Magnetický pohon MEMS - MEMS magnetic actuator - Wikipedia
A Magnetický pohon MEMS je zařízení, které používá mikroelektromechanické systémy (MEMS) převést elektrický proud na mechanický výstup využitím dobře známého Lorentzova rovnice sil nebo teorie Magnetismus.
Přehled MEMS
Technologie Micro-Electro-Mechanical System (MEMS)[1] je procesní technologie, ve které jsou mechanická a elektromechanická zařízení nebo konstrukce konstruovány pomocí speciálních mikro-výrobní techniky. Mezi tyto techniky patří: hromadné mikroobrábění, povrchové mikroobrábění, LIGA, lepení oplatky, atd.

Zařízení se považuje za zařízení MEMS, pokud splňuje následující podmínky:
- Pokud je velikost jeho funkce mezi 0,1µm a stovky mikrometrů. (pod tímto rozsahem se stává nano zařízením a nad rozsahem je považován za mezosystém)
- Pokud má při provozu nějakou elektrickou funkčnost. To by mohlo zahrnovat generování napětí elektromagnetickou indukcí, změnou mezery mezi 2 elektrodami nebo piezoelektrickým materiálem.
- Pokud má zařízení některé mechanické funkce, jako je deformace paprsku nebo bránice v důsledku napětí nebo přetvoření.
- Pokud má systémovou funkčnost. Zařízení musí být integrovatelné do jiných obvodů, aby vytvořilo systém. To by byly propojovací obvody a obaly pro zařízení, aby se staly užitečnými.
Pro analýzu každého zařízení MEMS je vytvořen Locusův předpoklad: že pokud je velikost zařízení mnohem menší než charakteristické délkové měřítko jevu (vlna nebo difúze), pak by v celém zařízení nebyly žádné prostorové variace. Za tohoto předpokladu je modelování snadné.[2]

Provoz v MEMS
Tři hlavní operace v MEMS jsou:
- Snímání: měření mechanického vstupu převedením na elektrický signál, např. akcelerometr MEMS nebo tlakový senzor (může také měřit elektrické signály jako v případě proudových senzorů)
- Ovládání: pomocí elektrického signálu způsobí posunutí (nebo rotaci) mechanické konstrukce, např. syntetický tryskový aktuátor.
- Výroba energie: generuje energii z mechanického vstupu, např. MEMS energetické kombajny
Tyto tři operace vyžadují určitou formu transdukčních schémat, nejoblíbenější jsou: piezoelektrický, elektrostatický, piezorezistivní, elektrodynamické, magnetické a magnetostrikční. Magnetické akční členy MEMS používají pro svou činnost poslední tři schémata.
Magnetické ovládání
Princip magnetického ovládání je založen na Lorentzově silové rovnici.

Když je vodič nesoucí proud umístěn do statického magnetického pole, pole vytvářené kolem vodiče interaguje se statickým polem a vytváří sílu. Tato síla může být použita k vyvolání posunutí mechanické konstrukce.

Rozhodující rovnice a parametry
Vpravo je zobrazen typický aktuátor MEMS. Pro jednu otáčku kruhové cívky jsou rovnice, které řídí její činnost, následující:[3]
- H-pole z kruhového vodiče:

- Síla produkovaná interakcí hustot toku:

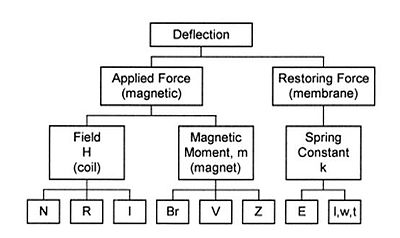
Vychýlení mechanické konstrukce pro ovládání závisí na určitých parametrech zařízení. K uvedení do činnosti musí existovat použitá síla a obnovovací síla. Použitá síla je síla představovaná výše uvedenou rovnicí, zatímco obnovovací síla je fixována pružinovou konstantou pohybující se struktury.
Použitá síla závisí jak na poli z cívek, tak na magnetu. Hodnota remanence magnetu,[4] jeho objem a poloha od cívek přispívají k jeho účinku na aplikovanou Sílu. Zatímco počet závitů cívky, její velikost (poloměr) a množství proudu, který jím prochází, určuje její účinek na aplikovanou sílu. Konstanta pružiny závisí na Youngově modulu pohybující se struktury a jeho délce, šířce a tloušťce.
Magnetostrikční akční členy
Magnetické ovládání se neomezuje pouze na použití Lorentzovy síly k mechanickému posunutí. Magnetostrikční akční členy mohou také použít teorii magnetismu k dosažení posunutí. Materiály, které při vystavení magnetickému poli mění svůj tvar, lze nyní použít k pohonu vysoce spolehlivých lineárních motorů a akčních členů.
Příkladem je niklová tyč, která má tendenci se deformovat, když je umístěna ve vnějším magnetickém poli. Dalším příkladem je ovinutí řady elektromagnetických indukčních cívek kolem kovové trubky, ve které je umístěn materiál Terfenol-D. Cívky vytvářejí pohyblivé magnetické pole, které se vlní dolů po postupných vinutích podél statorové trubice. Jelikož pohybující se magnetické pole způsobuje prodloužení každého následujícího průřezu Terfenol-D, pak se smršťuje, když je pole odstraněno, prut ve skutečnosti „leze“ dolů statorovou trubkou jako červí červ. Opakované šířící se vlny magnetického toku přenese tyč dolů po délce trubice a vytvoří užitečný zdvih a silový výstup. Množství pohybu generovaného materiálem je úměrné magnetickému poli vytvářenému cívkovým systémem, které je funkcí elektrického proudu. Tento typ hnacího zařízení, které se vyznačuje jedinou pohyblivou částí, se nazývá pružný nebo peristaltický lineární motor. (Pohled:Video magnetostrikčního mikro chodítka )
Výhody magnetických akčních členů
- Velká ovládací síla a zdvih (zdvih)
- Přímá, plně lineární transdukce (v případě elektrodynamického ovládání)
- Obousměrné ovládání
- Bezkontaktní dálkové ovládání
- Nízkonapěťové ovládání
- Předností pro akční členy je hustota energie pole, kterou lze uložit do mezery mezi rotorem a statorem. Magnetické ovládání má potenciálně vysokou hustotu energie[5]
Materiál magnetu

Činnost magnetického aktuátoru závisí na interakci mezi polem z elektromagnetu a statickým polem. K vytvoření tohoto statického pole je důležité použít správný materiál. V MEMS, permanentní magnety se staly oblíbenými, protože mají velmi dobrý faktor měřítka a zachovávají si svou magnetizaci, i když zde není žádné vnější pole ... což znamená, že když se používají, nemusí být nepřetržitě magnetizovány[6][7][8][9][10]
Integrace magnetu do zařízení MEMS
Jak již bylo zmíněno dříve, zařízení MEMS jsou navržena a vyrobena pomocí speciálních technik mikro-výroby. Hlavní výzvou pro magnetické MEMS je však integrace magnetu do zařízení MEMS.[11][12] Nedávný výzkum navrhl řešení této výzvy.
Výroba (nebo formování) magnetu
Existuje několik způsobů, jak lze magnet vyrobit na struktuře MEMS:
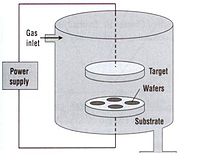
- Prskání: Argon iontové bombardování materiálu uvolňující částice materiálu. Hlavně pro ukládání magnetů vzácných zemin. Rychlost nanášení a povrch filmu závisí na rozprašovacím nástroji a velikosti cíle
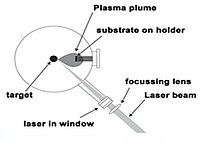
- Pulzní ukládání vrstev: vysoce výkonný pulzní laser paprsek je zaostřen uvnitř a vakuová komora zasáhnout cíl materiálu, který má být uložen
- Galvanické pokovování
- Sítotisk
- Vosk/Parylen lepení[13][14][15]
Problémy s magnetickým ovládáním
- Vysoký výkonový rozptyl. To je pro magnetické MEMS hlavní problém, ale pracuje se na jeho obcházení.[16]
- Výroba cívky
- Integrace mikromagnetu do zařízení MEMS
- Kompatibilita procesních materiálů
- Integrovatelnost do celkového procesu mikrofabrikace (zachování nákladů a propustnosti)
- Aby nedocházelo k manipulaci s již existujícími procesy při výrobě zařízení MEMS, musí být tolerovatelné teploty depozice a podmínky / podmínky po depozici. Mikromagnet musí být také schopen odolat jakémukoli chemickému ošetření, které nastane po jeho usazení
- Problémy s magnetizací (Jeden může chtít mít více než jeden směr magnetizace; to vytváří problém)[17]
Každou z těchto výzev lze zmírnit nebo zmírnit správným výběrem materiálu, volbou způsobu tváření nebo výroby a typem zařízení, které má být zkonstruováno. Použití magnetického ovladače zahrnuje: syntetický tryskový aktuátor, mikročerpadla a mikro relé.
Reference
- ^ Senturia, Stephen D. (2001). Návrh mikrosystému. ISBN 978-0-7923-7246-2.
- ^ Arnold, D. (podzim 2010 - jaro 2011). Poznámky k přednášce o převodnících MEMS.
- ^ Wagner, B .; w. Benecke. "Mikrofabrikovaný aktuátor s pohyblivým permanentním magnetem". Citovat deník vyžaduje
| deník =(Pomoc) - ^ Dodrill, B. C .; B. J. Kelley. "Měření s VSM - materiály s permanentními magnety". Citovat deník vyžaduje
| deník =(Pomoc) - ^ Arnold, D. „Permanentní magnety pro MEMS“. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Gibbs, M RJ; E W Hill; P J Wright. "Magnetické materiály pro aplikace MEMS". Citovat deník vyžaduje
| deník =(Pomoc) - ^ National Imports LLC. "Příručka pro výběr a design permanentních magnetů". Citovat deník vyžaduje
| deník =(Pomoc) - ^ Arnold, D. „Permanentní magnety pro MEMS“. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Wang, N. (2010). "Výroba a integrace materiálů s permanentními magnety do převodníků MEMS". Bibcode:2010PhDT ........ 49W. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Arnold, David. "Permanentní magnety pro MEMS". Citovat deník vyžaduje
| deník =(Pomoc) - ^ Schiavone, Giuseppe; Desmulliez, Marc P. Y .; Walton, Anthony J. (2014-08-29). „Integrovaná magnetická relé MEMS: stav technologie“. Mikromotory. 5 (3): 622–653. doi:10,3390 / mi5030622.
- ^ Chin, Tsung-Shune (2000). "Filmy s permanentními magnety pro aplikace v mikroelektromechanických systémech". Journal of Magnetism and Magnetic Materials. 209 (1): 75–79. Bibcode:2000JMMM..209 ... 75C. doi:10.1016 / S0304-8853 (99) 00649-6.
- ^ Arnold, D .; B. Bowers; N. Wang (2008). „Voskem vázané NdFeB mikromagnety pro aplikace mikroelektromechanických systémů“. Journal of Applied Physics. 103 (7): 07E109. Bibcode:2008JAP ... 103gE109W. doi:10.1063/1.2830532.
- ^ Wang, N. (2010). "Výroba a integrace materiálů s permanentními magnety do převodníků MEMS". Bibcode:2010PhDT ........ 49W. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Yang, Tzu-Shun; Naigang Wang; David P. Arnold. „Výroba a charakterizace práškových mikromagnetů Nd – Fe – B vázaných na parylen“. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Guckel, H. „Pokrok v magnetických mikroaktivátorech“. Citovat deník vyžaduje
| deník =(Pomoc) - ^ Gatzen, Hans H. „Pokroky v evropské technologii magnetických MEMS“. Citovat deník vyžaduje
| deník =(Pomoc)