Uvolněná křižovatka - Relaxed intersection - Wikipedia
The uvolněná křižovatka z m množiny odpovídá klasickému průsečíku mezi množinami kromě toho, že je povoleno uvolnit několik množin, aby se zabránilo prázdné křižovatce. tento pojem lze použít k řešení Omezuje problémy spokojenosti které jsou v rozporu s uvolnění malého počtu omezení.Když přístup s omezenou chybou je považován za odhad parametrů, uvolněná křižovatka umožňuje být vůči některým robustní odlehlé hodnoty.
Definice
The q-relaxovaná křižovatka m podmnožinyz , označenoje množina všechkteré patří všems výjimkouTuto definici ilustruje obrázek 1.







Definovat

My máme
![{ displaystyle X ^ { {q }} = lambda ^ {- 1} ([m-q, m]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a061a3400e3891d6b2019b6f5577398e3af8766)
Charakterizace Q-uvolněné křižovatky je tedy a nastavit inverzi problém.[1]
Příklad
Zvažte 8 intervalů:
![{ displaystyle X_ {1} = [1,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/af99892b7ed95bc8b01972b7be903134c2cba0f6)
![{ displaystyle X_ {2} = [2,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f9531f6c8b6ff361af716c5c8155d0cd3007425b)
![{ displaystyle X_ {3} = [2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba7b91e36dc6f2c88dfaa80d1ee0bf336644c5c7)
![{ displaystyle X_ {4} = [6,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fce11a196f5e840bf955d7d7bffb4c8cc86cf62)
![{ displaystyle X_ {5} = [3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6dd8dafdc016bd7fb9b7fcefe19a7a4dc7d471fb)
![{ displaystyle X_ {6} = [3,7].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/562b9e580672a7c75318ac96a7995ec3fab13587)
My máme

![{ displaystyle X ^ { {1 }} = [3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d7928014128a53893e7d057601d027b84c9f9a0b)
![{ displaystyle X ^ { {2 }} = [3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80dac0757559626654549f071041b301a8f90621)
![{ displaystyle X ^ { {3 }} = [2,4] pohár [6,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ece0be4f2d5a10db46776a9c106ca65b79b96d4)
![{ displaystyle X ^ { {4 }} = [2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b3fc1592c25b36e319d639b0f5b52fb1e7b885fc)
![{ displaystyle X ^ { {5 }} = [1,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/48f7fda52531e256cee2b6d9440d64ce21be8dae)
![{ displaystyle X ^ { {6 }} =] - infty, infty [.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd443cc01f235d00232b0e04e637bff1a3f723b5)
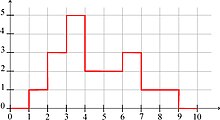
Uvolněná křižovatka intervalů
Uvolněná křižovatka intervalů není nutný interval. Vezmeme tedy intervalový trup výsledku. Li Jsou to intervaly, uvolněnou křižovatku lze vypočítat se složitostí m.log (m) pomocí Marzullov algoritmus. Stačí roztřídit všechny dolní a horní meze m intervaly představující funkci . Pak sadu snadno získáme

![{ displaystyle X ^ { {q }} = lambda ^ {- 1} ([m-q, m])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/294b77be8504fee0a62cbc855b66de2badd9b759)
což odpovídá sjednocení intervalů. Potom vrátíme ten nejmenší interval, který toto sjednocení obsahuje.
Obrázek 2 ukazuje funkcispojené s předchozím příkladem.

Uvolněná křižovatka krabic
Vypočítat q-relaxovaná křižovatka m krabice, promítáme vše m krabice s ohledem na n osy. Pro každou z n skupiny m intervaly vypočítáme q-relaxovaná křižovatka. Vracíme kartézský součin n výsledné intervaly.[2]Obrázek 3 poskytuje ilustraci 4-uvolněného průniku 6 polí. Každý bod tered boxu patří 4 ze 6 boxů.

Uvolněná unie
The q-relaxed union of je definováno

Všimněte si, že když q= 0, uvolněná unie / křižovatka odpovídá klasickému spojení / křižovatce. Přesněji, máme

a

De Morganův zákon
Li označuje doplňkovou sadu , my máme



Jako následek

Uvolnění dodavatelů
Nechat být m dodavatelé pro sady ,pak

![{ displaystyle C ([x]) = bigcap ^ { {q }} C_ {i} ([x]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/788587729f7e8ca9fb9fe1fdd1102cecdc2a0f1d)
je dodavatelem společnosti a

![{ displaystyle { overline {C}} ([x]) = bigcap ^ { {m-q-1 }} { overline {C}} _ {i} ([x])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d59a6070cd4b8efebd4b14a71f7d2d0497ae2d7b)
je dodavatelem společnosti , kde


jsou dodavateli pro

V kombinaci s a rozvětvené a vázané algoritmus jako např SIVIA (Nastavit inverzi pomocí intervalové analýzy), q-relaxedintersection of m podmnožiny lze vypočítat.
Aplikace na odhad omezené chyby
The q-relaxovanou křižovatku lze použít pro robustní lokalizaci[3][4]nebo pro sledování.[5]
Robustní pozorovatelé mohou být také implementováni pomocí uvolněných křižovatek, aby byli robustní vzhledem k odlehlým hodnotám.[6]
Navrhujeme zde jednoduchý příklad[7]pro ilustraci metody. Zvažte model ijehož výstup je dán vztahem

kde . Předpokládejme, že máme

![{ displaystyle f_ {i} (p) v [y_ {i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64f73d68f14eabca9ecdda9f468cc96106ecc7bd)
kde a jsou uvedeny v následujícím seznamu

![{ displaystyle [y_ {i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0733aa435bd20b12b259b38350ab7b3e2bd2a9d)
![{ displaystyle {(1, [0; 0,2]), (2, [0,3; 2]), (3, [0,3; 2]), (4, [0,1; 0,2]), (5, [0,4 ; 2]), (6, [- 1; 0,1]) }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eefb2caf9e7b28cf4e0a7f3c3f7a3524bc186ba7)
Sady pro různé jsou zobrazeny na obrázku 4.


Reference
- ^ Jaulin, L .; Walter, E .; Didrit, O. (1996). Zaručené robustní nelineární ohraničení parametrů (PDF). In Proceedings of CESA'96 IMACS Multiconference (Symposium on Modeling, Analysis and Simulation).
- ^ Jaulin, L .; Walter, E. (2002). "Zaručený robustní nelineární odhad minimaxu" (PDF). Transakce IEEE na automatickém ovládání. 47.
- ^ Kieffer, M .; Walter, E. (2013). Zaručená charakterizace přesných neasyymotických oblastí spolehlivosti v nelineárním odhadu parametrů (PDF). In Proceedings of IFAC Symposium on Nonlinear Control Systems, Toulouse: France (2013).
- ^ Drevelle, V .; Bonnifait, Ph. (2011). „Přístup členství v sadě pro vysoce integrované výškově podporované satelitní určování polohy“. GPS řešení. 15 (4).
- ^ Langerwisch, M .; Wagner, B. (2012). "Zaručené sledování mobilních robotů pomocí robustního šíření omezení intervalu". Inteligentní robotika a aplikace..
- ^ Jaulin, L. (2009). „Robustní odhad stavu členství; Aplikace pro podvodní robotiku“ (PDF). Automatika. 45: 202–206. doi:10.1016 / j.automatica.2008.06.013.
- ^ Jaulin, L .; Kieffer, M .; Walter, E .; Meizel, D. (2002). „Zaručený robustní nelineární odhad s lokalizací aplikace na robota“ (PDF). Transakce IEEE na systémech, člověku a kybernetice; Část C Aplikace a recenze. 32. Archivovány od originál (PDF) dne 2011-04-28.