Dostředivý Catmull – Rom spline - Centripetal Catmull–Rom spline - Wikipedia
v počítačová grafika, dostředivý Catmull – Rom spline je variantní forma Catmull-Rom spline, původně formuloval Edwin Catmull a Raphael Rom,[1] který lze vyhodnotit pomocí rekurzivního algoritmu navrženého Barrym a Goldmanem.[2] Jedná se o typ interpolační spline (křivka, která prochází svými kontrolními body) definovanou čtyřmi kontrolními body , s křivkou nakreslenou pouze z na .




Definice

Nechat označit bod. Pro segment křivky definované body sekvence uzlů , dostředivý Catmull – Rom spline může být vyroben:
![{ mathbf {P}} _ {i} = [x_ {i} quad y_ {i}] ^ {T}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94b787f14d85118f4669426adc26edc700fc97e7)



kde





a
![t _ {{i + 1}} = left [{ sqrt {(x _ {{i + 1}} - x_ {i}) ^ {2} + (y _ {{i + 1}} - y_ {i} ) ^ {2}}} doprava] ^ {{ alpha}} + t_ {i}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3fbc45aa0c46308c07c445d0e1359cafca90a17)
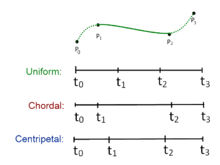
ve kterém rozsahy od 0 do 1 pro parametrizaci uzlů a s . U dostředivého spline Catmull – Rom je hodnota je . Když , výsledná křivka je standard uniformní Catmull – Rom spline; když , produkt je a chordal Catmull – Rom spline.







Zapojení do spline rovnic a ukazuje, že hodnota křivky spline v je . Podobně i střídání do spline rovnic to ukazuje na . To platí nezávisle na hodnotě protože rovnice pro není nutné k výpočtu hodnoty v bodech a .









Rozšíření na 3D body se jednoduše dosáhne zvážením obecný 3D bod a
![{ displaystyle mathbf {P} _ {i} = [x_ {i} quad y_ {i} quad z_ {i}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f8d209346f24c717009326402cc571a17b77b4)

![{ displaystyle t_ {i + 1} = left [{ sqrt {(x_ {i + 1} -x_ {i}) ^ {2} + (y_ {i + 1} -y_ {i}) ^ { 2} + (z_ {i + 1} -z_ {i}) ^ {2}}} vpravo] ^ { alpha} + t_ {i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4324aa06aa4fecb4a093c1fc499d931ecee8040f)
Výhody
Centripetal Catmull – Rom spline má několik žádoucích matematických vlastností ve srovnání s původní a jinými typy Catmull-Romovy formulace.[3] Nejprve nevytvoří smyčku ani samovolný průnik v segmentu křivky. Druhý, hrot nikdy nenastane v segmentu křivky. Za třetí, důsledněji sleduje kontrolní body.[vágní ]

Jiná použití
v počítačové vidění, k formulaci aktivního modelu pro segmentaci byl použit dostředivý spline Catmull-Rom. Tato metoda se nazývá aktivní spline model.[4] Model je navržen na základě aktivní tvarový model, ale používá dostředivé spline Catmull-Rom ke spojení dvou po sobě jdoucích bodů (aktivní model tvaru používá jednoduchou přímku), takže celkový počet bodů nutných k zobrazení tvaru je menší. Díky použití dostředivého spline Catmull-Rom je trénink tvarového modelu mnohem jednodušší a umožňuje lepší způsob úpravy kontury po segmentaci.
Příklad kódu v Pythonu
Následuje implementace spline Catmull – Rom v Krajta který vytváří níže zobrazený graf.
import numpyimport matplotlib.pyplot tak jako pltdef CatmullRomSpline(P0, P1, P2, P3, nBody=100): """ P0, P1, P2 a P3 by měly být (x, y) dvojice bodů, které definují spline Catmull-Rom. nPoints je počet bodů, které mají být zahrnuty do tohoto segmentu křivky. """ # Převeďte body na numpy, abychom mohli dělat násobení pole P0, P1, P2, P3 = mapa(numpy.pole, [P0, P1, P2, P3]) # Parametrická konstanta: 0,5 pro dostředivý spline, 0,0 pro rovnoměrný spline, 1,0 pro chordální spline. alfa = 0.5 # Předemplikovaná výkonová konstanta pro následující funkci tj (). alfa = alfa/2 def tj(ti, Pi, Pj): xi, yi = Pi xj, yj = Pj vrátit se ((xj-xi)**2 + (yj-yi)**2)**alfa + ti # Vypočítejte t0 až t4 t0 = 0 t1 = tj(t0, P0, P1) t2 = tj(t1, P1, P2) t3 = tj(t2, P2, P3) # Vypočítávejte pouze body mezi P1 a P2 t = numpy.linspace(t1, t2, nBody) # Přetvarujte, abychom mohli vynásobit body P0 až P3 # a získejte bod za každou hodnotu t. t = t.přetvarovat(len(t), 1) tisk(t) A1 = (t1-t)/(t1-t0)*P0 + (t-t0)/(t1-t0)*P1 A2 = (t2-t)/(t2-t1)*P1 + (t-t1)/(t2-t1)*P2 A3 = (t3-t)/(t3-t2)*P2 + (t-t2)/(t3-t2)*P3 tisk(A1) tisk(A2) tisk(A3) B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2 B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3 C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2 vrátit se Cdef CatmullRomŘetěz(P): """ Vypočítejte Catmull – Rom pro řetězec bodů a vraťte kombinovanou křivku. """ sz = len(P) # Křivka C bude obsahovat pole (x, y) bodů. C = [] pro i v rozsah(sz-3): C = CatmullRomSpline(P[i], P[i+1], P[i+2], P[i+3]) C.rozšířit(C) vrátit se C# Definujte sadu bodů, kterými má křivka projítBody = [[0, 1.5], [2, 2], [3, 1], [4, 0.5], [5, 1], [6, 2], [7, 3]]# Vypočítejte spline Catmull-Rom skrz bodyC = CatmullRomŘetěz(Body)# Převeďte body křivky Catmull-Rom na pole xay a vykreslete jeX, y = zip(*C)plt.spiknutí(X, y)# Vyneste kontrolní bodypx, py = zip(*Body)plt.spiknutí(px, py, 'nebo')plt.ukázat()
Příklad kódu v Unity C #
použitím UnityEngine;použitím System.Collections;použitím System.Collections.Generic;veřejnost třída Catmul : Mono chování { // Použijte transformace GameObjects ve 3D prostoru jako své body nebo definujte pole s požadovanými body veřejnost Přeměnit[] bodů; // Ukládejte body na křivce Catmull, abychom je mohli vizualizovat Seznam<Vector2> newPoints = Nový Seznam<Vector2>(); // Kolik bodů chcete na křivce uint numberOfPoints = 10; // Parametrická konstanta: 0,0 pro rovnoměrný spline, 0,5 pro dostředivý spline, 1,0 pro akordový spline veřejnost plovák alfa = 0,5f; ///////////////////////////// prázdnota Aktualizace() { CatmulRom(); } prázdnota CatmulRom() { newPoints.Průhledná(); Vector2 p0 = bodů[0].pozice; // Vector3 má implicitní převod na Vector2 Vector2 p1 = bodů[1].pozice; Vector2 p2 = bodů[2].pozice; Vector2 p3 = bodů[3].pozice; plovák t0 = 0,0f; plovák t1 = GetT(t0, p0, p1); plovák t2 = GetT(t1, p1, p2); plovák t3 = GetT(t2, p2, p3); pro (plovák t=t1; t<t2; t+=((t2-t1)/(plovák)numberOfPoints)) { Vector2 A1 = (t1-t)/(t1-t0)*p0 + (t-t0)/(t1-t0)*p1; Vector2 A2 = (t2-t)/(t2-t1)*p1 + (t-t1)/(t2-t1)*p2; Vector2 A3 = (t3-t)/(t3-t2)*p2 + (t-t2)/(t3-t2)*p3; Vector2 B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2; Vector2 B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3; Vector2 C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2; newPoints.Přidat(C); } } plovák GetT(plovák t, Vector2 p0, Vector2 p1) { plovák A = Mathf.Pow((p1.X-p0.X), 2,0f) + Mathf.Pow((p1.y-p0.y), 2,0f); plovák b = Mathf.Pow(A, alfa * 0,5f); vrátit se (b + t); } // Vizualizujte body prázdnota OnDrawGizmos() { Gizmos.barva = Barva.Červené; pro každého (Vector2 tepl v newPoints) { Vector3 poz = Nový Vector3(tepl.X, tepl.y, 0); Gizmos.DrawSphere(poz, 0,3 f); } }}U implementace v 3D prostoru by se po převodu bodů Vector2 na Vector3 měl první řádek funkce GetT změnit na toto: Mathf.Pow ((p1.x-p0.x), 2.0f) + Mathf.Pow ((p1.y-p0.y), 2.0f) + Mathf.Pow ((p1.z-p0.z), 2,0f);
Příklad kódu v Unreal C ++
plovák GetT( plovák t, plovák alfa, konst FVektor& p0, konst FVektor& p1 ){ auto d = p1 - p0; plovák A = d | d; // Tečkovaný produkt plovák b = FMath::Pow( A, alfa*.5f ); vrátit se (b + t);}FVektor CatMullRom( konst FVektor& p0, konst FVektor& p1, konst FVektor& p2, konst FVektor& p3, plovák t / * mezi 0 a 1 * /, plovák alfa=.5f / * mezi 0 a 1 * / ){ plovák t0 = 0,0f; plovák t1 = GetT( t0, alfa, p0, p1 ); plovák t2 = GetT( t1, alfa, p1, p2 ); plovák t3 = GetT( t2, alfa, p2, p3 ); t = FMath::Lerp( t1, t2, t ); FVektor A1 = ( t1-t )/( t1-t0 )*p0 + ( t-t0 )/( t1-t0 )*p1; FVektor A2 = ( t2-t )/( t2-t1 )*p1 + ( t-t1 )/( t2-t1 )*p2; FVektor A3 = ( t3-t )/( t3-t2 )*p2 + ( t-t2 )/( t3-t2 )*p3; FVektor B1 = ( t2-t )/( t2-t0 )*A1 + ( t-t0 )/( t2-t0 )*A2; FVektor B2 = ( t3-t )/( t3-t1 )*A2 + ( t-t1 )/( t3-t1 )*A3; FVektor C = ( t2-t )/( t2-t1 )*B1 + ( t-t1 )/( t2-t1 )*B2; vrátit se C;}Viz také
Reference
- ^ Catmull, Edwin; Rom, Raphaeli (1974). "Třída lokálních interpolačních splajnů". V Barnhill, Robert E .; Riesenfeld, Richard F. (eds.). Počítačem podporovaný geometrický design. 317–326. doi:10.1016 / B978-0-12-079050-0.50020-5. ISBN 978-0-12-079050-0.
- ^ Barry, Phillip J .; Goldman, Ronald N. (srpen 1988). Algoritmus rekurzivního vyhodnocení pro třídu Spline Catmull – Rom. Sborník z 15. výroční konference o počítačové grafice a interaktivních technikách, SIGGRAPH 1988. 22. Sdružení pro výpočetní techniku. 199–204. doi:10.1145/378456.378511.
- ^ Yuksel, Cem; Schaefer, Scott; Keyser, John (červenec 2011). "Parametrizace a aplikace křivek Catmull-Rom". Počítačem podporovaný design. 43 (7): 747–755. CiteSeerX 10.1.1.359.9148. doi:10.1016 / j.cad.2010.08.008.
- ^ Jen Hong, Tan; Acharya, U. Rajendra (2014). "Aktivní spline model: modelová interaktivní segmentace založená na tvaru" (PDF). Zpracování digitálních signálů. 35: 64–74. arXiv:1402.6387. doi:10.1016 / j.dsp.2014.09.002. S2CID 6953844.
externí odkazy
- Křivka Catmull-Rom bez hrbolů a bez křižovatek - implementace v Javě
- Křivka Catmull-Rom bez hrbolů a bez křižovatek - zjednodušená implementace v C ++
- Catmull-Rom splajny - interaktivní generování přes Python, v notebooku Jupyter