Quickhull - Quickhull - Wikipedia
Quickhull je metoda výpočtu konvexní obal konečné sady bodů v n-rozměrný prostor. Používá a rozděl a panuj podobný přístup jako quicksort, od kterého je odvozen jeho název. Za jeho nejhorší případ se považuje složitost pro 2-dimenzionální a 3-dimenzionální prostor , kde je počet vstupních bodů a je počet zpracovaných bodů[1]. Na rozdíl od quicksortu však neexistuje žádný zřejmý způsob, jak převést quickhull na randomizovaný algoritmus. Přesto existují díla z Vyhlazená analýza což nám říká, že 2-dimenzionální algoritmus Quick hull očekával dobu běhu . Vskutku, [2] a související práce ukazují, že počet bodů na konvexním trupu libovolné náhodně narušené množiny bodů s Gaussovým šumem je z čehož vyplývá, že rychlý trup (a mnoho dalších algoritmů) může trvat jen čas na libovolnou sadu narušených bodů.






N-rozměrný Quickhull vynalezl v roce 1996 C. Bradford Barber, David P. Dobkin a Hannu Huhdanpaa.[1] Jednalo se o rozšíření rovinného Quickhullova algoritmu Jonathana Scotta Greenfielda z roku 1990, ačkoli autoři z roku 1996 o jeho metodách nevěděli.[3] Místo toho to Barber et al popisuje jako deterministickou variantu Clarksonova a Shorova algoritmu z roku 1989.[1]
Algoritmus
Za průměrných okolností algoritmus funguje docela dobře, ale zpracování se obvykle zpomalí v případech vysoké symetrie nebo bodů ležících na obvodu kruhu. Algoritmus lze rozdělit na následující kroky:[3]
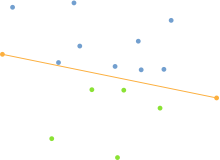
- Najděte body s minimálními a maximálními souřadnicemi x, protože ty budou vždy součástí konvexního trupu. Pokud existuje mnoho bodů se stejným minimem / maximem x, použijte odpovídající body s minimem / maximem y.
- Pomocí čáry tvořené dvěma body rozdělte množinu na dvě podmnožiny bodů, které budou zpracovány rekurzivně.
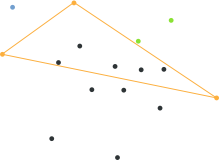
- Určete bod na jedné straně přímky s maximální vzdáleností od přímky. Tento bod tvoří trojúhelník s přímkami.
- Body ležící uvnitř tohoto trojúhelníku nemohou být součástí konvexního trupu, a proto je lze v následujících krocích ignorovat.
- Opakujte předchozí dva kroky na dvou liniích tvořených trojúhelníkem (ne počáteční linii).
- Pokračujte v tom, dokud nezůstanou žádné další body, rekurze skončila a vybrané body tvoří konvexní trup.

Problém je složitější v případě vyšší dimenze, protože trup je postaven z mnoha aspektů; datová struktura to musí zohlednit a zaznamenat také přímku / rovinu / nadrovinu (hřeben) sdílenou sousedními fazetami. Pro d rozměry:[1]
- Výběr d +1 body ze sady, které nesdílejí rovinu nebo nadrovinu. To tvoří počáteční trup s fazetami Fs [].
- Pro každého F v Fs [], najděte všechny nepřiřazené body, které jsou „nad“, tj. směřující od středu trupu, a přidejte jej do „vnější“ sady F.O. spojený s F.
- Pro každého F s neprázdným F.O.:
- Najděte bod p s maximální vzdáleností od F. Přidáme to do trupu.
- Vytvořte viditelnou sadu PROTI a inicializujte jej na F. Rozšířit PROTI ve všech směrech pro sousední fazety F v dokud nebudou viditelné žádné další aspekty p. F v být viditelný z p znamená, že p je výše F v
- Hranice PROTI pak tvoří soubor obzorových hřebenů H.
- Nechat Nové [] být množinou fazet vytvořených z p a všechny hřebeny dovnitř H.
- Pro každý nový aspekt v Nové [], proveďte krok (2) a inicializujte své vlastní vnější sady. Tentokrát se podívejte pouze z bodů, které jsou mimo fazetu PROTI pomocí jejich vnějších sad V [i] .O, protože jsme se rozšířili pouze tímto směrem.
- Odstraňte nyní interní fazety v PROTI z Fs []. Přidejte nové fazety Nové [] na Fs [] a pokračujte v iteraci.
Pseudokód pro 2D sadu bodů
Vstup = sada S n bodů Předpokládejme, že ve vstupní sadě S bodů jsou alespoň 2 bodyfunkce QuickHull (S) je // Najděte konvexní trup z množiny S bodů n Konvexní trup: = {} Najděte levý a pravý nejvíce bodů, řekněte A & B a přidejte A & B do konvexního trupu. Segment AB rozděluje zbývající (n - 2) body do 2 skupin S1 a S2 kde S1 jsou body v S které jsou na pravé straně orientované čáry od A na B, a S2 jsou body v S které jsou na pravé straně orientované čáry od B na A NajítHull (S1, A, B) NajítHull (S2, B, A) Výstup: = Konvexní trupkoncová funkcefunkce NajítHull (Sk, P, Q) je // Najděte body na konvexním trupu ze sady Sk bodů // které jsou na pravé straně orientované přímky od P do Q -li Sk nemá smysl pak vrátit se Z dané množiny bodů v Sk, najděte nejvzdálenější bod, řekněme C, ze segmentu PQ Přidat bod C na konvexní trup v místě mezi P a Q Tři body P, Q, a C rozdělit zbývající body Sk do 3 podmnožin: S0, S1, a S2 kde S0 jsou body uvnitř trojúhelníku PCQ, S1 jsou body na pravé straně orientované čáry od P na C, a S2 jsou body na pravé straně orientované čáry od C na Q. NajítHull (S1, P, C) NajítHull (S2, C, Q) koncová funkcePseudokód specializovaný pro 3D případ je k dispozici od Jordan Smith. Zahrnuje podobnou strategii „maximálního bodu“ pro výběr výchozího trupu. Pokud jsou tyto maximální body zdegenerované, je také celý mrak bodů.[4]
Viz také
Reference
- ^ A b C d Barber, C. Bradford; Dobkin, David P .; Huhdanpaa, Hannu (1. prosince 1996). "Algoritmus quickhull pro konvexní trupy" (PDF). Transakce ACM na matematickém softwaru. 22 (4): 469–483. doi:10.1145/235815.235821.
- ^ Devillers, Olivier; Glisse, Xavier Goaoc; Thomasse, Remy (2015). O vyhlazené složitosti konvexních trupů. 31. mezinárodní symposium o výpočetní geometrii. Schloss Dagstuhl - Leibniz-Zentrum fuer Informatik.
- ^ A b Greenfield, Jonathan S. (1. dubna 1990). „Důkaz pro algoritmus QuickHull“. Elektrotechnika a informatika - technické zprávy.
- ^ Smith, Jordan. „QuickHull 3D“. algolist.ru. Citováno 22. října 2019.
- Dave Mount. „Lecture 3: More Convex Hull Algorithms“.
- Pseudo kód, "http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html ".
externí odkazy
- Implementace QuickHull (GDC 2014) - Prezentace algoritmu s podrobnostmi 3D implementace.