Výsledná síla - Resultant force
tento článek potřebuje další citace pro ověření. (Červen 2020) (Zjistěte, jak a kdy odstranit tuto zprávu šablony) |
v fyzika a inženýrství, a výsledná síla je singl platnost a související točivý moment získané kombinací systému sil a momentů působících na a tuhé tělo. Charakteristickým rysem výsledné síly nebo výsledné síly a točivého momentu je to, že má stejný účinek na tuhé těleso jako původní systém sil.[1] Výpočet a vizualizace výsledné síly na tělo se provádí pomocí výpočetní analýzy, nebo (v případě dostatečně jednoduchých systémů) diagram volného těla.
Místo aplikace výsledné síly určuje její přidružený točivý moment. Termín výsledná síla je třeba chápat tak, že označuje síly i krouticí momenty působící na tuhé těleso, a proto někteří tento termín používají výsledná síla-točivý moment.
Ilustrace
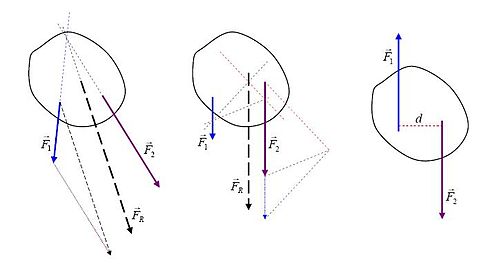
Diagram ilustruje jednoduché grafické metody pro zjištění linie použití výsledné síly jednoduchých rovinných systémů.
- Linky aplikace skutečných sil a na obrázku zleva se protínají. Po vektorové přidání se provádí "v místě " čistá síla získaný je přeložen tak, aby jeho linie aplikace prošla společným průsečíkem. S ohledem na tento bod jsou všechny momenty nulové, takže krouticí moment výsledné síly se rovná součtu momentů skutečných sil.
- Ilustrace uprostřed diagramu ukazuje dvě paralelní skutečné síly. Po přidání vektoru "na místě ", síťová síla je převedena na příslušnou linii aplikace, z čehož se stane výslednou silou." . Postup je založen na rozkladu všech sil na komponenty, u nichž se linie aplikace (světle tečkované čáry) protínají v jednom bodě (tzv. Pól, libovolně nastavený na pravé straně obrázku). Poté se argumenty z předchozího případu použijí na síly a jejich součásti k prokázání vztahů točivého momentu.
- Ilustrace zcela vpravo ukazuje a pár, dvě stejné, ale opačné síly, pro které je velikost čisté síly nulová, ale vytvářejí čistý točivý moment kde je vzdálenost mezi liniemi jejich použití. Jedná se o „čistý“ točivý moment, protože zde není výsledná síla.






Vázaný vektor
Síla působící na tělo má bod aplikace. Účinek síly je u různých bodů použití odlišný. Z tohoto důvodu se síla nazývá a vázaný vektor, což znamená, že je vázán na svůj aplikační bod.
Síly aplikované ve stejném bodě lze sečíst, aby se dosáhlo stejného účinku na tělo. Síly s různými aplikačními body však nelze sčítat a udržovat stejný účinek na tělo.
Je jednoduché změnit bod aplikace síly zavedením stejných a opačných sil do dvou různých bodů aplikace, které vytvářejí čistý točivý moment na těle. Tímto způsobem mohou být všechny síly působící na tělo přesunuty do stejného bodu aplikace s přidruženými momenty.
Systém sil na tuhé těleso se kombinuje přesunutím sil do stejného bodu aplikace a výpočtem příslušných momentů. Součet těchto sil a točivých momentů poskytuje výsledný silový moment.
Přidružený točivý moment
Pokud bod R je vybrán jako bod aplikace výsledné síly F systému n síly Fi pak přidružený točivý moment T se stanoví ze vzorců

a

Je užitečné si uvědomit, že bod aplikace R výsledné síly může být kdekoli podél linie působení F beze změny hodnoty příslušného točivého momentu. Chcete-li to vidět, přidejte vektor kF do bodu aplikace R při výpočtu souvisejícího točivého momentu,

Pravou stranu této rovnice lze rozdělit na původní vzorec pro T plus další termín včetně kF,

protože druhý člen je nulový. Chcete-li vidět toto upozornění, že F je součet vektorů Fi který přináší

hodnota přidruženého točivého momentu se tedy nezmění.
Výsledek bez točivého momentu
Je užitečné zvážit, zda existuje bod aplikace R tak, že příslušný točivý moment je nulový. Tento bod je definován vlastností

kde F je výsledná síla a Fi tvoří soustavu sil.
Všimněte si, že tato rovnice pro R má řešení pouze v případě, že součet jednotlivých momentů na pravé straně poskytne vektor, který je kolmý na F. Podmínku, že soustava sil má výslednici bez točivého momentu, lze tedy zapsat jako

Pokud je tato podmínka splněna, pak existuje bod aplikace pro výslednici, jehož výsledkem je čistá síla. Pokud tato podmínka není splněna, pak systém sil obsahuje čistý točivý moment pro každý bod aplikace.
Klíč
Síly a momenty působící na tuhé těleso lze sestavit do dvojice vektorů zvaných a klíč.[2]Pokud má soustava sil a momentů čistou výslednou sílu F a čistý výsledný točivý moment T, pak může být celý systém nahrazen silou F a libovolně umístěný pár, který poskytuje točivý moment T. Obecně, pokud F a T jsou ortogonální, je možné odvodit radiální vektor R takhle , což znamená, že jediná síla F, působící při posunutí R, může nahradit systém. Pokud má systém nulovou sílu (pouze točivý moment), nazývá se a šroub a je matematicky formulován jako teorie šroubů.[3][4]

Výsledná síla a točivý moment na tuhém tělese získané ze systému sil Fi i = 1, ..., n, je jednoduše součet jednotlivých klíčů Wi, to je

Všimněte si, že případ dvou stejných, ale opačných sil F a -F jednající v bodech A a B v uvedeném pořadí, získá výsledný W = (F-F, A×F - B× F) = (0, (A-B)×F). To ukazuje, že klíče ve tvaru W = (0, T) lze interpretovat jako čisté momenty.
Reference
- ^ H. Dadourian, Analytická mechanika pro studenty fyziky a techniky, Van Nostrand Co., Boston, MA 1913
- ^ R. M. Murray, Z. Li a S. Sastry, Matematický úvod do robotické manipulace, CRC Press, 1994
- ^ R. S. Ball, Teorie šroubů: Studie dynamiky tuhého těla, Hodges, Foster & Co., 1876
- ^ J. M. McCarthy a G. S. Soh, Geometrický design vazeb. 2. vydání, Springer 2010