Minimalizace přesné funkční energie tenké desky by vedla k systému nelineárních rovnic. V praxi se tedy často používá aproximace, která vede k lineárním soustavám rovnic.[1][3][4] Aproximace je odvozena za předpokladu, že gradient je 0. Kdykoli the první základní forma mapování povrchu je matice identity a druhá základní forma je
.
Můžeme použít vzorec pro střední zakřivení[5] určit to a vzorec pro Gaussovo zakřivení[5] (kde a jsou determinanty druhé a první základní formy) Od té doby a [5] integrand přesného TPEF se rovná Výrazy, které jsme právě vypočítali pro střední zakřivení a Gaussovo zakřivení jako funkce parciálních derivací ukazují, že integrand přesného TPEF je
Přibližná funkční energie tenké desky je tedy
Rotační invariance
Otáčení (x, y) o theta kolem osy z do (X, Y)
Původní povrch s bodem (x, y)
Otočený povrch s otočeným bodem (X, Y)
TPEF je rotačně neměnný. To znamená, že pokud jsou všechny body povrchu jsou otočeny o úhel o - osa, TPEF v každém bodě plochy se rovná TPEF rotovaného povrchu při rotaci Vzorec pro a rotace o úhel o -os je
(1)
Skutečnost, že hodnota povrchu při rovná se hodnota otočené plochy na otočené je vyjádřeno matematicky rovnicí
kde je inverzní rotace, tj. Tak a z toho plyne pravidlo řetězu
(2)
V rovnici (2), prostředek prostředek prostředek a prostředek Rovnice (2) a všechny následující rovnice v této části používají netenzorovou konvenci součtu, to znamená, že součty jsou převzaty za opakované indexy v termínu, i když jsou oba indexy indexy. Pravidlo řetězu je také nutné k rozlišení rovnice (2) od té doby je vlastně složení
.
Zaměňte názvy indexů a výnosy
(3)
Rozšíření součtu pro každý pár výnosy
Výpočet TPEF pro výnosy rotovaného povrchu
(4)
Vkládání koeficientů rotační matice z rovnice (1) do pravé strany rovnice (4) zjednodušuje to
Přizpůsobení dat
Lze použít přibližnou funkční energii tenké desky B-spline povrchy k rozptýlení 1D dat na 2D mřížce (například data digitálního modelu terénu).[6][3] Zavolejte body mřížky pro (s a ) a datové hodnoty Aby se vešel jednotný B-spline k datům, rovnice
(5)
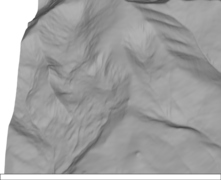
(kde je „vyhlazovací parametr“) je minimalizován. Větší hodnoty Výsledkem je hladší povrch a menší hodnoty zajistí přesnější přizpůsobení datům. Následující obrázky ilustrují výsledky přizpůsobení B-spline povrchu některým datům terénu pomocí této metody.
Původní data terénu
Vybavený B-spline povrch s velkou lambdou a více vyhlazováním
Vybavený povrch B-spline s menší lambdou a méně vyhlazováním
The vyhlazovací spline tenká deska také minimalizuje rovnici (5), ale výpočet je mnohem dražší než B-spline a ne tak plynulý (je to jen v „centrech“ a má tam neomezené druhé deriváty).






















![{ displaystyle J [f] = int _ {y_ {0}} ^ {y_ {1}} int _ {x_ {0}} ^ {x_ {1}} f_ {xx} ^ {2} + 2f_ {xy} ^ {2} + f_ {yy} ^ {2} , dx , dy.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9d4865782ac7b5c40475cd59e1338da871f079a0)


































![{ displaystyle x_ {i} v [a, b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f630ef184431750a49fac9e05f35ae071eae5632)
![{ displaystyle y_ {i} v [c, d]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b424e6d3a696118b276b7ba90784b794e3d427d8)