou cestu jeho variace  a
a ![{ displaystyle t in [t_ {0}, t_ {1}],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4847c9b0f63dc7d2c7aecba6205b2352472fc1be) existuje jedinečná cesta
existuje jedinečná cesta ![{ displaystyle Theta ^ {t} v C ^ { infty} ([- epsilon _ {0}, epsilon _ {0}], { mathfrak {so}} (3))}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf137d0b487f1689de0a4f613af52bcbdb5c5d42) takhle
takhle  a pro každého
a pro každého  Podle definice
Podle definice

Protože pro nějakou funkci ![{ displaystyle sigma: [t_ {0}, t_ {1}] to { mathfrak {so}} (3),}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0b054fedff1379eb44ac9820349f4eba5da688b)
 , tak jako
, tak jako  ,
,

Viz také
Reference