Pole Routh je a tabulková metoda umožňující jednomu zřídit stabilita systému využívajícího pouze koeficienty charakteristiky polynomiální. Středem pole návrh řídicích systémů, Routh – Hurwitzova věta a Routh pole se objeví pomocí Euklidovský algoritmus a Sturmova věta při hodnocení Cauchyho indexy.
Cauchyho index
Vzhledem k systému:

Za předpokladu, že žádné kořeny  ležet na imaginární ose a nechat
ležet na imaginární ose a nechat
 = Počet kořenů se zápornými reálnými částmi a
= Počet kořenů se zápornými reálnými částmi a = Počet kořenů s pozitivními skutečnými částmi
= Počet kořenů s pozitivními skutečnými částmi
pak máme

Vyjadřování  v polární formě, máme
v polární formě, máme

kde
![ho (x) = {sqrt {{mathfrak {Re}} ^ {2} [f (x)] + {mathfrak {Im}} ^ {2} [f (x)]}} quad (5)](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
a
![heta (x) = an ^ {{- 1}} {ig (} {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)] {ig)} quad (6)](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)
od (2) všimněte si toho

kde

Nyní, když ith kořen má pozitivní skutečnou část, pak (pomocí zápisu y = (RE [y], IM [y]))
![{displaystyle {egin {aligned} heta _ {r_ {i}} (x) {ig |} _ {x = -jinfty} & = angle (x-r_ {i}) {ig |} _ {x = -jinfty } & = úhel (0- {mathfrak {Re}} [r_ {i}], - infty - {mathfrak {Im}} [r_ {i}]) & = úhel (- | {mathfrak {Re}} [r_ {i}] |, -infty) & = pi + lim _ {phi o infty} an ^ {- 1} phi = {frac {3pi} {2}} quad (9) end {aligned}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
a
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = j0} = úhel (- | {mathfrak {Re}} [r_ {i}] |, 0) = pi - an ^ { -1} 0 = pi quad (10)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
a
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = jinfty} = úhel (- | {mathfrak {Re}} [r_ {i}] |, infty) = pi -lim _ { phi o infty} an ^ {- 1} phi = {frac {pi} {2}} quad (11)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
Podobně, pokud ith kořen má negativní skutečnou část,
![{displaystyle {egin {aligned} heta _ {r_ {i}} (x) {ig |} _ {x = -jinfty} & = angle (x-r_ {i}) {ig |} _ {x = -jinfty } & = úhel (0- {mathfrak {Re}} [r_ {i}], - infty - {mathfrak {Im}} [r_ {i}]) & = úhel (| {mathfrak {Re}} [ r_ {i}] |, -infty) & = 0-lim _ {phi o infty} an ^ {1} phi = - {frac {pi} {2}} quad (12) end {aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb66015512b6985b691bd082240e95221662faa4)
a
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = j0} = úhel (| {mathfrak {Re}} [r_ {i}] |, 0) = an ^ {- 1} 0 = 0, čtyřkolka (13)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
a
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = jinfty} = úhel (| {mathfrak {Re}} [r_ {i}] |, infty) = lim _ {phi o infty } an ^ {- 1} phi = {frac {pi} {2}}, quad (14)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)
Zjistili jsme, že od (9) do (11)  když ith kořen má pozitivní skutečnou část a od (12) do (14) to zjistíme
když ith kořen má pozitivní skutečnou část a od (12) do (14) to zjistíme  když ith kořen má negativní skutečnou část. Tím pádem,
když ith kořen má negativní skutečnou část. Tím pádem,

Pokud tedy definujeme

pak máme vztah

a kombinace (3) a (17) nám dává
 a
a 
Proto vzhledem k rovnici stupně  musíme tuto funkci pouze vyhodnotit
musíme tuto funkci pouze vyhodnotit  určit , počet kořenů se zápornými reálnými částmi a , počet kořenů s kladnými reálnými částmi.
určit , počet kořenů se zápornými reálnými částmi a , počet kořenů s kladnými reálnými částmi.
 |
| Obrázek 1 |
 proti proti  |
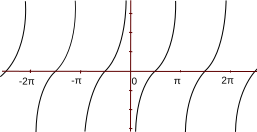
V souladu s (6) a obrázkem 1 je graf vs. , různé  v intervalu (a, b) kde
v intervalu (a, b) kde  a
a  jsou celočíselné násobky
jsou celočíselné násobky  , tato variace způsobující funkci
, tato variace způsobující funkci  se zvýšil o , označuje, že v průběhu cestování z bodu a do bodu b, „skočil“ z
se zvýšil o , označuje, že v průběhu cestování z bodu a do bodu b, „skočil“ z  na
na  ještě jednou, než skočil na . Podobně, když se budeme lišit v průběhu intervalu (a, b) tato změna způsobuje snížit o , kde znovu je násobkem u obou
ještě jednou, než skočil na . Podobně, když se budeme lišit v průběhu intervalu (a, b) tato změna způsobuje snížit o , kde znovu je násobkem u obou  a
a  , to naznačuje
, to naznačuje ![{displaystyle an heta (x) = {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f) vyskočil z na ještě jednou, než skočil na tak jako se v uvedeném intervalu měnila.
vyskočil z na ještě jednou, než skočil na tak jako se v uvedeném intervalu měnila.
Tím pádem,  je krát rozdíl mezi počtem bodů, ve kterém
je krát rozdíl mezi počtem bodů, ve kterém ![{displaystyle {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c) skočí z na a počet bodů, ve kterých skočí z na tak jako rozsahy v intervalu
skočí z na a počet bodů, ve kterých skočí z na tak jako rozsahy v intervalu  za předpokladu, že v
za předpokladu, že v  ,
, ![{displaystyle an [heta (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef) je definováno.
je definováno.
 |
| Obrázek 2 |
 proti proti |
V případě, že je výchozím bodem nesoulad (tj.  , i = 0, 1, 2, ...) konečný bod bude také na nesrovnalosti, podle rovnice (17) (od je celé číslo a je celé číslo, bude celé číslo). V tomto případě můžeme dosáhnout stejného indexu (rozdíl v kladných a záporných skokech) posunutím os tangenciální funkce o
, i = 0, 1, 2, ...) konečný bod bude také na nesrovnalosti, podle rovnice (17) (od je celé číslo a je celé číslo, bude celé číslo). V tomto případě můžeme dosáhnout stejného indexu (rozdíl v kladných a záporných skokech) posunutím os tangenciální funkce o  , přidáním na . Náš index je tedy nyní plně definován pro jakoukoli kombinaci koeficientů v hodnocením
, přidáním na . Náš index je tedy nyní plně definován pro jakoukoli kombinaci koeficientů v hodnocením ![{displaystyle an [heta] = {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8) za interval (a, b) =
za interval (a, b) =  když náš výchozí (a tedy i koncový) bod není nesrovnalost, a to hodnocením
když náš výchozí (a tedy i koncový) bod není nesrovnalost, a to hodnocením
![{displaystyle an [heta '(x)] = an [heta + pi / 2] = - cot [heta (x)] = - {mathfrak {Re}} [f (x)] / {mathfrak {Im}} [ f (x)] quad (19)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)
v uvedeném intervalu, když je náš výchozí bod v nesrovnalosti.
Tento rozdíl, , negativních a pozitivních nesrovnalostí při skákání, které se vyskytly při procházení z  na
na  se nazývá Cauchyův index tečny fázového úhlu, přičemž fázový úhel je nebo
se nazývá Cauchyův index tečny fázového úhlu, přičemž fázový úhel je nebo  , v závislosti na
, v závislosti na  je celočíselný násobek nebo ne.
je celočíselný násobek nebo ne.
Kritérium Routh
Abychom odvodili Routhovo kritérium, nejprve použijeme jinou notaci k rozlišení mezi sudými a lichými členy :

Nyní máme:

Proto pokud je dokonce,
![{displaystyle {egin {aligned} f (jomega) & = (- 1) ^ {n / 2} {ig [} a_ {0} omega ^ {n} -a_ {1} omega ^ {n-2} + a_ {2} omega ^ {n-4} -cdots {ig]} & {} quad (23) & + j (-1) ^ {(n / 2) -1} {ig [} b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + b_ {2} omega ^ {n-5} -cdots {ig]} & {} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e495902015ba0b7f57501e6d3d82ee9ab5ef62a)
a pokud je liché:
![{displaystyle {egin {aligned} f (jomega) & = j (-1) ^ {(n-1) / 2} {ig [} a_ {0} omega ^ {n} -a_ {1} omega ^ {n -2} + a_ {2} omega ^ {n-4} -cdots {ig]} & {} quad (24) & + (- 1) ^ {(n-1) / 2} {ig [} b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + b_ {2} omega ^ {n-5} -cdots {ig]} & {} end {zarovnáno}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2031e504dd4c89445e158080035a39a2e0e17c2b)
Nyní pozorujte, že pokud je liché celé číslo, pak (3)  je zvláštní. Li je tedy liché celé číslo
je zvláštní. Li je tedy liché celé číslo  je také zvláštní. Stejný argument podobně ukazuje, že když je dokonce, bude rovnoměrné. Rovnice (15) ukazuje, že pokud je dokonce, je celočíselný násobek . Proto, je definováno pro sudý, a je tedy správným indexem, který se použije, když n je sudé, a podobně
je také zvláštní. Stejný argument podobně ukazuje, že když je dokonce, bude rovnoměrné. Rovnice (15) ukazuje, že pokud je dokonce, je celočíselný násobek . Proto, je definováno pro sudý, a je tedy správným indexem, který se použije, když n je sudé, a podobně  je definováno pro zvláštní, což je v tomto druhém případě správný index.
je definováno pro zvláštní, což je v tomto druhém případě správný index.
Tedy z (6) a (23), pro dokonce:
![{displaystyle Delta = I _ {- infty} ^ {+ infty} {frac {- {mathfrak {Im}} [f (x)]} {{mathfrak {Re}} [f (x)]}} = I _ {- infty} ^ {+ infty} {frac {b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + cdots} {a_ {0} omega ^ {n} -a_ {1 } omega ^ {n-2} + ldots}} čtyřkolka (25)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9829781584a0ac5eac8c828f3b075583bb496da)
a od (19) a (24) pro zvláštní:
![{displaystyle Delta = I _ {- infty} ^ {+ infty} {frac {{mathfrak {Re}} [f (x)]} {{mathfrak {Im}} [f (x)]}} = I _ {- infty } ^ {+ infty} {frac {b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + ldots} {a_ {0} omega ^ {n} -a_ {1} omega ^ {n-2} + ldots}} quad (26)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d8786a9be2f8a0f8cff61b436453fa922966c5d)
Lo a hle, hodnotíme stejný Cauchyův index pro oba:

Sturmova věta
Sturm dává nám metodu hodnocení  . Jeho věta uvádí následovně:
. Jeho věta uvádí následovně:
Vzhledem k posloupnosti polynomů  kde:
kde:
1) Pokud  pak
pak  ,
,  , a
, a ![{displaystyle operatorname {sign} [f_ {k-1} (x)] = - operatorname {sign} [f_ {k + 1} (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a866748052776183bc0b2820b98b37558342d6a5)
2)  pro
pro 
a definujeme  jako počet změn znaménka v pořadí pro pevnou hodnotu , pak:
jako počet změn znaménka v pořadí pro pevnou hodnotu , pak:

Sekvence splňující tyto požadavky se získá pomocí Euklidovský algoritmus, což je následující:
Začínání s  a
a  a označující zbytek
a označující zbytek  podle
podle  a podobně označující zbytek
a podobně označující zbytek  podle
podle  a tak dále získáváme vztahy:
a tak dále získáváme vztahy:

nebo obecně

kde poslední nenulový zbytek,  bude tedy nejvyšším společným faktorem
bude tedy nejvyšším společným faktorem  . Lze pozorovat, že takto konstruovaná sekvence splní podmínky Sturmovy věty, a proto byl vyvinut algoritmus pro určení uvedeného indexu.
. Lze pozorovat, že takto konstruovaná sekvence splní podmínky Sturmovy věty, a proto byl vyvinut algoritmus pro určení uvedeného indexu.
Je to v použití Sturmovy věty (28) na (29) pomocí výše uvedeného euklidovského algoritmu, kde je vytvořena Routhova matice.
Dostaneme

a identifikaci koeficientů tohoto zbytku do  ,
,  ,
,  ,
,  , a tak dále, tvoří náš vytvořený zbytek
, a tak dále, tvoří náš vytvořený zbytek

kde

Pokračování v euklidovském algoritmu o těchto nových koeficientech nám dává

kde opět označíme koeficienty zbytku  podle
podle  ,
,  ,
,  ,
,  ,
,
takže náš vytvořený zbytek

a dává nám

Řádky pole Routh jsou určeny přesně tímto algoritmem, když jsou použity na koeficienty (20). Pozorování, které stojí za zmínku, je, že v běžném případě polynomy  a
a  mít jako nejvyšší společný faktor
mít jako nejvyšší společný faktor  a tak tam bude polynomy v řetězci .
a tak tam bude polynomy v řetězci .
Všimněte si nyní, že při určování znaků členů posloupnosti polynomů že v  dominující síla
dominující síla  bude první člen každého z těchto polynomů, a tedy pouze tyto koeficienty odpovídající nejvyšším mocninám v
bude první člen každého z těchto polynomů, a tedy pouze tyto koeficienty odpovídající nejvyšším mocninám v  , a , což jsou
, a , což jsou  ,
,  , , , ... určit známky , , ..., v .
, , , ... určit známky , , ..., v .
Takže máme  to je
to je  je počet změn znaménka v sekvenci
je počet změn znaménka v sekvenci  ,
,  ,
,  , ... což je počet změn znaménka v sekvenci , , , , ... a
, ... což je počet změn znaménka v sekvenci , , , , ... a  ; to je
; to je  je počet změn znaménka v sekvenci
je počet změn znaménka v sekvenci  ,
,  ,
,  , ... což je počet změn znaménka v sekvenci ,
, ... což je počet změn znaménka v sekvenci ,  , ,
, ,  , ...
, ...
Od našeho řetězce , , , , ... budu mít členů je jasné, že  protože uvnitř
protože uvnitř  pokud jde od na uvnitř nedošlo ke změně znaménka
pokud jde od na uvnitř nedošlo ke změně znaménka  jít z na jeden má, a podobně pro všechny přechody (neexistují žádné podmínky rovné nule), které nám dávají celkové znaménkové změny.
jít z na jeden má, a podobně pro všechny přechody (neexistují žádné podmínky rovné nule), které nám dávají celkové znaménkové změny.
Tak jako  a
a  a od (18)
a od (18)  , máme to
, máme to  a odvodili Routhovu větu -
a odvodili Routhovu větu -
Počet kořenů skutečného polynomu  které leží v pravé polovině roviny
které leží v pravé polovině roviny  se rovná počtu změn znaménka v prvním sloupci schématu Routh.
se rovná počtu změn znaménka v prvním sloupci schématu Routh.
A pro stabilní případ, kdy  pak
pak  podle kterého máme Routhovo slavné kritérium:
podle kterého máme Routhovo slavné kritérium:
Aby všechny kořeny polynomu abychom měli záporné reálné části, je nutné a dostatečné, aby všechny prvky v prvním sloupci Routhova schématu byly odlišné od nuly a stejného znaménka.
Reference
- Hurwitz, A., „O podmínkách, za kterých má rovnice pouze kořeny se zápornými reálnými částmi“, Rpt. in Selected Papers on Mathematical Trends in Control Theory, Ed. R. T. Ballman a kol. New York: Dover 1964
- Routh, E. J., Pojednání o stabilitě daného stavu pohybu. London: Macmillan, 1877. Rpt. in Stability of Motion, Ed. A. T. Fuller. London: Taylor & Francis, 1975
- Felix Gantmacher (J.L. Brenner translator) (1959) Aplikace teorie matic, str. 177–80, New York: Interscience.

