Furuta kyvadlo - Furuta pendulum
tento článek potřebuje další citace pro ověření. (Červenec 2009) (Zjistěte, jak a kdy odstranit tuto zprávu šablony) |

The Furuta kyvadlo, nebo rotační obrácené kyvadlo, se skládá z poháněného ramene, které se otáčí v horizontální rovině a a kyvadlo připojené k tomuto ramenu, které se může volně otáčet ve svislé rovině. Byl vynalezen v roce 1992 v Tokijský technologický institut autor: Katsuhisa Furuta[1][2][3][4] a jeho kolegové. Je to příklad složitého nelineárního oscilátoru, o který se zajímáme teorie řídicího systému. Kyvadlo je podhodnoceno a extrémně nelineární v důsledku gravitačních sil a vazby vyplývající z Coriolis a dostředivý síly. Od té doby desítky, možná stovky prací a prací použily systém k prokázání lineárních a nelineárních zákonů řízení.[5][6][7] Systém byl také předmětem dvou textů.[8][9]
Pohybové rovnice
Navzdory velké pozornosti, které se systému dostalo, jen velmi málo publikací úspěšně odvozuje (nebo využívá) plnou dynamiku. Mnoho autorů[3][8] uvažovali pouze o rotační setrvačnosti kyvadla pro jednu hlavní osu (nebo ji zcela zanedbali[9]). Jinými slovy, tenzor setrvačnosti má pouze jeden nenulový prvek (nebo žádný) a zbývající dva diagonální členy jsou nulové. Je možné najít kyvadlový systém, kde moment setrvačnosti v jedné ze tří hlavních os je přibližně nula, ale ne dva.
Několik autorů[2][4][6][10][11][12] uvažovali o štíhlých symetrických kyvadlech, kde momenty setrvačnosti pro dvě hlavní osy jsou stejné a zbývající moment setrvačnosti je nula. Z desítek publikací zkoumaných pro tuto wiki pouze jeden konferenční příspěvek[13] a deník[14] Bylo zjištěno, že obsahují všechny tři hlavní setrvačné členy kyvadla. Oba papíry používaly a Lagrangeova formulace ale každá obsahovala drobné chyby (pravděpodobně typografické).
Zde uvedené pohybové rovnice jsou výňatkem z a papír[15] na dynamice kyvadla Furuta odvozené na University of Adelaide.
Definice
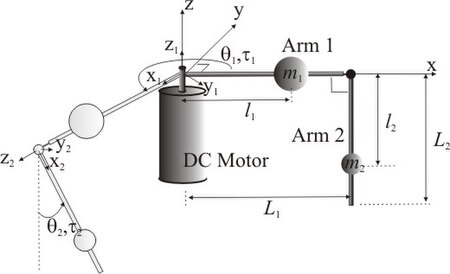
Zvažte rotační obrácené kyvadlo namontované na stejnosměrný motor, jak je znázorněno na obr. 1. Stejnosměrný motor se používá k aplikaci točivého momentu na rameno 1. Spojení mezi ramenem 1 a ramenem 2 není aktivováno, ale může se volně otáčet. Obě paže mají délky a . Paže mají masy a které se nacházejí na a respektive, což jsou délky od bodu otáčení paže k jeho těžišti. Ramena mají tenzory setrvačnosti a (o těžišti paží). Každý rotační spoj je viskózně tlumen tlumicími koeficienty a , kde je tlumení poskytované ložisky motoru a je tlumení vyplývající z kolíkové spojky mezi ramenem 1 a ramenem 2.











Pro definování vstupů, stavů a kartézských souřadnicových systémů 1 a 2 byl použit pravostranný souřadný systém. Osy souřadnic ramen 1 a ramen 2 jsou hlavními osami, takže tenzory setrvačnosti jsou úhlopříčné.
Úhlová rotace ramene 1, , se měří v horizontální rovině, kde je směr proti směru hodinových ručiček (při pohledu shora) kladný. Úhlová rotace ramene 2, , se měří ve svislé rovině, kde je směr proti směru hodinových ručiček (při pohledu zepředu) kladný. Když paže visí dolů ve stabilní rovnovážné poloze .



Točivý moment, který servomotor aplikuje na rameno 1, , je kladný ve směru proti směru hodinových ručiček (při pohledu shora). Rušivý moment, , zažívá rameno 2, kde je směr proti směru hodinových ručiček (při pohledu zepředu) kladný.

Předpoklady
Před odvozením dynamiky systému je třeba učinit řadu předpokladů. Tyto jsou:
- Hřídel motoru a rameno 1 se považují za pevně spojené a nekonečně tuhé.
- Rameno 2 se považuje za nekonečně tuhé.
- Osy souřadnic ramen 1 a ramen 2 jsou hlavními osami, takže tenzory setrvačnosti jsou úhlopříčné.
- Předpokládá se, že setrvačnost rotoru motoru je zanedbatelná. Tento výraz však lze snadno přidat k momentu setrvačnosti paže 1.
- Uvažuje se pouze viskózní tlumení. Všechny ostatní formy tlumení (například Coulomb) byly zanedbány, je však jednoduché přidat toto do konečného řídícího DE.
Nelineární pohybové rovnice
Nelineární pohybové rovnice jsou dány vztahem[15]

a

Zjednodušení
Většina Furutových kyvadel má tendenci mít dlouhá štíhlá paže, takže moment setrvačnosti podél osy paží je zanedbatelný. Většina zbraní má navíc rotační symetrii, takže momenty setrvačnosti ve dvou hlavních osách jsou stejné. Tenzory setrvačnosti lze tedy aproximovat takto:
![{oldsymbol {J}} _ {1} = diag [J _ {{1xx}}, J _ {{1yy}}, J _ {{1zz}}] = diag [0, J _ {{1}}, J _ {{1 }}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f48c4b03be29a76f82f364f8f35a0d29aa4ea2cd)
![{oldsymbol {J}} _ {2} = diag [J _ {{2xx}}, J _ {{2yy}}, J _ {{2zz}}] = diag [0, J _ {{2}}, J _ {{2 }}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/7a42759224711cdd16c2f6665a22b4c0686b8467)
Další zjednodušení lze dosáhnout provedením následujících substitucí. Celkový moment setrvačnosti ramene 1 kolem bodu otáčení (pomocí paralelní věty o průměru) je . Celkový moment setrvačnosti ramene 2 kolem jeho otočného bodu je . Nakonec definujte celkový moment setrvačnosti, který motorový rotor zažívá, když je kyvadlo (rameno 2) v rovnovážné poloze (visí svisle dolů), .



Nahrazení předchozích definic do řídících DE dává kompaktnější formu

a

Viz také
Reference
- ^ Furuta, K., Yamakita, M. a Kobayashi, S. (1992) „Swing-up control of inverted pendulum using pseudo-state feedback“, Journal of Systems and Control Engineering, 206 (6), 263-269.
- ^ A b Xu, Y., Iwase, M. a Furuta, K. (2001) „Time optimal swing-up control of single pendulum“, Journal of Dynamic Systems, Measurement, and Control, 123 (3), 518-527.
- ^ A b Furuta, K., Iwase, M. (2004) „Analýza doby výkyvu kyvadla“, Bulletin Polské akademie věd: Technické vědy, 52 (3), 153-163.
- ^ A b Iwase, M., Åström, K.J., Furuta, K. a Åkesson, J. (2006) „Analýza bezpečného ručního ovládání pomocí kyvadla Furuta“, Proceedings of the IEEE International Conference on Control Applications, 568-572.
- ^ J.Á. Acosta, „Furutovo kyvadlo: Konzervativní nelineární model pro teorii a praxi,“ Mathematical Problems in Engineering, sv. 2010, ID článku 742894, 29 stran. http://www.hindawi.com/journals/mpe/2010/742894.html
- ^ A b Åkesson, J. a Åström, K.J. (2001) „Safe Manual Control of the Furuta Pendulum“, In Proceedings 2001 IEEE International Conference on Control Applications (CCA'01), str. 890-895.
- ^ Olfati-Sabre, R. (2001) „Nelineární řízení nedostatečně aktivovaných mechanických systémů s využitím v robotice a letectví“, disertační práce, Katedra elektrotechniky a informatiky, Massachusetts Institute of Technology, Cambridge, MA. http://www.cds.caltech.edu/~olfati/thesis/
- ^ A b Fantoni, I. a Lozano, R. (2002) „Nelineární řízení poddukovaných mechanických systémů“, Springer-Verlag, Londýn.
- ^ A b Egeland, O. a Gravdahl, T. (2002) „Modelování a simulace pro automatické řízení“, Marine Cybernetics, Trondheim, Norsko, 639 stran, ISBN 82-92356-00-2.
- ^ Hirata, H., Haga, K., Anabuki, M., Ouchi, S. a Ratiroch-Anant, P. (2006) „Self-Tuning Control for Rotation Type Inverted Pendulum using Two Kinds of Adaptive Controllers“, Sborník 2006 IEEE Conference on Robotics, Automation and Mechatronics, 1-6. http://lab8.ec.u-tokai.ac.jp/RAM062.pdf
- ^ Ratiroch-Anant, P., Anabuki, M. a Hirata, H. (2004) „Self-tuning control for rotational inverted pendulum by eigenvalue approach“, Proceedings of TENCON 2004, IEEE Region 10 Conference, Volume D, 542-545. http://lab8.ec.u-tokai.ac.jp/TENCON2004_D-542.pdf
- ^ Baba, Y., Izutsu, M., Pan, Y. A Furuta, K. (2006) „Design of control method to rotate pendulum“, Proceedings of SICE-ICASE International Joint Conference, Korea.
- ^ Craig, K. a Awtar, S. (2005) „Inverted pendulum systems: rotary and arm-driven a mechatronic system design case study“, Proceedings of the 7th Mechatronics Forum International Conference, Atlanta. http://www-personal.umich.edu/~awtar/craig_awtar_1.pdf
- ^ Awtar, S., King, N., Allen, T., Bang, I., Hagan, M., Skidmore, D. a Craig, K. (2002) „Inverted pendulum systems: Rotary and arm-driven - A Mechatronic případová studie návrhu systému “, Mechatronics, 12, 357-370. http://www-personal.umich.edu/~awtar/invertedpendulum_mechatronics.pdf
- ^ A b Cazzolato, B.S a Prime, Z (2011) „On the Dynamics of the Furuta Pendulum“, Journal of Control Science and Engineering, Volume 2011 (2011), ID článku 528341, 8 stran. http://downloads.hindawi.com/journals/jcse/2011/528341.pdf