Chasqui I. - Chasqui I - Wikipedia
Tento článek má několik problémů. Prosím pomozte zlepšit to nebo diskutovat o těchto otázkách na internetu diskusní stránka. (Zjistěte, jak a kdy tyto zprávy ze šablony odebrat) (Zjistěte, jak a kdy odstranit tuto zprávu šablony)
|
| Typ mise | Vědecký |
|---|---|
| Operátor | National University of Engineering |
| ID COSPARU | 1998-067ET |
| SATCAT Ne. | 40117 |
| webová stránka | www |
| Vlastnosti kosmické lodi | |
| Autobus | 1U CubeSat |
| Odpalovací mše | 1 kilogram (2,2 lb) |
| Orbitální parametry | |
| Referenční systém | Geocentrický |
| Režim | Nízká Země |
Chasqui I. je jeden kilogram nanosatelit projekt, který byl zahájen ručně z Mezinárodní vesmírná stanice během a vesmírná procházka dne 18. srpna 2014.[1] Koncepční satelit byl vybaven dvěma kamerami, viditelnou a infračervenou, které mohly pořizovat fotografie Země.
Chasqui I byl vyvinut studenty v Peru National University of Engineering (UNI) a byl součástí vzdělávacího projektu zaměřeného na získání zkušeností a schopností při vývoji satelitů.
Název projektu odkazuje na chasqui, poslové Incká říše.
Obecné cíle
Kapacity[je zapotřebí objasnění ] UNI v satelitní technologii prostřednictvím návrhu, analýzy, montáže, integrace, testování, spuštění a provozu technologického nanosatelitu Cubesat. Plány satelitu Chasqui I zahrnovaly fotografování Země s přenosem na pozemní stanici.
Mezi konkrétní cíle patří:[Citace je zapotřebí ]
- Navazovat kontakty a podporu na jiné univerzity a / nebo instituce zapojené do těchto projektů.
- Prohloubit znalosti vznikajících informačních a komunikačních technologií.
- Vedení takových projektů v Latinské Americe.
- Demonstrovat a ověřit nové technologie.
Cíle zahrnují:[Citace je zapotřebí ]
- Návrh profilu projektu.
- Financování.
- Budování kapacit.
- Realizace laboratoře.
- Vypracování projektu.
- Integrované testování.
- Pokyny.
- Úkon
Projekt
The nanosatelit Výzkumný projekt Chasqui I je snahou zajistit Peru Přístup do vesmíru spolu s předchozími vypuštěnými satelity poskytuje příležitost otevřít nové aplikační oblasti specifické pro jeho vlastní geografickou a sociální realitu. Je to také z akademického hlediska nástroj, který usnadňuje spolupráci mezi různými fakultami univerzity a školí studenty a učitele se skutečnými zkušenostmi ze satelitu, což umožňuje technologický pokrok v leteckém a kosmickém průmyslu v zemi. Vývoj malých satelitů, jako je Chasqui I, ustupuje různým příležitostem přístupu do vesmíru s nižšími náklady a časem na vývoj. Z tohoto důvodu projevují zájem o rozvoj různé univerzity, společnosti a vládní organizace na celém světě nanosatelity které umožňují provádět experimenty a vědecké mise. Vzdělávací výhody projektu lze zdůraznit ve výcvikovém táboře pro budoucí inženýry a vědce.
Výzkumný projekt Nanosatelit Chasqui I postavil miniaturizovaný satelit založený na CubeSat technologie, hmotnost satelitu je méně než 1 kg a má objem až 1 Lt. Projekt demonstruje jeho užitečnost při zobrazování půdy, konkrétněji z peruánské oblasti, pomocí CMOS kamera která se snaží rozlišovat mezi úrodnou půdou a neobdělávanými oblastmi. Aby se minimalizovaly náklady na vývoj a konstrukci, byl Chasqui I postaven pomocí komerční komponenty. Samotná skutečnost, že se tyto komponenty používají v kosmickém prostředí, však představuje nové výzvy ve vztahu k toleranci vůči teplotě a záření a také představuje zvýšené požadavky v souvisejících oblastech nadbytek při navrhování hardwarových a softwarových komponent. Navíc Chasqui budu používat amatérská rádiová frekvence, což umožňuje přístup k celku amatérské rádio komunita může být rozmístěna po celé zemi, což zvyšuje vzdělávací potenciál projektu. Součástí projektu je také implementace a pozemní stanice který umožňuje monitorování Chasqui I, stejně jako monitorování dalších malých satelitů univerzit.
Peru má velkou geografickou rozmanitost, což ztěžuje neustálé sledování situace určitých událostí, ať už přírodních nebo způsobených člověkem, jako je trvalé tání sněhu, odlesňování Amazonie, ochrana stanovišť ohrožených druhů, boj narko-terorismus, ostraha hranic a teritoriálních vod, predikce a zmírňování přírodních katastrof atd. Právě v této souvislosti je kosmická technologie prezentována jako alternativa k řešení problémů národního zájmu. UNI se svým projektem Chasqui I podniká kroky v procesu řešení problémů jako např monitorování plodin a telekomunikace oblastech.
Projekt Chasqui I, který byl zpočátku formativní[je zapotřebí objasnění ] v přírodě se vyvinula[když? ] do technologické a vědecké výzvy pro všechny členy projektu. Očekává se[kým? ] že Chasqui I umožňuje postavit základy pro budoucí práci v oblasti malých satelitů a pro zvýšení jejich velikosti nebo počtu vést k satelitním projektům v různých kategoriích, například: komunikace, meteorologie, dálkový průzkum Země, obrázky Země, navigace a oceánografii.
Nástin modulů vývoje projektu
Moduly projektu
Mechanická struktura - EMEC

Mechanická struktura modulu výzkumné skupiny (EMEC) je odpovědná za přezkoumání současného stavu techniky, srovnávací analýzy stávajících případů s piko-satelitním designem a výrobu vlastního modelu založeného na standardu Cubesat.
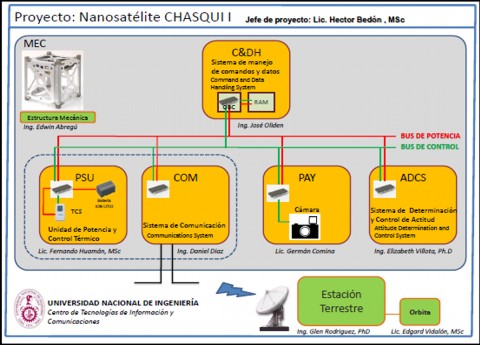
V rámci piko-satelitu budou sestaveny následující moduly: Informace o centrálním řízení a řízení (CCMI), Identifikace jednotky a Attitude Control (DCA), Imaging Management System (SIMA), Unit Power a Tepelná regulace (PCT) a komunikační systém (SICOM).
Centrální kontrola a správa informací - CCMI
Tento modul spravuje a sleduje informace ze všech subsystémů Chasqui I. Modul pro splnění stanovených cílů musí mít v sobě procesor (nazývaný OBC: Palubní počítač), který v každém modulu plní následující funkce:[Citace je zapotřebí ]
- Fotoaparát (SIMA): Reguluje snímání a ukládání satelitních snímků do externí paměti.
- Postoj (DCA): Pořadí a potvrzení pořadí stabilizace a prostorové orientace.
- Napájení (PCT): Spravuje a sleduje satelitní stavy fyzikálních proměnných, jako je teplota, napětí a proud.
- Komunikační (SICOM) pozemní stanice přijímá objednávky a odesílá informace o datech z kamer a piko-satelitních stavech
Spravovaná data jsou:[Citace je zapotřebí ] Data z kamery, Údržba dat a příkazy.
Řízení výkonu a teploty - PCT

Prvním subsystémem je Síla a je odpovědný za příjem, zpracování, skladování a distribuci energie do dalších subsystémů v Chasqui I. Cílem tohoto subsystému je zajistit dodávku elektřiny pro Chasqui, kterou mu dodávám potřebnou energii ve správný čas.
Druhým subsystémem je Thermal Control a je odpovědný za udržování teploty systému baterie a další součásti satelitu v jeho provozním dosahu, aby bylo zajištěno fungování Chasqui I. Nejkritičtějším úkolem tohoto subsystému je udržovat baterie v provozu v mezích svého provozu (0 ° C až 20 ° C). . Prostřednictvím ohřívačů speciálně navržených a vyrobených na National University of Engineering.
Oba subsystémy jsou[když? ] navržen a postaven na National Engineering University.[Citace je zapotřebí ]
Komunikační systém - SICOM
Modul TT & C je odpovědný za zajištění komunikačních prostředků mezi samotným vrcholem a satelitní pozemskou stanicí.[Citace je zapotřebí ]
Systém získávání obrazu - SIMA

Hlavním cílem výzkumné skupiny je získat fotografie Země od Chasqui I. SIMA Modul se skládá ze dvou kamer, viditelného dosahu a druhé v blízko infračerveného rozsah. Digitální informace jsou shromažďovány centrálním řídicím modulem a řídícími informacemi (CCMI) a poté odeslány na pozemskou stanici (ESTER).
Skupina je dále odpovědná za zpracování digitálních obrazů získaných fotoaparátem Chasqui I.
Identifikace systému a řízení přístupu - SDCA

SDCA v případě potřeby udržuje piko-satelitní stabilizaci a navádění do požadovaného směru. Konkrétně můžeme říci, že SDCA je zodpovědná za:[Citace je zapotřebí ]
- Stabilizujte piko-satelit po opuštění dispečera redukcí (do 0,1rad / s) a ovládejte jejich úhlové rychlosti.
- Udržujte přesnost ukazování 3 stupně pro fotografování Peru a pokud je to technicky možné, zajistěte široké pokrytí Jižní Ameriky prostřednictvím manévrů 30 stupňů při převrácení (Roll) a 30 stupňů (Pitch).
- Udržujte méně náročnou přesnost zaměřování (např. 20 stupňů), abyste umožnili data nahoru / dolů mezi piko-satelitem a pozemní stanicí.
SDCA umožňuje piko-satelitu pomocí senzorů určit jeho polohu, vypočítat korekci potřebnou k dosažení požadované orientace a provést potřebné manévry pomocí akčních členů. The systém určování postojů použije magnetometry, sluneční senzory a algoritmy určování polohy pro odhad pozic a úhlové rychlosti. Použitím GPS a gyroskopy budou také vyhodnoceny senzory pro stanovení postoje. Systém řízení polohy bude používat elektromagnetické cívky a permanentní magnety jako akční členy, tvořící tzv magnetorquery. Elektromagnetické cívky jsou obzvláště důležité pro stabilizaci piko-satelitu, jakmile opustí dispečer. Zahrnutí permanentního magnetu může mít systém aktivní-pasivní kontroly. Pro případnou implementaci bude prostudován více než jeden kontrolní zákon. Použití magnetické materiály a hysterický také být hodnocen.
Pozemní stanice - ESTER

Tento subsystém není součástí samotného satelitu, ale jeho existence a provoz je nezbytný pro dosažení cílů Chasqui I. Soubor zařízení a bezdrátová komunikace (rádio) potřebné ke komunikaci s Chasqui I a jakýmkoli satelitem.
Hlavní funkce tohoto modulu jsou:[Citace je zapotřebí ]
- Sledování: radioforo slyší maják nebo satelit pro jeho polohu.
- Telemetrie: Žádost stavové proměnné (teplota, napětí atd.) Monitorování a ověření satelitu obíhat výpočet.
- Komando: Příkaz k rozšíření satelitu anténa; objednávka reset systému, objednávka pořizování a odesílání fotografií.
Oběžné dráhy systému - SORS

Modul si klade za cíl simulovat trajektorie Chasqui I, která byla dříve vypočítána diferenciální rovnice pohybu a poté je vyřešit paralelní se dvěma programy: Delphi a Matlab.
Tato simulace se provádí zohledněním následujících fází:[Citace je zapotřebí ]
- Vzhledem k tomu, že Země je inerciální referenční systém, čtyřpólový člen gravitačního potenciálu a využití Newtonův druhý zákon, získali jsme pohybové rovnice jsou nelineární rovnice.
- Za použití Runge-Kutta řádu 4 s programem Delphi k řešení rovnic pohybové energie zbývající konstantní.
- Fáze 2 byla opakována s programem Matlab a pomocí tohoto softwaru jsou prováděny simulace trajektorie Chasqui I.
Integrace a testování modulů - MIP

Modul si klade za cíl dosáhnout sestavení komponent vyvinutých různými moduly projektu, jako jsou desky s elektronickými obvody, kamery, baterie, antény, senzory a elektromagnetické cívky.
Tohoto cíle lze dosáhnout:[Citace je zapotřebí ]
- Optimalizace povrchů, objemů, hmot, hledání těžiště, těžiště.
- Plánování a provádění standardizovaných požadavků na testování.
- Proveďte terénní testy plánované v projektu.
Viz také
Reference
externí odkazy
- National University of Engineering Domov této veřejné univerzity v Limě v Peru.
- CTIC - UNI Centrum informačních a komunikačních technologií (CTIC-UNI).
- Oficiální stránky projektu Chasqui 1 Veškeré informace týkající se projektu.