Otočné třmeny - Rotating calipers

v výpočetní geometrie, metoda rotační třmeny je návrh algoritmu technika, kterou lze použít k řešení optimalizačních problémů, včetně zjištění šířky nebo průměr množiny bodů.
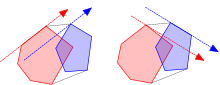
Metoda je tak pojmenována, protože myšlenka je analogická otáčení pružinou posuvné měřítko noniem kolem vnějšku a konvexní mnohoúhelník.[1] Pokaždé, když jedna čepel třmenu leží naplocho proti okraji mnohoúhelníku, tvoří antipodální pár špičkou nebo hranou dotýkající se protilehlé čepele. Úplná „rotace“ třmenu kolem mnohoúhelníku detekuje všechny antipodální páry; množina všech párů, nahlížená jako graf, tvoří a thrackle. Metodu otáčení třmenů lze interpretovat jako projektivní duální a algoritmus zatáčkové čáry ve kterém je tažení spíše napříč svahy čar než napříč X- nebo y- souřadnice bodů.
Dějiny

Metoda rotujících třmenů byla poprvé použita při disertační práci Michael Shamos v roce 1978.[2] Shamos používá tuto metodu ke generování všech antipodální dvojice bodů na a konvexní mnohoúhelník a vypočítat průměr konvexního mnohoúhelníku v čas. Godfried Toussaint vytvořil frázi „rotující posuvná měřítka“ a také prokázal, že metoda byla použitelná při řešení mnoha dalších problémů s výpočetní geometrií.[3]

Shamosův algoritmus
Shamos ve své disertační práci (str. 77–82) uvedl následující algoritmus pro metodu rotujících třmenů, který generoval všechny antipodální páry vrcholů na konvexním polygonu:[2]
/ * p [] je ve standardní formě, tj. proti směru hodinových ručiček, odlišné vrcholy, žádné kolineární vrcholy. ANGLE (m, n) je procedura, která vrací úhel ve směru hodinových ručiček zametl paprskem, jak se otáčí z polohy rovnoběžné do směrovaného segmentu Pm, Pm + 1 do polohy rovnoběžné s Pn, Pn + 1 Předpokládáme, že všechny indexy jsou redukovány na mod N (takže N + 1 = 1).*/GetAllAntiPodalPair(p[1..n]) // Najděte první antipodální pár umístěním vrcholu proti P1 i = 1 j = 2 zatímco úhel(i, j) < pi j++ výtěžek i, j / * Nyní pokračujte kolem mnohoúhelníku s přihlédnutím k možná rovnoběžné hrany. Linka L prochází Pi, Pi + 1 a M prochází Pj, Pj + 1 */ // Smyčka na j, dokud nebude naskenováno celé P proud = i zatímco j != n -li úhel(proud, i + 1) <= úhel(proud, j + 1) j++ proud = j jiný i++ proud = i výtěžek i, j // Nyní se postarejte o rovnoběžné hrany -li úhel(proud, i + 1) = úhel(proud, j + 1) výtěžek i + 1, j výtěžek i, j + 1 výtěžek i + 1, j + 1 -li proud = i j++ jiný i++Další verze tohoto algoritmu se objevila v textu Preparata a Shamos v roce 1985, která zabránila výpočtu úhlů:[4]
GetAllAntiPodalPair(p[1..n]) i0 = n i = 1 j = i + 1 zatímco (Plocha(i, i + 1, j + 1) > Plocha(i, i + 1, j)) j = j + 1 j0 = j zatímco (j != i0) i = i + 1 výtěžek i, j zatímco (Plocha(i, i + 1, j + 1) > Plocha(i, i + 1, j) j = j + 1 -li ((i, j) != (j0, i0)) výtěžek i, j jiný vrátit se -li (Plocha(j, i + 1, j + 1) = Plocha(i, i + 1, j)) -li ((i, j) != (j0, i0)) výtěžek i, j + 1 jiný výtěžek i + 1, jAplikace
Pirzadeh[5] popisuje různé aplikace metody rotačních třmenů.
Vzdálenosti
- Průměr (maximální šířka) konvexního mnohoúhelníku[6][7]
- Šířka (minimální šířka ) konvexního mnohoúhelníku[8]
- Maximální vzdálenost mezi dvěma konvexními polygony[9][10]
- Minimální vzdálenost mezi dvěma konvexními polygony[11][12]
- Nejširší prázdný (nebo oddělovací) pás mezi dvěma konvexními polygony (zjednodušená nízkodimenzionální varianta problému vznikajícího v podporovat vektorový stroj založené na strojovém učení)
- Grenanderova vzdálenost mezi dvěma konvexními polygony[13]
- Optimální oddělení pásu (používané v lékařském zobrazování a modelování těles)[14]
Ohraničující krabice
- Minimální plocha orientovaný ohraničovací rámeček
- Minimální obvod orientovaný ohraničovací rámeček
Triangulace
- Cibule triangulace
- Spirála triangulace
- Čtyřúhelník
- Pěkná triangulace
- Problém s uměleckou galerií
- Problém s optimalizací umístění klínu[15]
Multi-polygonové operace
- Spojení dvou konvexních polygonů
- Společné tangenty dvou konvexních mnohoúhelníků
- Průnik dvou konvexních mnohoúhelníků[16]
- Kritické linie podpory dvou konvexních polygonů
- Vektorové součty (nebo Minkowského součet) dvou konvexních mnohoúhelníků[17]
- Konvexní trup dvou konvexních mnohoúhelníků
Traversals
Ostatní
- Neparametrická pravidla rozhodování pro strojově naučenou klasifikaci[21]
- Optimalizace clonového úhlu pro problémy s viditelností v počítačovém vidění[22]
- Nalezení nejdelších buněk v milionech biologických buněk[23]
- Porovnání přesnosti dvou lidí na střelnici
- Klasifikujte části mozku ze skenovaných obrázků
Viz také
Reference
- ^ „Rotující posuvná měřítka“ na domovské stránce Toussainta
- ^ A b Shamos, Michael (1978). „Výpočetní geometrie“ (PDF). Univerzita Yale. str. 76–81.
- ^ Toussaint, Godfried T. (1983). "Řešení geometrických problémů s rotujícími třmeny". Proc. MELECON '83, Atény. CiteSeerX 10.1.1.155.5671. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Shamos, Franco P. Preparata, Michael Ian (1985). Výpočetní geometrie Úvod. New York, NY: Springer New York. ISBN 978-1-4612-7010-2.
- ^ Pirzadeh, Hormoz (1999). "Výpočetní geometrie s rotujícími třmeny". McGillova knihovna.
- ^ Binay K. Bhattacharya a Godfried T. Toussaint, „Rychlé algoritmy pro výpočet průměru konečné plošné množiny“ Vizuální počítač, Sv. 3, č. 6, květen 1988, str. 379–388.
- ^ Binay K. Bhattacharya a Godfried T. Toussaint, „Protiklad k algoritmu průměru pro konvexní polygony,“ Transakce IEEE na analýze vzorů a strojové inteligenci, Sv. PAMI-4, č. 3, květen 1982, str. 306–309.
- ^ Michael E. Houle a Godfried T. Toussaint, „Výpočet šířky sady,“ Transakce IEEE na analýze vzorů a inteligenci strojů, Sv. 10, č. 5, září 1988, s. 761–765.
- ^ Godfried T. Toussaint a Jim A. McAlear, „Jednoduchý O (n log n) algoritmus pro zjištění maximální vzdálenosti mezi dvěma konečnými rovinnými množinami, “ Písmena pro rozpoznávání vzorů, Sv. 1, 1982, s. 21–24.
- ^ Binay K. Bhattacharya a Godfried T. Toussaint, „Efektivní algoritmy pro výpočet maximální vzdálenosti mezi dvěma konečnými rovinnými množinami,“ Journal of Algorithms, sv. 14, 1983, s. 121–136.
- ^ Godfried T. Toussaint a Binay K. Bhattacharya, „Optimální algoritmy pro výpočet minimální vzdálenosti mezi dvěma konečnými rovinnými množinami,“ Písmena pro rozpoznávání vzorů, sv. 2, prosinec 1983, s. 79–82.
- ^ „Rotující posuvná měřítka“. 2015-03-30. Archivovány od originálu na 2015-03-30. Citováno 2017-03-22.CS1 maint: BOT: stav původní adresy URL neznámý (odkaz)
- ^ MARTINEZ, HUGO M. (1. ledna 1978). „Recenze:„ PATTERN SYNTHESIS “, autor: U. Grenander, Springer-Verlag, New York, 1976. 509 stran“. International Journal of General Systems. 4 (2): 126–127. doi:10.1080/03081077808960672. ISSN 0308-1079.
- ^ Barequet a Wolfers (1998). "Optimalizace pásu oddělujícího dva polygony". Grafické modely a zpracování obrazu. 60 (3): 214–221. doi:10.1006 / gmip.1998.0470.
- ^ Teichmann, Marek (1989). „Problémy s optimalizací umístění klínu“. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Godfried T. Toussaint, „Jednoduchý lineární algoritmus pro protínání konvexních polygonů, Vizuální počítač, Sv. 1, 1985, s. 118–123.
- ^ Tomas Lozano-Perez, „Prostorové plánování: Konfigurační prostorový přístup,“ Transakce IEEE na počítačích, Sv. 32, č. 2, 1983, s. 108–120.
- ^ Binay K. Bhattacharya a Godfried T. Toussaint, „Computing shortest transversals,“ Výpočetní, sv. 46, 1991, s. 93–119.
- ^ Binay K. Bhattacharya, Jurek Czyzowicz, Peter Egyed, Ivan Stojmenovic, Godfried T. Toussaint a Jorje Urrutia, „Výpočet nejkratších průřezů množin,“ International Journal of Computational Geometry and Applications, Sv. 2, č. 4, prosinec 1992, s. 417–436.
- ^ Jean-Marc Robert a Godfried T. Toussaint, „Lineární aproximace jednoduchých objektů“ Výpočetní geometrie: Teorie a aplikace, Sv. 4, 1994, s. 27–52.
- ^ Rasson a Granville (1996). Msgstr "Geometrické nástroje v klasifikaci". Výpočetní statistika a analýza dat. 23 (1): 105–123. doi:10.1016 / S0167-9473 (96) 00024-2.
- ^ Bose, P .; Hurtado-Diaz, F .; Omaña-Pulido, E .; Snoeyink, J .; Toussaint, G. T. (01.08.2002). „Některé problémy s optimalizací clonového úhlu“. Algorithmica. 33 (4): 411–435. CiteSeerX 10.1.1.16.7118. doi:10.1007 / s00453-001-0112-9. ISSN 0178-4617.
- ^ „Nesprávné algoritmy průměru pro konvexní polygony“.