Populační protokol - Population protocol
A populační protokol je distribuované výpočty model vytvořený mobilními agenty s omezeným zdrojem, kteří se náhodně setkávají podle interakční graf. Funkce se počítají aktualizací stavu agentů, kdykoli se setkají na základě jejich předchozího stavu, a výsledek výpočtu lze číst ve stavech agentů, jakmile má výpočet konvergované.
Modelka
K dispozici je sada uzlů. Každý uzel je konečný automat s státy. Důležitou třídou populačních protokolů jsou většinové algoritmy, jejichž cílem je vypočítat většinový bit: každý uzel začíná bitem víry v a cílem je navrhnout protokol, na jehož konci je bit víry každého uzlu správný počáteční většinový bit.



Diskrétní časová verze modelu je následující: v každém bodě včas nějaký uzel je vybrán rovnoměrně náhodně. Poté je uzel spárován s jiným uzlem , který je náhodně vybrán jednotně ze sady sousedů uzlu . Poté uzly a vyměňovat si obsah paměti a aktualizovat jejich stavy. Alternativně lze uvažovat o kontinuálním časovém modelu, kde každý uzel má Poissonovy hodiny, které zvoní jednotkovou rychlostí. Když hodiny uzlu zazvoní, tento uzel komunikuje s náhodným sousedem.



Protokoly jsou často navrženy tak, aby se minimalizovala doba konvergence nebo množství paměti požadované na uzel nebo obojí.[1]
Protokol o třech státech
Pro problém výpočtu většiny (shoda) existuje známý protokol, který vyžaduje pouze tři stavy paměti na uzel a byl analyzován pro kompletní grafy interakce.[2][3] Tento protokol funguje následovně. Nechte každý uzel inicializovat jeho paměťový stav na jejich počáteční bit víry V každém okamžiku, kdy dva uzly komunikují, aktualizují svůj stav podle následující tabulky. Popisky řádků udávají stav iniciátora a popisky sloupců stav respondenta.

| 0 | ? | 1 | |
|---|---|---|---|
| 0 | (0,0) | (0,0) | (0,?) |
| ? | (?,0) | (?,?) | (?,1) |
| 1 | (1,?) | (1,1) | (1,1) |
Například pokud uzel s vírou dostane uzavřeno s uzlem s vírou , pak si oba uzly zachovají svoji víru; aktualizace je podobná, pokud jsou obě víry nebo oba jsou . Pokud však víra iniciátora je a víra respondenta je , poté respondent aktualizuje svoji víru . Pokud má naopak iniciátor víru a respondent má víru , pak respondent změní svou víru na . Tento protokol je jednosměrný: každá interakce se mění maximálně ve stavu respondenta; lze jej tedy implementovat pomocí jednosměrné komunikace.



Angluin, Aspnes a Eisenstat [2] ukázal, že z jakékoli počáteční konfigurace, která nespočívá ve všech"s, třístavový protokol přibližné většiny konverguje buď ke všem uzlům, které věří nebo všechny uzly, které mají víru v rámci interakce s vysokou pravděpodobností. Vybraná hodnota bude navíc většinou ne- “"počáteční hodnota, pokud přesahuje menšinu dostatečným rozpětím.

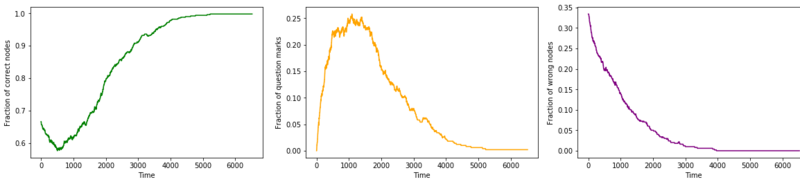
Následující obrázek ukazuje vývoj protokolu tří stavů na sadě uzly, kde jedna třetina uzlů má počáteční bit víry , zatímco zbývající dvě třetiny mají počáteční bit víry . Zlomek „"uzly (oranžově) začínají na nule, na chvíli se zvětšují a pak se opět pohybují na nulu.

Dějiny
Populační protokoly byly zavedeny Dana Angluin et al.[4] jako jeden z prvních modely výpočtu být plně decentralizovaný a zapojit agenty s velmi omezenými zdroji, např. ti, kteří se nacházejí v senzorové sítě. Od té doby našel tento abstraktní výpočetní model aplikace v robotika[5] a chemie.[6]
Viz také
Reference
- ^ Alistarh, Dan; Aspnes, James; Eisenstat, David; Gelashvili, Rati; Rivest, Ronald L. (2016-01-16). „Časoprostorové kompromisy v populačních protokolech“. Soda '17. Společnost pro průmyslovou a aplikovanou matematiku: 2560–2579. arXiv:1602.08032. Bibcode:2016arXiv160208032A. Citovat deník vyžaduje
| deník =(Pomoc) - ^ A b Angluin, Dana; Aspnes, James; Eisenstat, David (2007), „Jednoduchý populační protokol pro rychlou a robustní přibližnou většinu“, Distribuované výpočty, Přednášky v informatice, 4731Springer Berlin Heidelberg, str. 20–32, doi:10.1007/978-3-540-75142-7_5, ISBN 9783540751410
- ^ Perron, E .; Vasudevan, D .; Vojnovic, M. (duben 2009). "Použití tří států pro binární konsenzus o kompletních grafech". IEEE INFOCOM 2009 - 28. konference o počítačové komunikaci. IEEE: 2527–2535. doi:10.1109 / infcom.2009,5062181. ISBN 9781424435128.
- ^ Dana Angluin James Aspnes, Zoë Diamadi, Michael J. Fischer, René Peralta. Výpočet pasivně mobilních konečných snímačů v sítích. Distribuované výpočty, 2006. [1]

- ^ Gregory Dudek, Michael Jenkin. Výpočtové principy mobilní robotiky, Kapitola 10.
- ^ Ho-Lin Chen, David Doty, David Soloveichik. Výpočet deterministické funkce se sítěmi chemických reakcí. Přirozené výpočty, 2014. [2]
| Všeobecné | |
|---|---|
| Úrovně | |
| Multithreading | |
| Teorie | |
| Elementy | |
| Koordinace | |
| Programování | |
| Hardware | |
| API | |
| Problémy | |
| |